
管道外探伤行走机器人.pdf

论文****轩吖


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
管道外探伤行走机器人.pdf
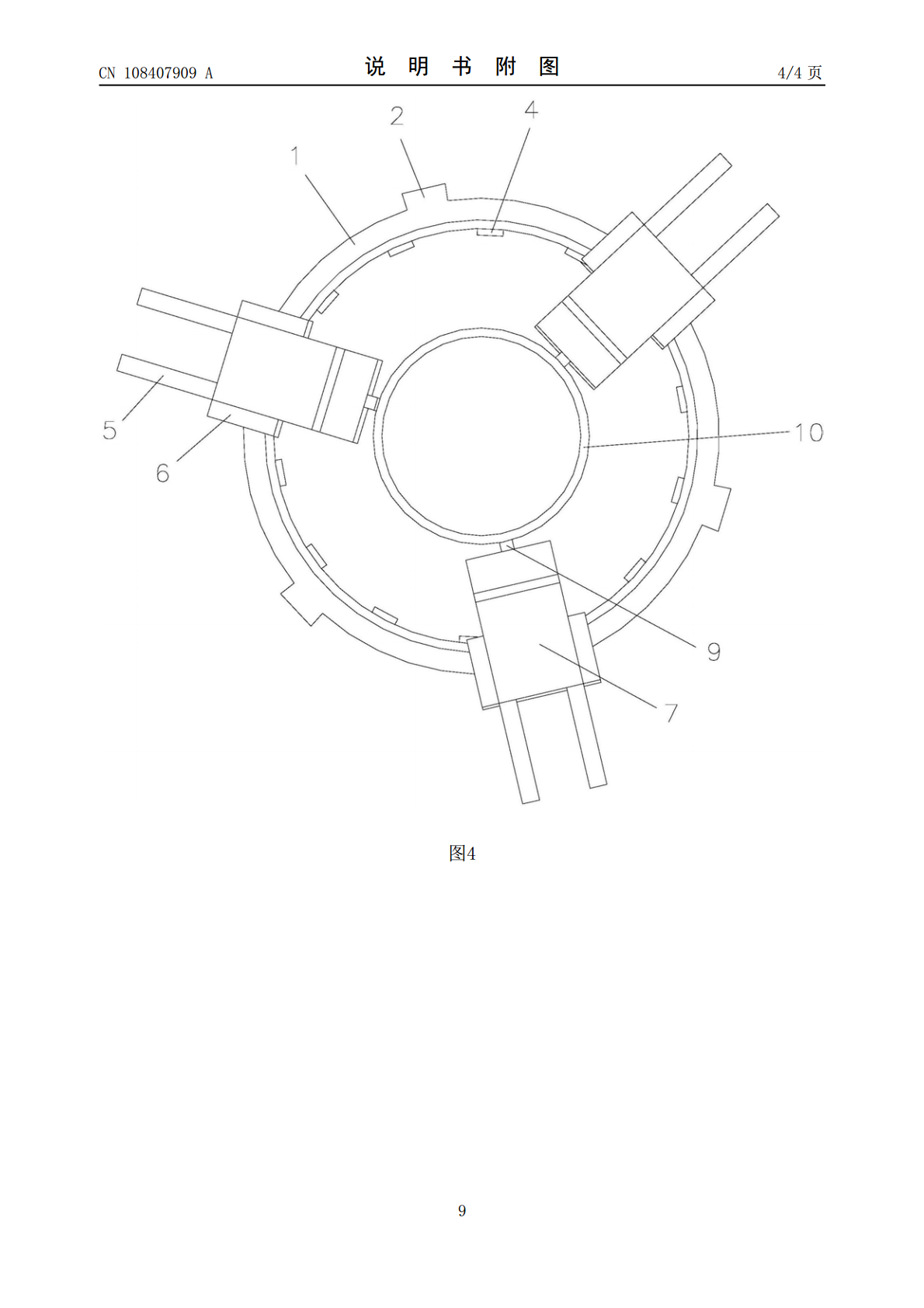
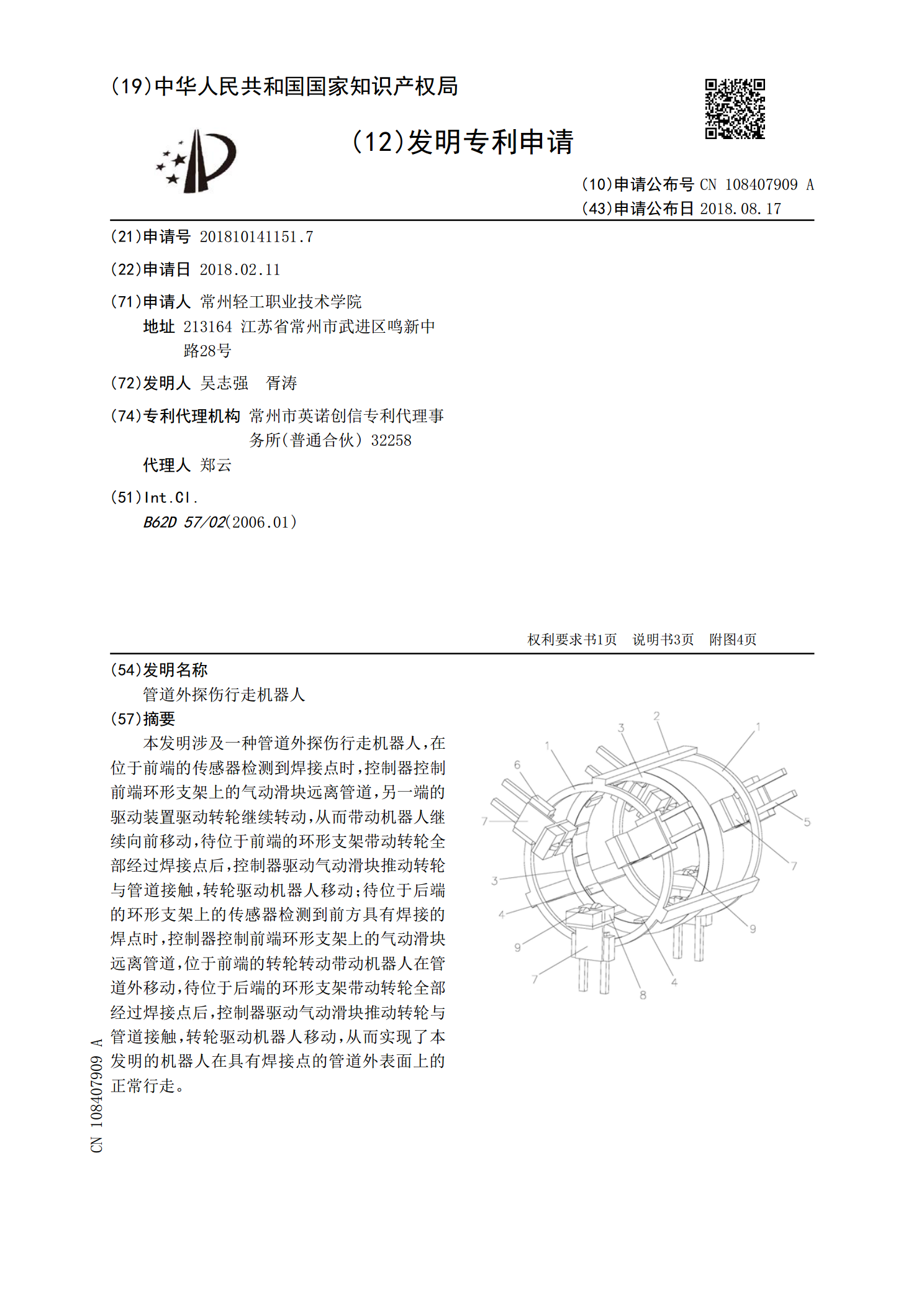
本发明涉及一种管道外探伤行走机器人,在位于前端的传感器检测到焊接点时,控制器控制前端环形支架上的气动滑块远离管道,另一端的驱动装置驱动转轮继续转动,从而带动机器人继续向前移动,待位于前端的环形支架带动转轮全部经过焊接点后,控制器驱动气动滑块推动转轮与管道接触,转轮驱动机器人移动;待位于后端的环形支架上的传感器检测到前方具有焊接的焊点时,控制器控制前端环形支架上的气动滑块远离管道,位于前端的转轮转动带动机器人在管道外移动,待位于后端的环形支架带动转轮全部经过焊接点后,控制器驱动气动滑块推动转轮与管道接触,转
一种管道外行走机器人.pdf
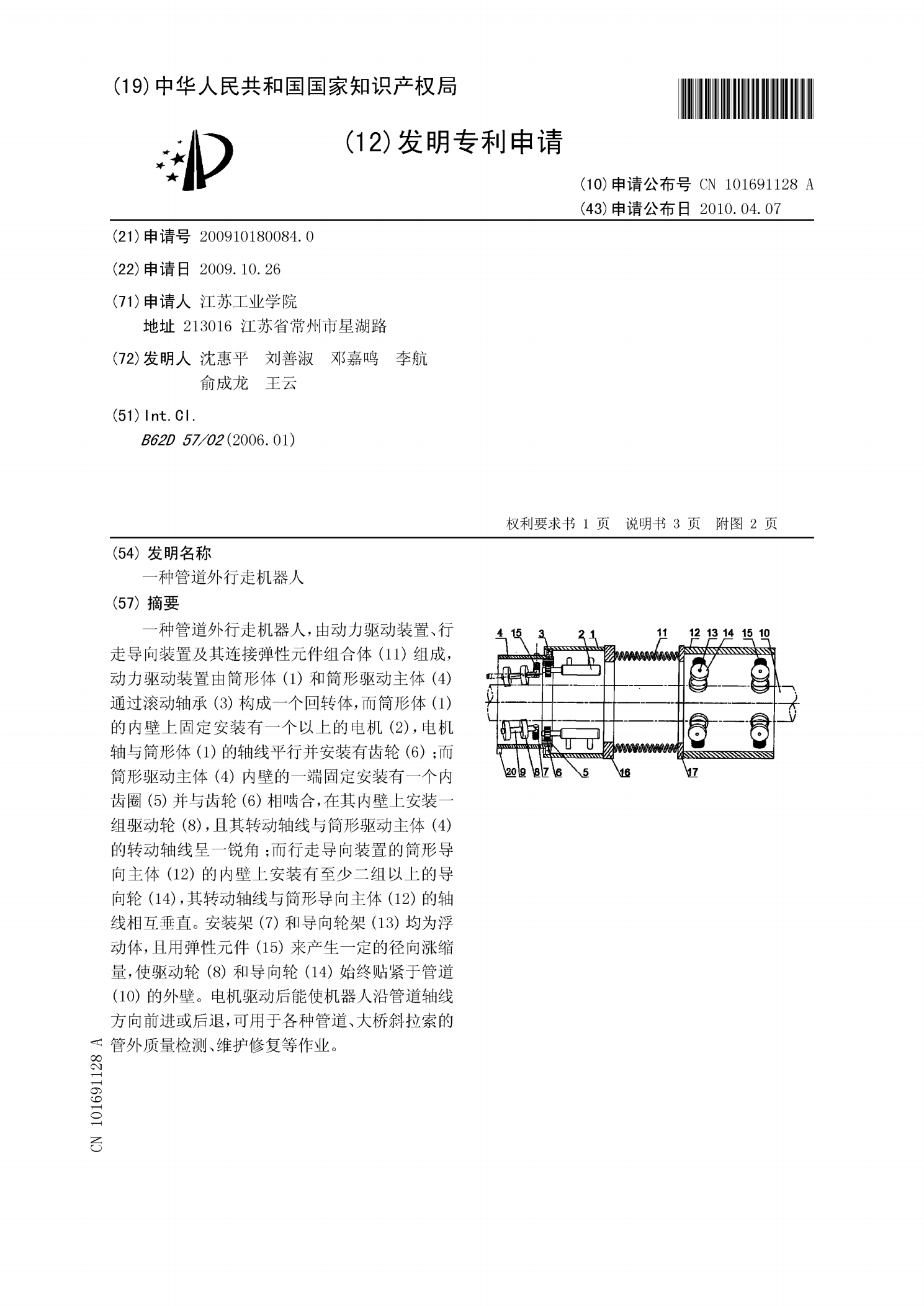
一种管道外行走机器人,由动力驱动装置、行走导向装置及其连接弹性元件组合体(11)组成,动力驱动装置由筒形体(1)和筒形驱动主体(4)通过滚动轴承(3)构成一个回转体,而筒形体(1)的内壁上固定安装有一个以上的电机(2),电机轴与筒形体(1)的轴线平行并安装有齿轮(6);而筒形驱动主体(4)内壁的一端固定安装有一个内齿圈(5)并与齿轮(6)相啮合,在其内壁上安装一组驱动轮(8),且其转动轴线与筒形驱动主体(4)的转动轴线呈一锐角;而行走导向装置的筒形导向主体(12)的内壁上安装有至少二组以上的导向轮(14)
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
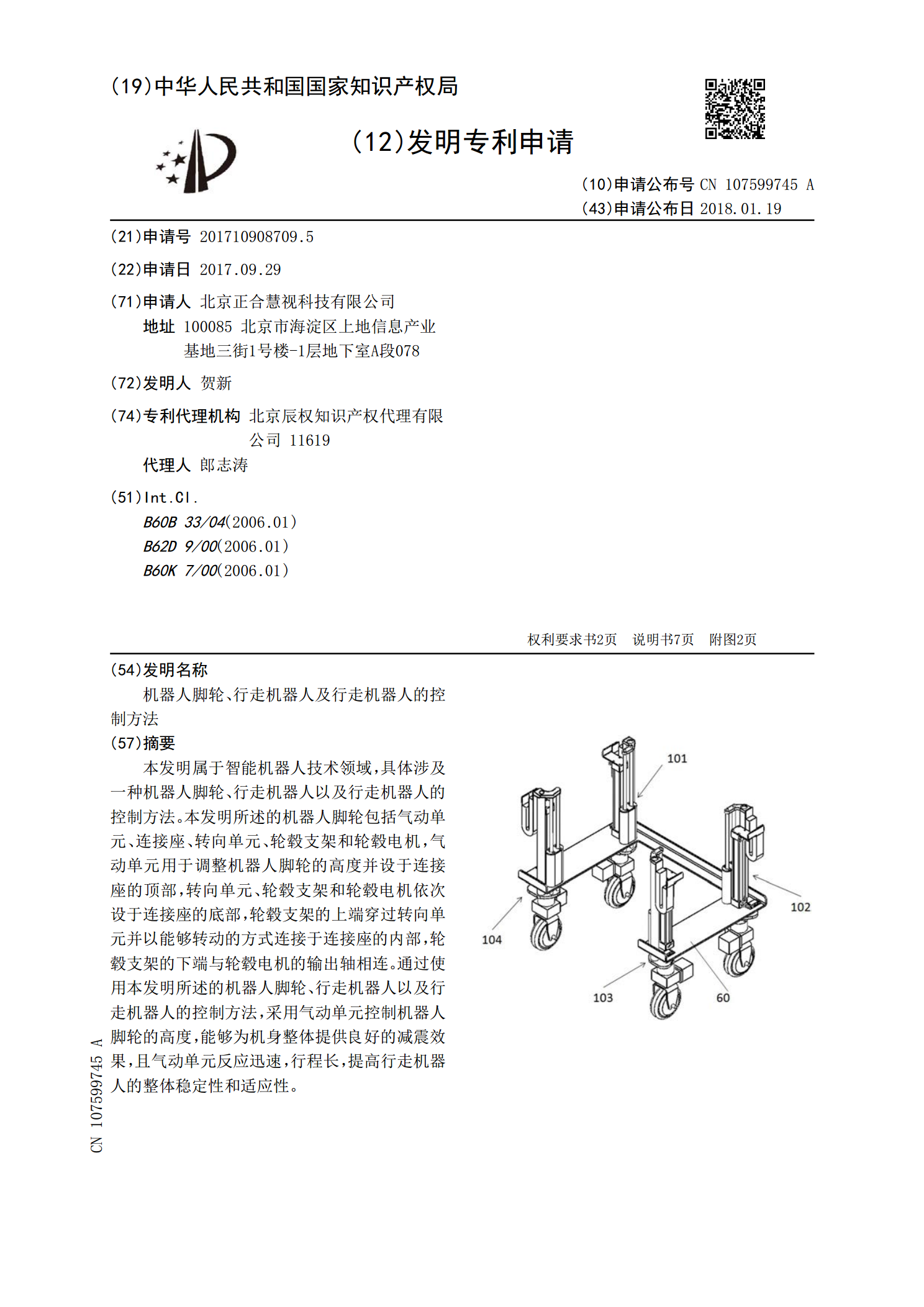
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动

行走机器人及其行走方法.pdf
提供了一种行走机器人及其行走方法。该行走机器人包括行走齿轮、第一齿条、第二齿条以及多个夹爪。第一齿条与行走齿轮啮合,沿行走机器人的行走方向延伸。第二齿条与行走齿轮啮合,与第一齿条平行。在行走齿轮转动的过程中第一齿条和第二齿条能够沿着行走方向朝向相反侧运动。夹爪用于夹持或松开目标对象。多个夹爪中的一个夹爪与第一齿条固定,多个夹爪中的另一个夹爪与第二齿条固定。这样,行走机器人能够具有较短的行走时间,并且具有较高的驱动效率和稳定性。

机器人工件探伤.docx
机器人工件探伤一、直角坐标机器人介绍德国百格拉公司是世界上最闻名的机器人供给商之一,生产多种规格的直线运动单元/导轨、步进电机、交流伺服电机、直线电机和多轴数控系统。以此为基础,在短时间内可提供各种规格的线性导轨、二维、三维标准机器人及用户专用机器人和生产线。这些机器人可以装备焊枪、通用手爪或专用工具,完成焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、喷涂等一系列工作。由于百格拉的导轨、驱动电机、减速机和控制系统等所有部件全部自己生产,使得机器人整体性能更加优异。十多年来