
基于可穿戴设备的辅助骑行增强定位的方法和装置.pdf

一吃****海逸


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于可穿戴设备的辅助骑行增强定位的方法和装置.pdf
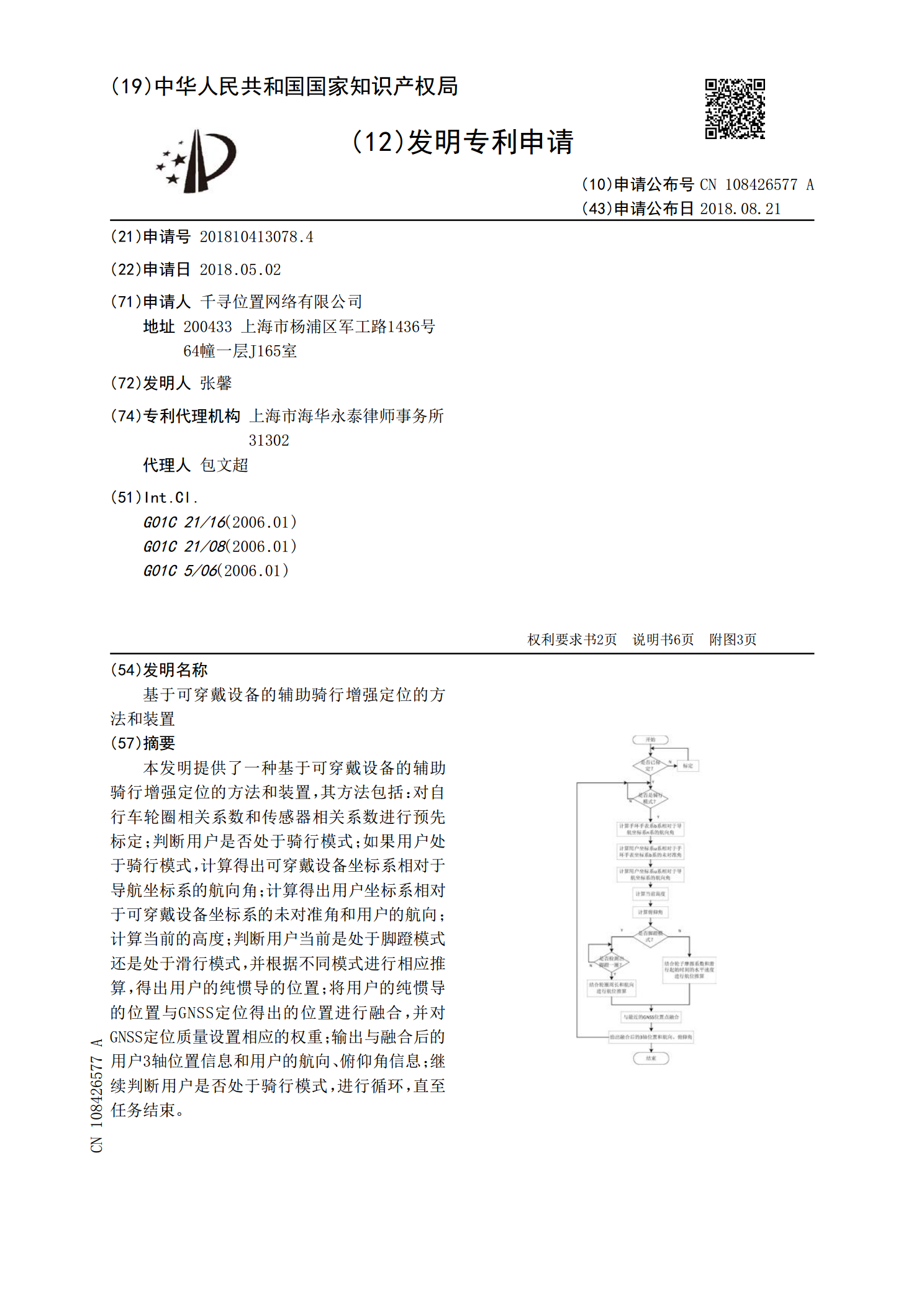
本发明提供了一种基于可穿戴设备的辅助骑行增强定位的方法和装置,其方法包括:对自行车轮圈相关系数和传感器相关系数进行预先标定;判断用户是否处于骑行模式;如果用户处于骑行模式,计算得出可穿戴设备坐标系相对于导航坐标系的航向角;计算得出用户坐标系相对于可穿戴设备坐标系的未对准角和用户的航向;计算当前的高度;判断用户当前是处于脚蹬模式还是处于滑行模式,并根据不同模式进行相应推算,得出用户的纯惯导的位置;将用户的纯惯导的位置与GNSS定位得出的位置进行融合,并对GNSS定位质量设置相应的权重;输出与融合后的用户3轴
基于增强现实的视觉辅助方法及智能穿戴设备.pdf
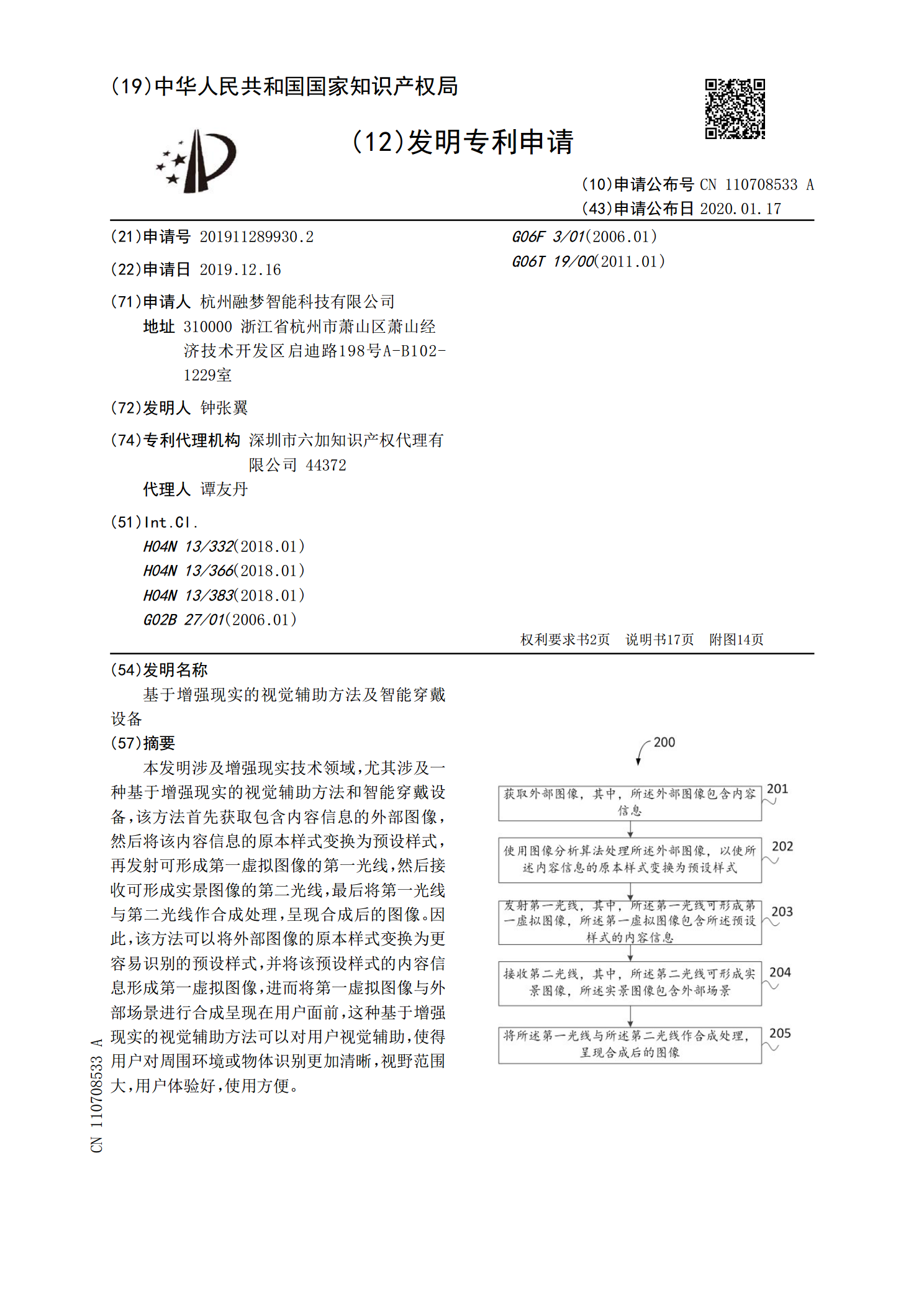
本发明涉及增强现实技术领域,尤其涉及一种基于增强现实的视觉辅助方法和智能穿戴设备,该方法首先获取包含内容信息的外部图像,然后将该内容信息的原本样式变换为预设样式,再发射可形成第一虚拟图像的第一光线,然后接收可形成实景图像的第二光线,最后将第一光线与第二光线作合成处理,呈现合成后的图像。因此,该方法可以将外部图像的原本样式变换为更容易识别的预设样式,并将该预设样式的内容信息形成第一虚拟图像,进而将第一虚拟图像与外部场景进行合成呈现在用户面前,这种基于增强现实的视觉辅助方法可以对用户视觉辅助,使得用户对周围环

基于语义VISLAM和GNSS定位的穿戴式盲人辅助导航装置与方法.pdf
本发明提供一种基于语义SLAM的多传感器融合穿戴式盲人智能辅助导航装置,考虑单一传感器的优点并针对其局限性,提出融合多传感器的SLAM方法,通过融合多传感器的数据,保证了室内外定位的准确性。并且结合语义SLAM可以帮助盲人感知周边环境,并将信息反馈给盲人。留有丰富的视觉信息可供持续开发。本发明中,针对现有视觉SLAM针对在纹理较少的环境中无法进行特征点匹配,从而无法得到三维点在相机坐标系下的深度,我们采用视觉+惯性SLAM算法,可以大大提高算法的稳定性和结果的精确性,使用SLAM方法进行室内定位。
基于可穿戴设备的融合室内定位方法、系统及装置.pdf
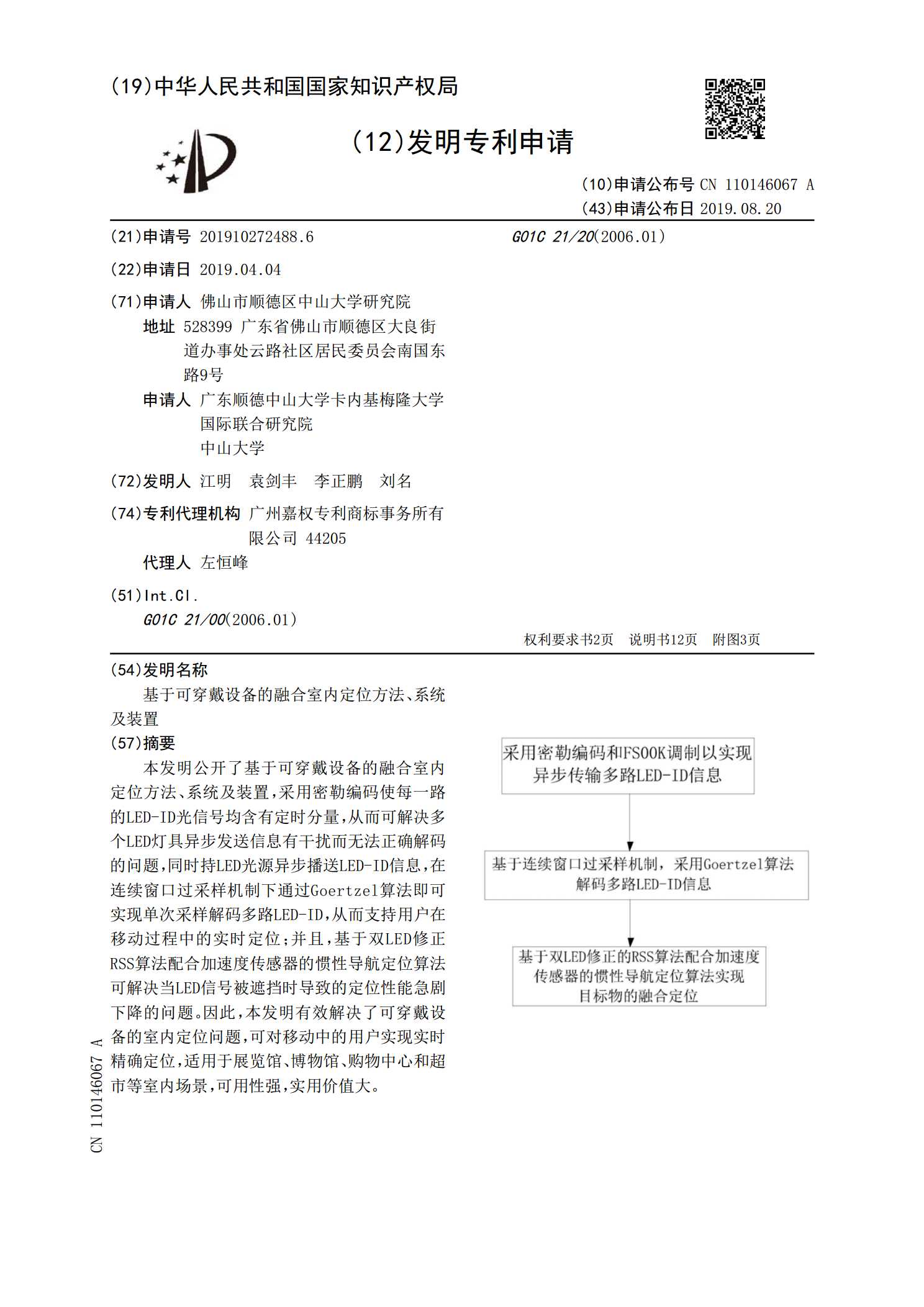
本发明公开了基于可穿戴设备的融合室内定位方法、系统及装置,采用密勒编码使每一路的LED‑ID光信号均含有定时分量,从而可解决多个LED灯具异步发送信息有干扰而无法正确解码的问题,同时持LED光源异步播送LED‑ID信息,在连续窗口过采样机制下通过Goertzel算法即可实现单次采样解码多路LED‑ID,从而支持用户在移动过程中的实时定位;并且,基于双LED修正RSS算法配合加速度传感器的惯性导航定位算法可解决当LED信号被遮挡时导致的定位性能急剧下降的问题。因此,本发明有效解决了可穿戴设备的室内定位问题,

一种辅助定位装置和应用该装置的辅助定位方法.pdf
本发明公开了一种辅助定位装置,用于辅助定位并保证发动机飞轮壳上的孔K1与气缸体上的孔K2的同轴度,该装置包括:定位套,其具有中空凸台,中空凸台外径与气缸体上的孔K2相适配;定位套通过第一螺栓紧固在气缸体上;飞轮壳定位杆,其安装在飞轮壳上的孔K1内,具有杆部和定位凸台,杆部插装在定位套的中空凸台的孔中且定位凸台抵接在定位套的外侧;飞轮壳定位杆通过第二螺栓紧固在气缸盖上。本发明还公开了应用该辅助定位装置的定位方法,可有效保证飞轮壳上的孔K1对气缸体上的孔K2的同轴度能够稳定合格。