
一种砼杆攀爬检修平台.pdf

葫芦****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
砼杆攀爬检修平台.pdf
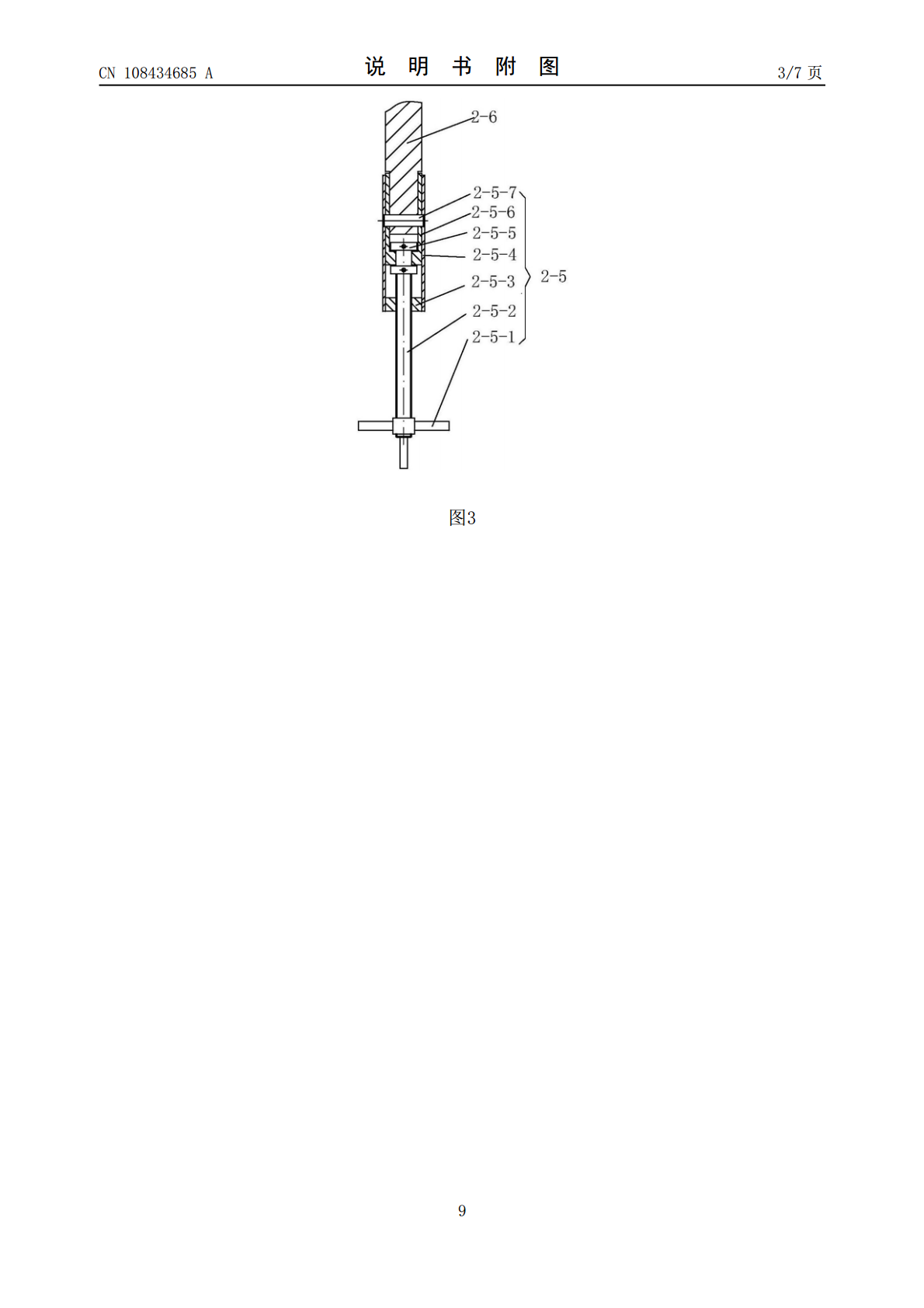
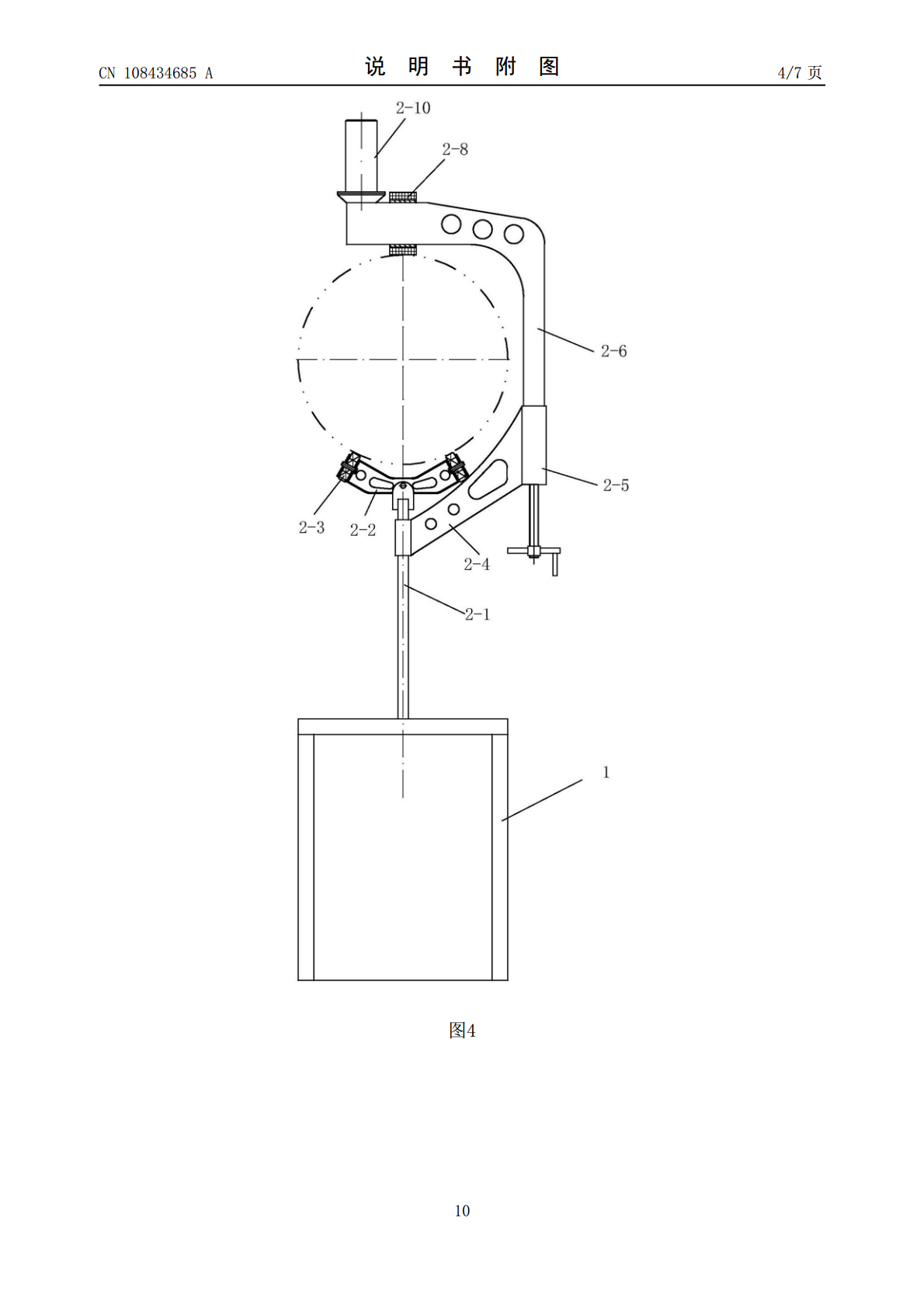
一种砼杆攀爬检修平台,包括作业吊篮、二个以上的纵向行走装置和一个以上的周向旋转装置,所述纵向行走装置具有与作业吊篮连接的主杆,主杆的前端连接有蝶形的辅助轮架以及伸向一侧的固定架,固定架上连接有螺杆锁定机构,螺杆锁定机构的活塞上铰接有向上倾斜且为角形的扣臂,扣臂的端头上设有主行走轮和驱动主行走轮的第一电机减速机构,辅助轮架的两端各设有辅助行走轮,相邻行走装置的主杆之间连接有竖杆;所述周向旋转装置包括两抱臂和支承两抱臂的支撑管以及丝杆调节机构,周向旋转装置的支撑管与竖杆连接。本发明能在砼杆上行走、越障和360
一种砼杆攀爬检修平台.pdf
一种砼杆攀爬检修平台,包括作业吊篮、纵向行走装置和周向旋转装置,所述纵向行走装置具有与作业吊篮连接的主杆,主杆的前端连接有蝶形的辅助轮架以及伸向一侧的固定架,相邻纵向行走装置的固定架的伸向方向相反,固定架上连接有螺杆锁定机构,螺杆锁定机构的活塞上铰接有向上倾斜的扣臂,扣臂的端头上设有主行走轮和驱动主行走轮的第一电机减速机构,辅助轮架的两端各设有辅助行走轮,相邻行走装置的主杆之间连接有竖杆;所述周向旋转装置包括两抱臂和支承两抱臂的支撑管以及主要控制两抱臂开合的丝杆调节机构,周向旋转装置的支撑管与竖杆连接。本
一种砼杆攀爬工作平台及其攀爬装置.pdf
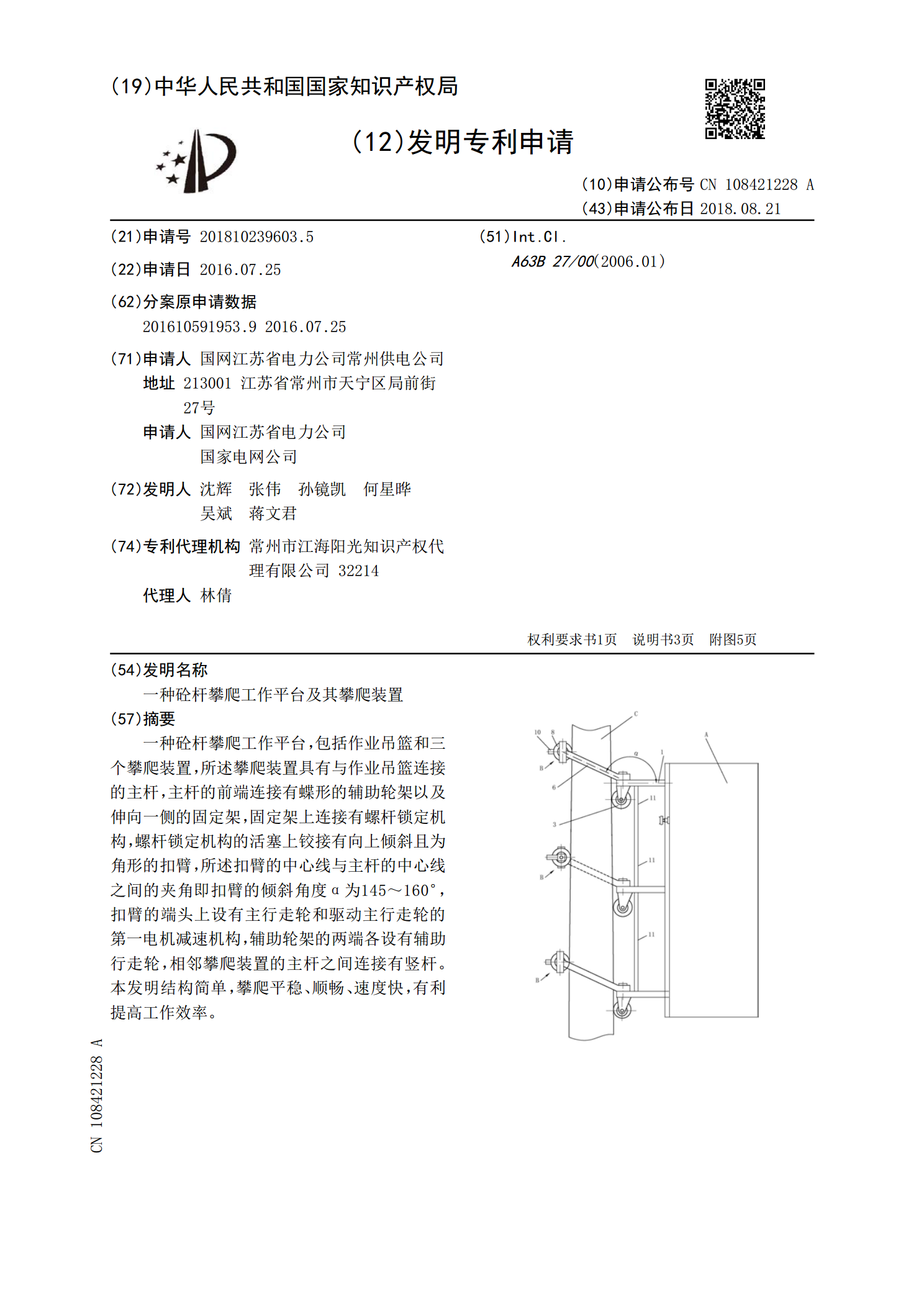
一种砼杆攀爬工作平台,包括作业吊篮和三个攀爬装置,所述攀爬装置具有与作业吊篮连接的主杆,主杆的前端连接有蝶形的辅助轮架以及伸向一侧的固定架,固定架上连接有螺杆锁定机构,螺杆锁定机构的活塞上铰接有向上倾斜且为角形的扣臂,所述扣臂的中心线与主杆的中心线之间的夹角即扣臂的倾斜角度α为145~160︒,扣臂的端头上设有主行走轮和驱动主行走轮的第一电机减速机构,辅助轮架的两端各设有辅助行走轮,相邻攀爬装置的主杆之间连接有竖杆。本发明结构简单,攀爬平稳、顺畅、速度快,有利提高工作效率。

砼杆攀爬工作平台及其攀爬装置.pdf
一种砼杆攀爬工作平台,包括作业吊篮和二个以上的攀爬装置,所述攀爬装置具有与作业吊篮连接的主杆,主杆的前端连接有蝶形的辅助轮架以及伸向一侧的固定架,固定架上连接有螺杆锁定机构,螺杆锁定机构的活塞上铰接有向上倾斜且为角形的扣臂,所述扣臂的中心线与主杆的中心线之间的夹角即扣臂的倾斜角度α为145~160︒,扣臂的端头上设有主行走轮和驱动主行走轮的第一电机减速机构,辅助轮架的两端各设有辅助行走轮,相邻攀爬装置的主杆之间连接有竖杆。本发明结构简单,攀爬平稳、顺畅、速度快,有利提高工作效率。
砼杆检修平台周向旋转装置.pdf
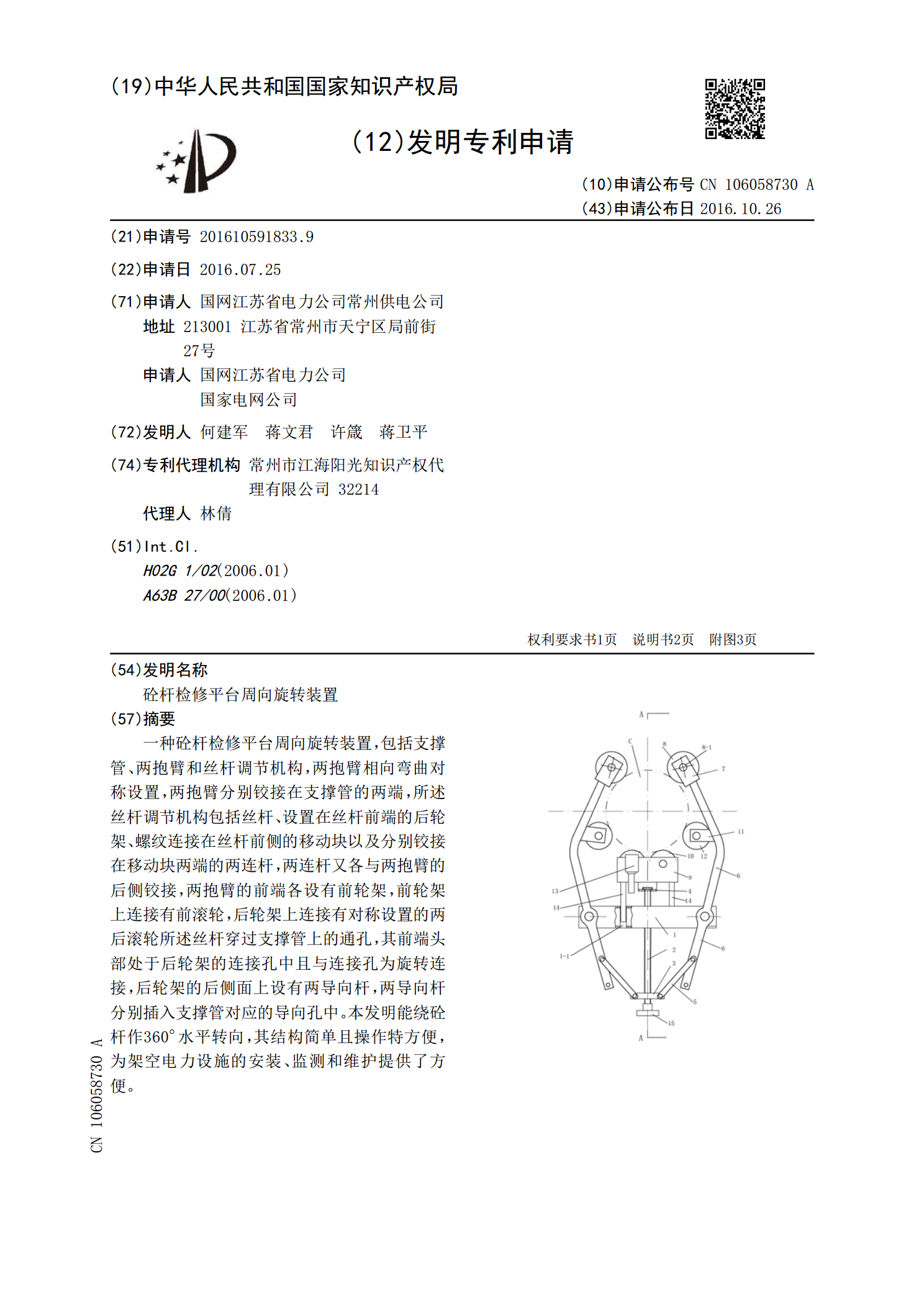
一种砼杆检修平台周向旋转装置,包括支撑管、两抱臂和丝杆调节机构,两抱臂相向弯曲对称设置,两抱臂分别铰接在支撑管的两端,所述丝杆调节机构包括丝杆、设置在丝杆前端的后轮架、螺纹连接在丝杆前侧的移动块以及分别铰接在移动块两端的两连杆,两连杆又各与两抱臂的后侧铰接,两抱臂的前端各设有前轮架,前轮架上连接有前滚轮,后轮架上连接有对称设置的两后滚轮所述丝杆穿过支撑管上的通孔,其前端头部处于后轮架的连接孔中且与连接孔为旋转连接,后轮架的后侧面上设有两导向杆,两导向杆分别插入支撑管对应的导向孔中。本发明能绕砼杆作360°