
一种配合全自动打磨机器人定位工件的装置.pdf

St****36

1/8
2/8

3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

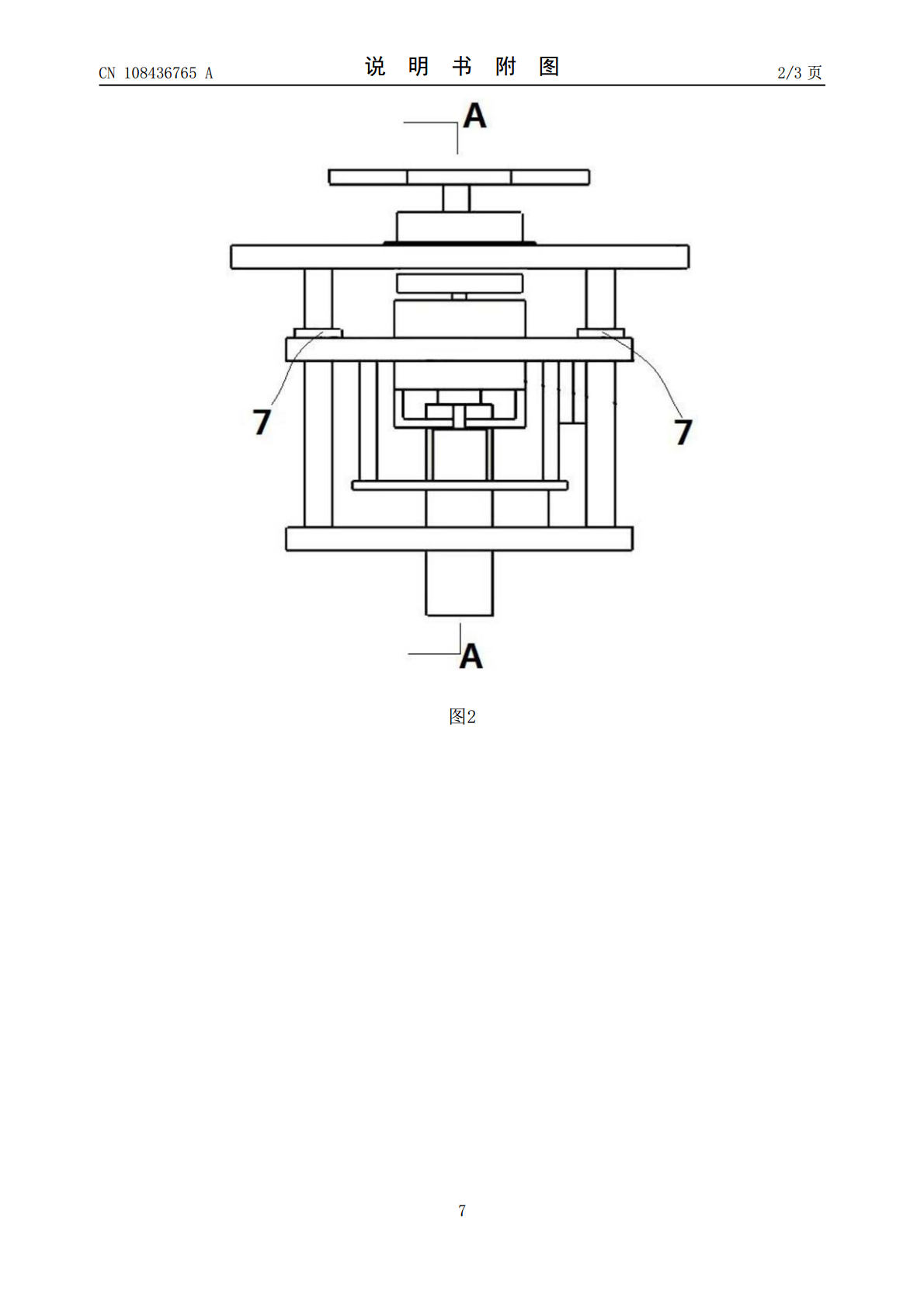
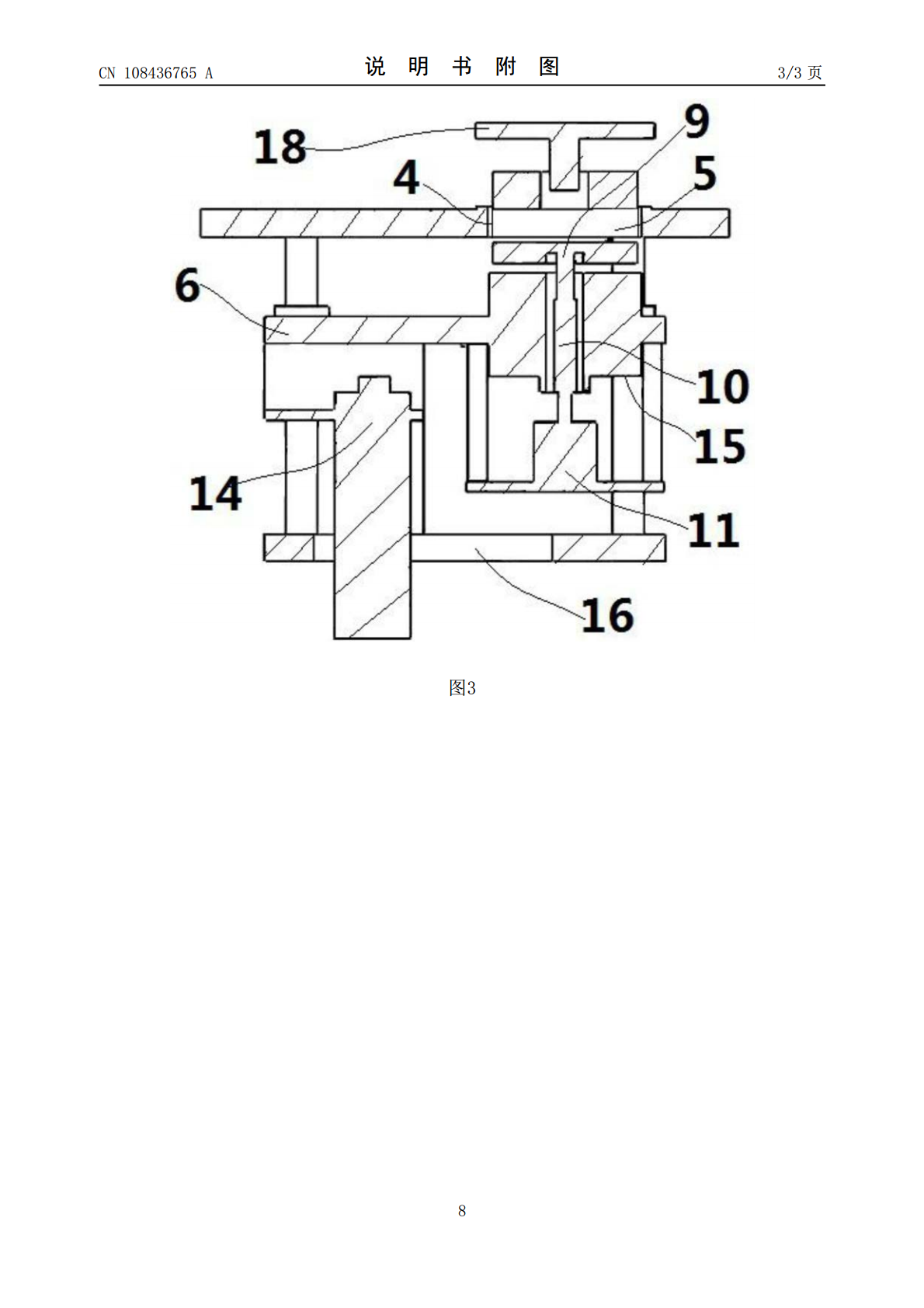
一种配合全自动打磨机器人定位工件的装置.pdf
本发明公开了一种配合全自动打磨机器人定位工件的装置,涉及铸件毛坯技术领域。本发明包括转台上安装板;转台上安装板一表面固定有若干导柱;导柱周侧面与升降安装板滑动配合;升降安装板一表面固定安装有RV型减速机;升降安装板一表面固定安装有电机;电机与电机带轮传动连接;电机带轮与减速机带轮传动连接;减速机与法兰传动连接;导柱底部固定安装有转台下安装板;转台下安装板一表面固定安装有若干组顶升气缸。本发明通过转台上安装板、升降安装板、减速机、转台下安装板、顶升气缸的作用,配合全自动打磨机器人对铸件毛坯件对工件浇冒口和分

一种曲轴自动打磨工件定位装置.pdf
本发明公开了一种曲轴自动打磨工件定位装置,包括固定板,所述固定板的顶部固定连接有操作台,所述固定板底部的两侧均固定连接有支腿,固定板的顶部且位于操作台的左侧固定连接有连接板,固定板的底部且位于两个支腿之间设置有电机,电机的输出轴固定连接有齿轮,齿轮的顶部设置有与齿轮啮合的齿板,且齿板的右端贯穿支腿并延伸至支腿的外部。本发明通过电机的设置,可以带动齿轮转动,通过齿轮与齿板的配合带动移动杆和连接杆移动,通过连接杆和调节板的设置,可以通过固定杆带动夹紧板移动对工件进行定位加工,同时解决了对工件进行打磨加工时无法
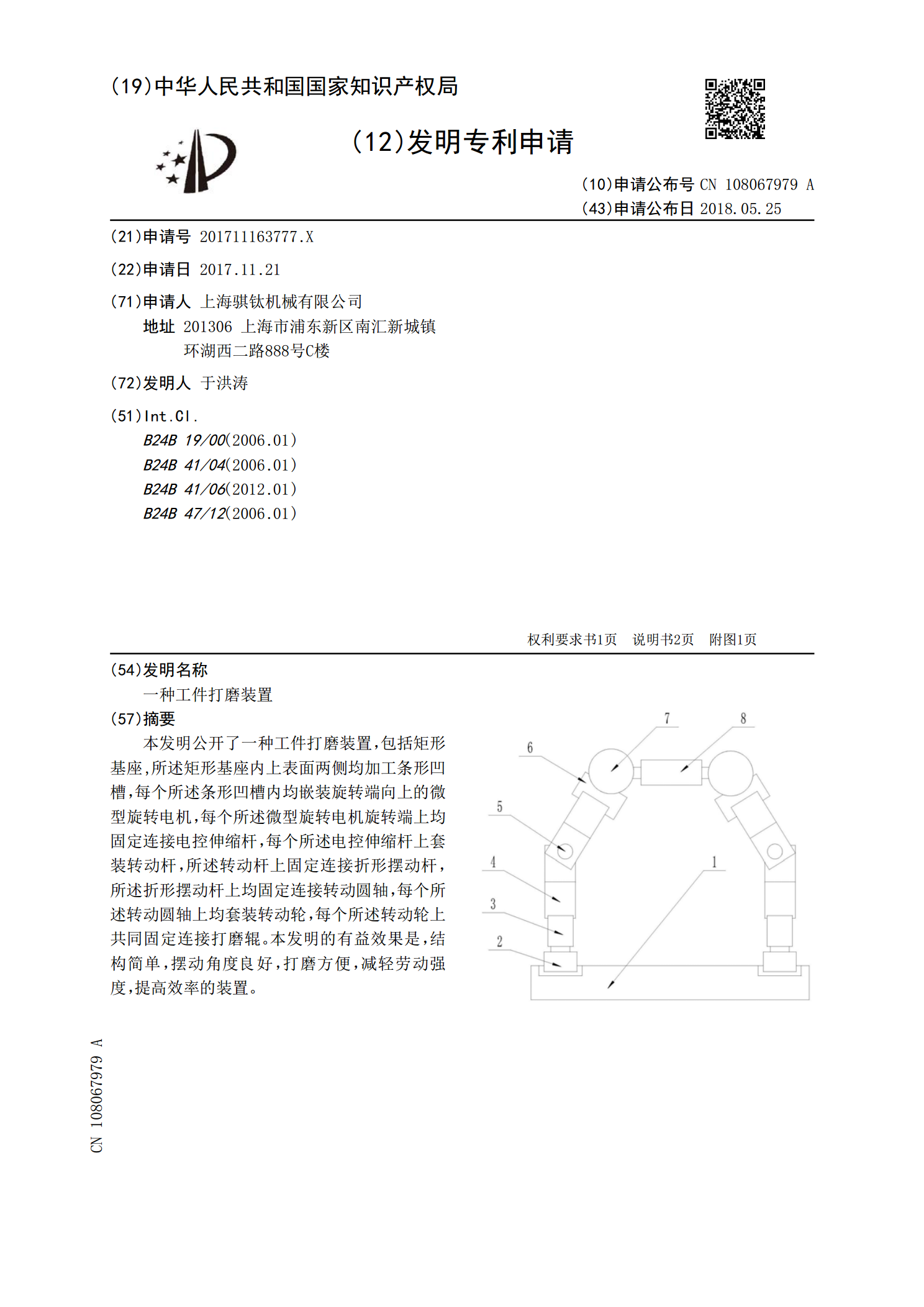
一种工件打磨装置.pdf
本发明公开了一种工件打磨装置,包括矩形基座,所述矩形基座内上表面两侧均加工条形凹槽,每个所述条形凹槽内均嵌装旋转端向上的微型旋转电机,每个所述微型旋转电机旋转端上均固定连接电控伸缩杆,每个所述电控伸缩杆上套装转动杆,所述转动杆上固定连接折形摆动杆,所述折形摆动杆上均固定连接转动圆轴,每个所述转动圆轴上均套装转动轮,每个所述转动轮上共同固定连接打磨辊。本发明的有益效果是,结构简单,摆动角度良好,打磨方便,减轻劳动强度,提高效率的装置。
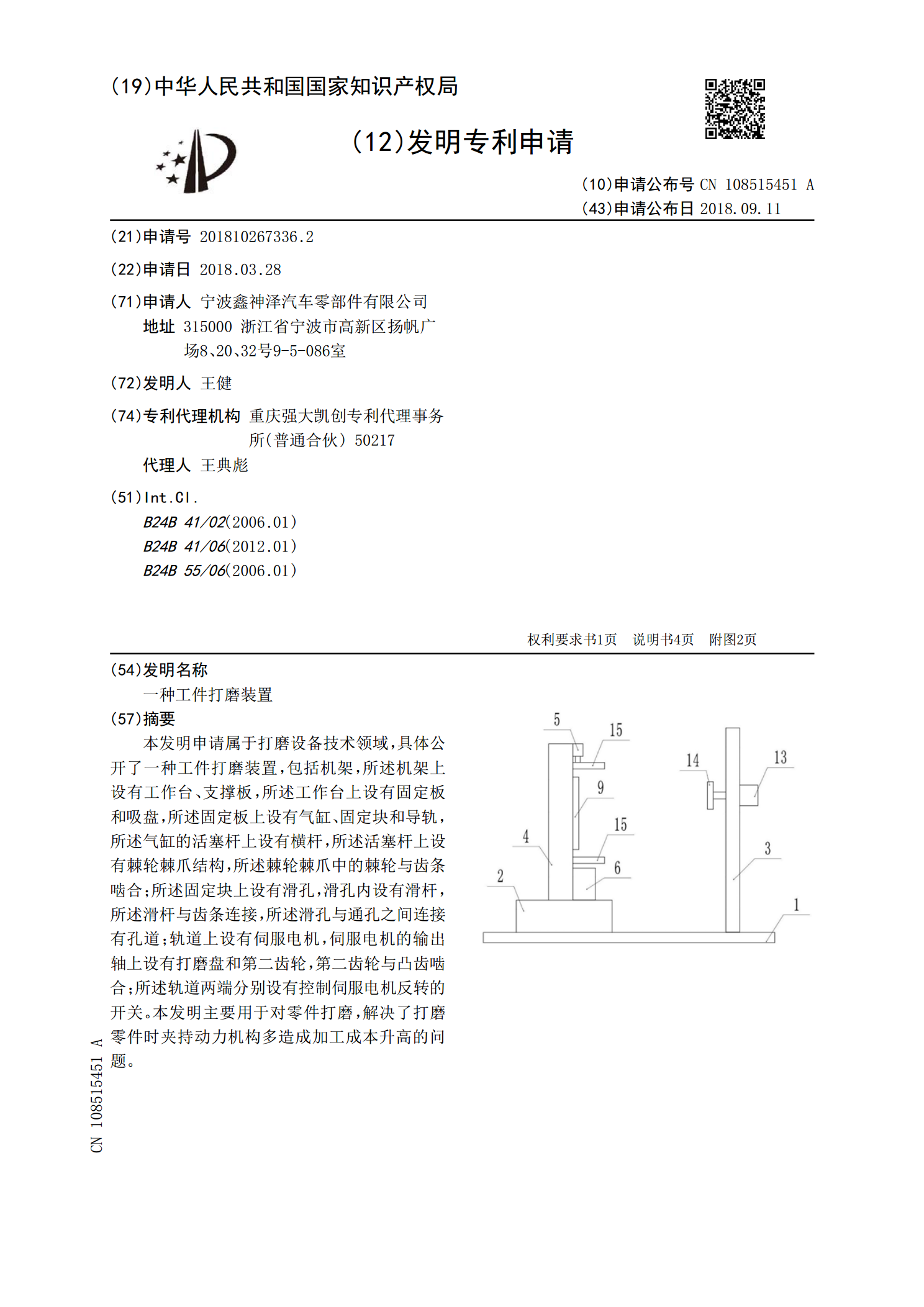
一种工件打磨装置.pdf
本发明申请属于打磨设备技术领域,具体公开了一种工件打磨装置,包括机架,所述机架上设有工作台、支撑板,所述工作台上设有固定板和吸盘,所述固定板上设有气缸、固定块和导轨,所述气缸的活塞杆上设有横杆,所述活塞杆上设有棘轮棘爪结构,所述棘轮棘爪中的棘轮与齿条啮合;所述固定块上设有滑孔,滑孔内设有滑杆,所述滑杆与齿条连接,所述滑孔与通孔之间连接有孔道;轨道上设有伺服电机,伺服电机的输出轴上设有打磨盘和第二齿轮,第二齿轮与凸齿啮合;所述轨道两端分别设有控制伺服电机反转的开关。本发明主要用于对零件打磨,解决了打磨零件时
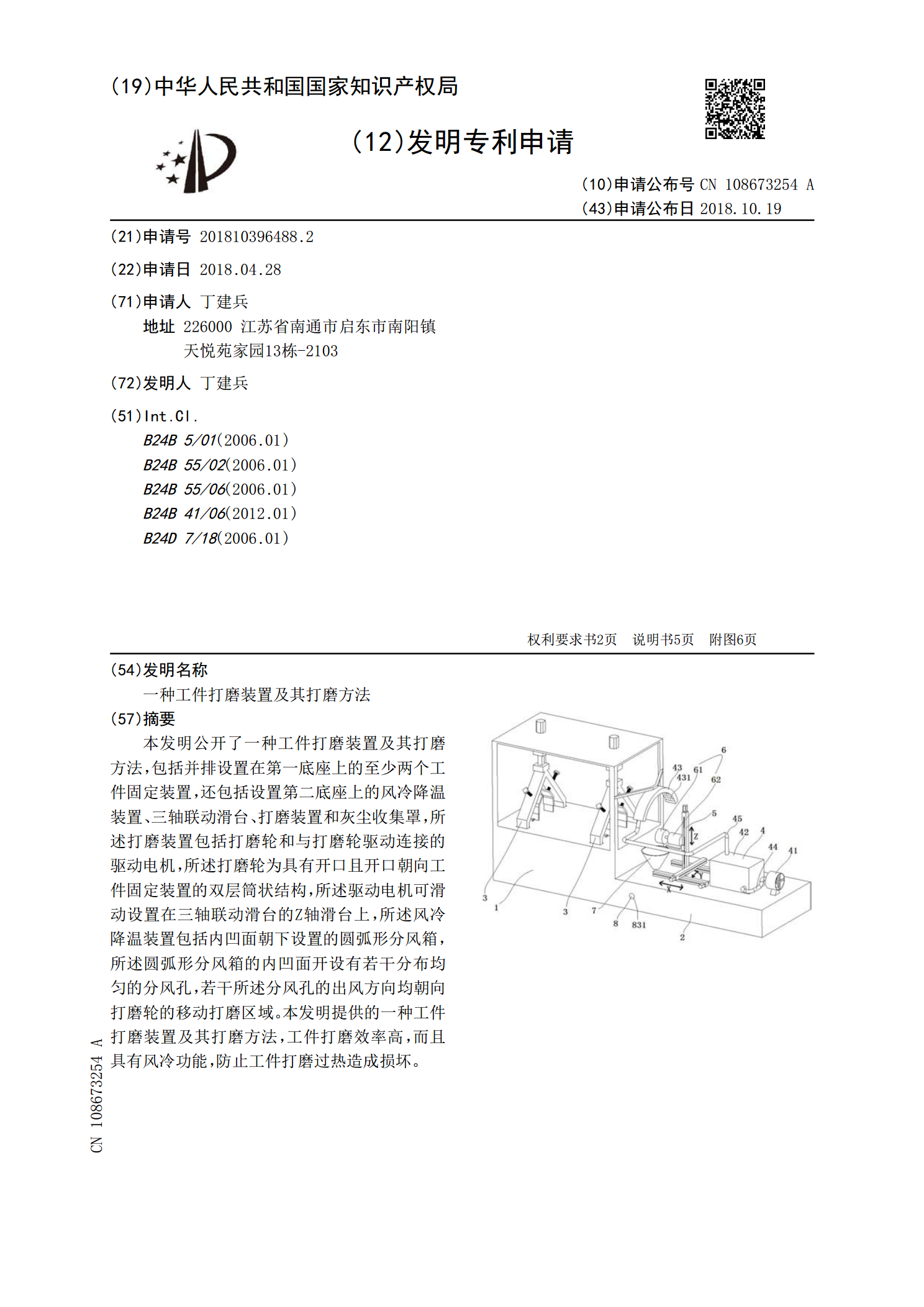
一种工件打磨装置及其打磨方法.pdf
本发明公开了一种工件打磨装置及其打磨方法,包括并排设置在第一底座上的至少两个工件固定装置,还包括设置第二底座上的风冷降温装置、三轴联动滑台、打磨装置和灰尘收集罩,所述打磨装置包括打磨轮和与打磨轮驱动连接的驱动电机,所述打磨轮为具有开口且开口朝向工件固定装置的双层筒状结构,所述驱动电机可滑动设置在三轴联动滑台的Z轴滑台上,所述风冷降温装置包括内凹面朝下设置的圆弧形分风箱,所述圆弧形分风箱的内凹面开设有若干分布均匀的分风孔,若干所述分风孔的出风方向均朝向打磨轮的移动打磨区域。本发明提供的一种工件打磨装置及其打