
一种用于智能制造自动化生产线的多功能工业机器人.pdf

努力****弘毅

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于智能制造自动化生产线的多功能工业机器人.pdf
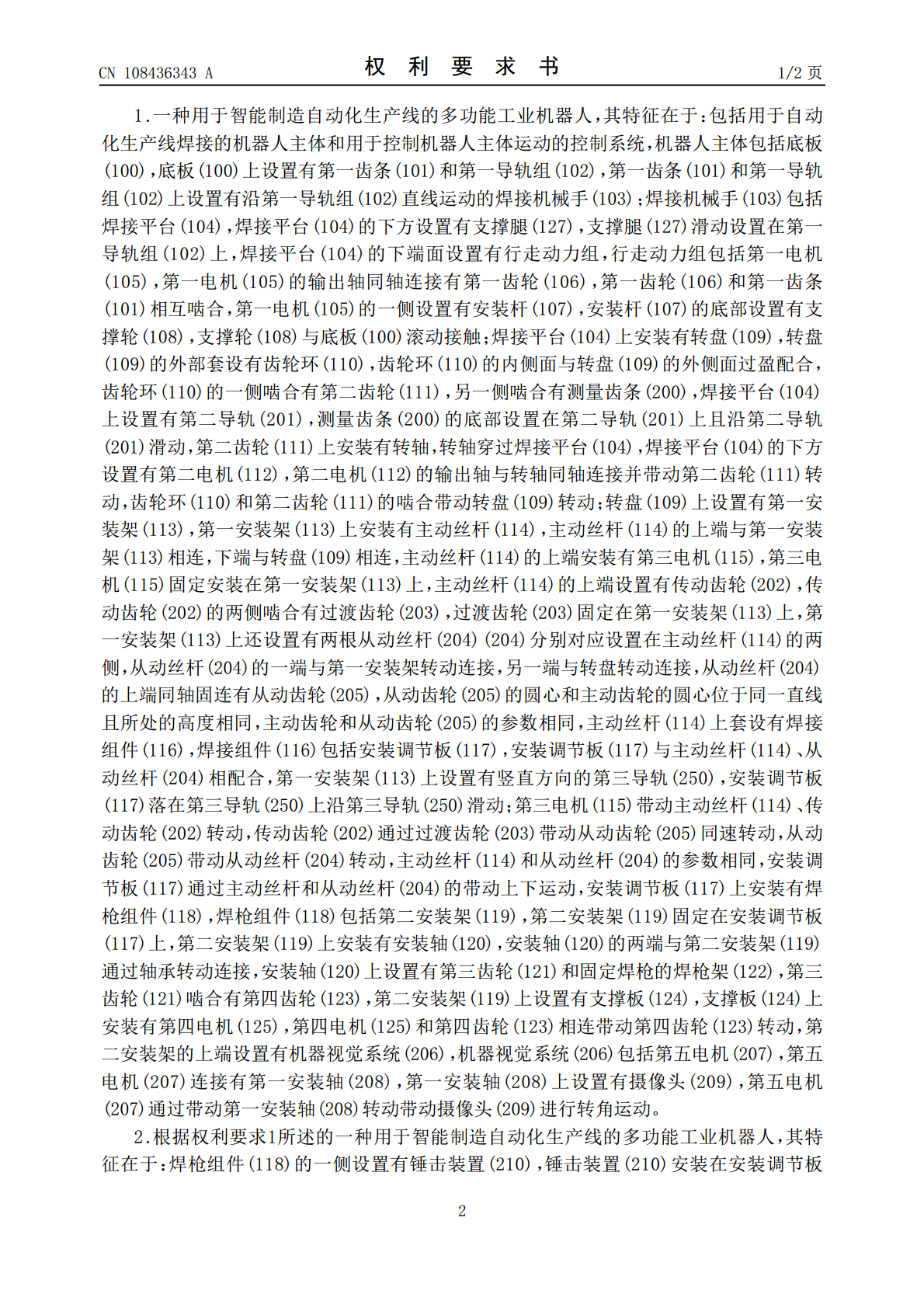
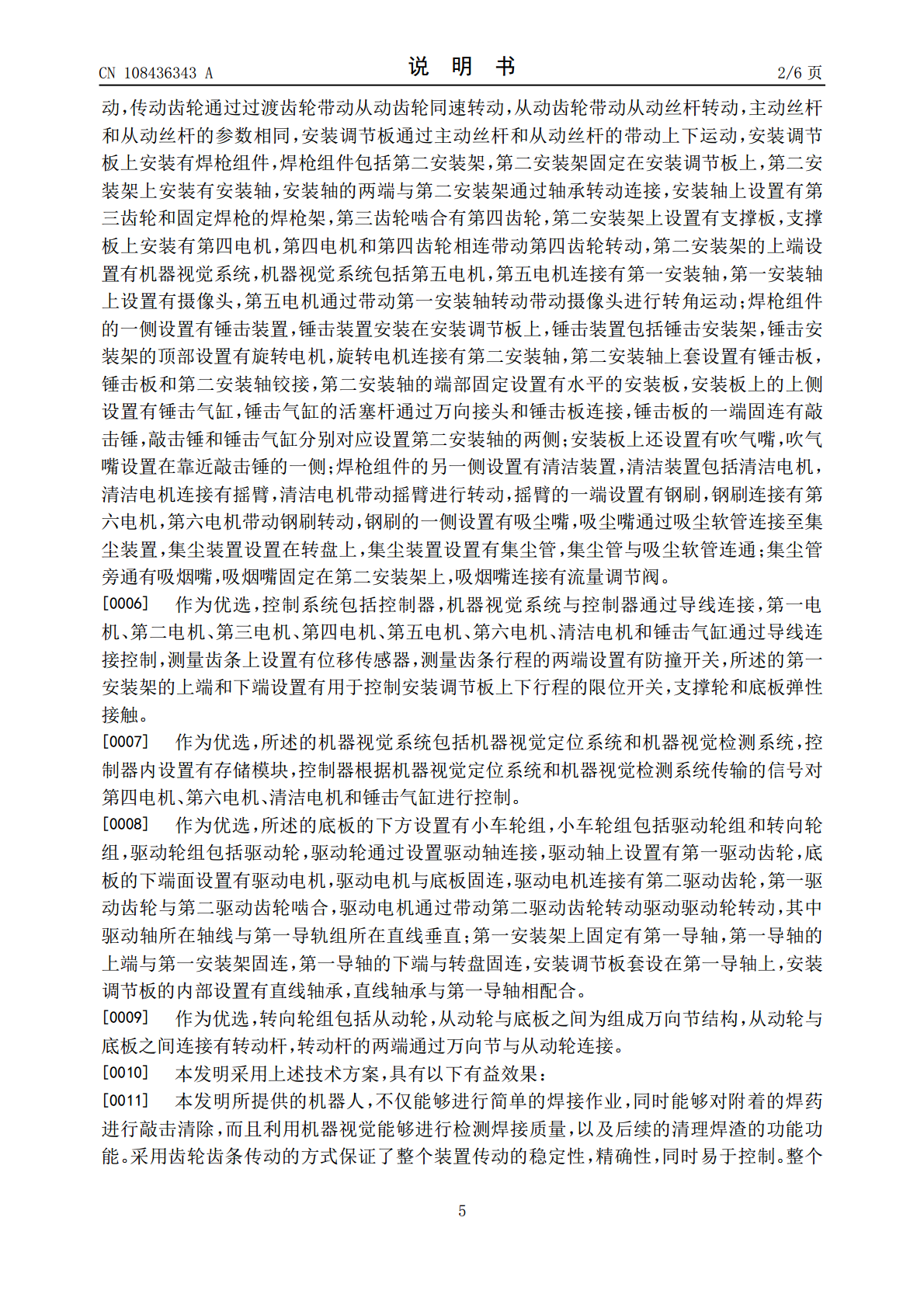
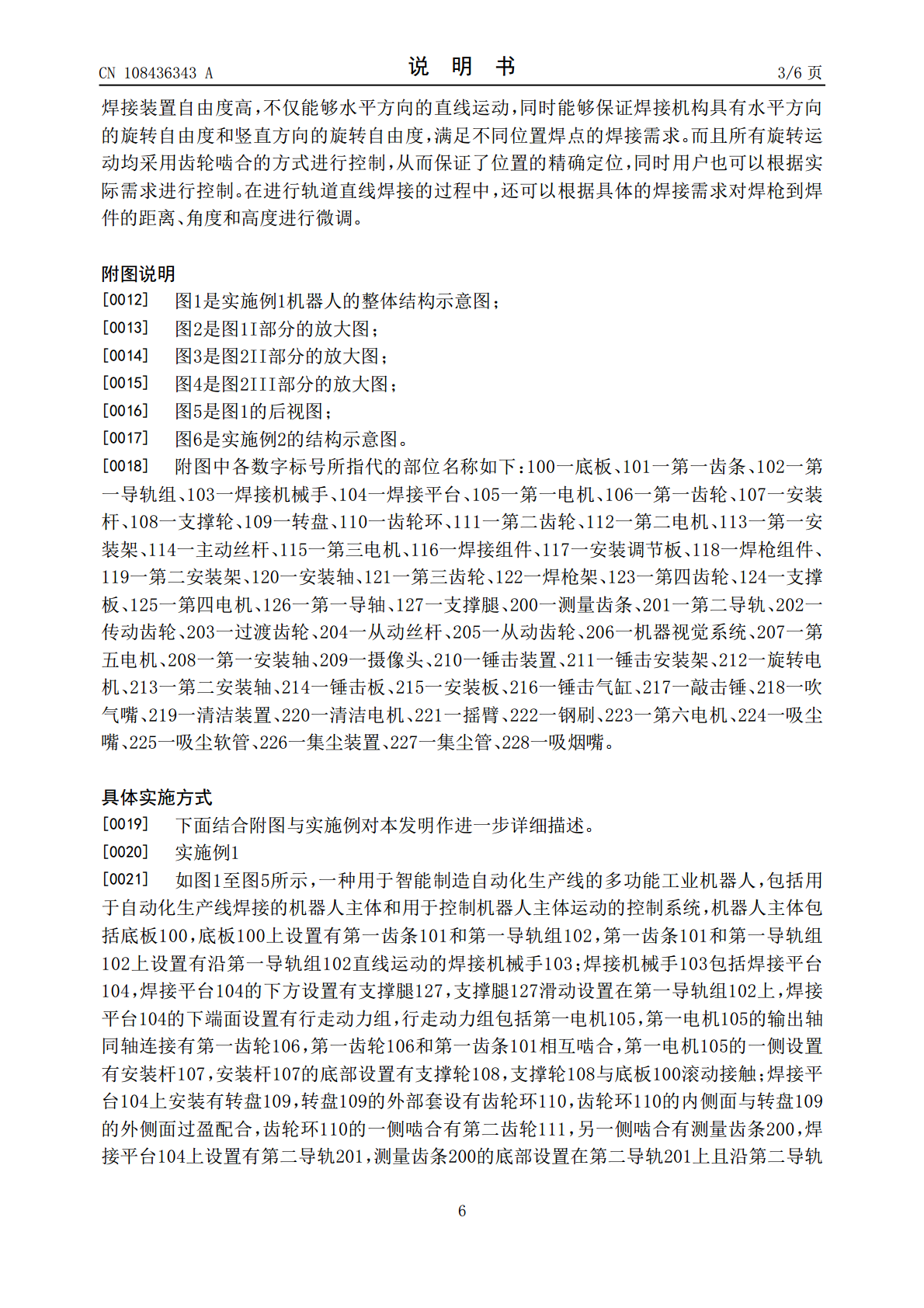
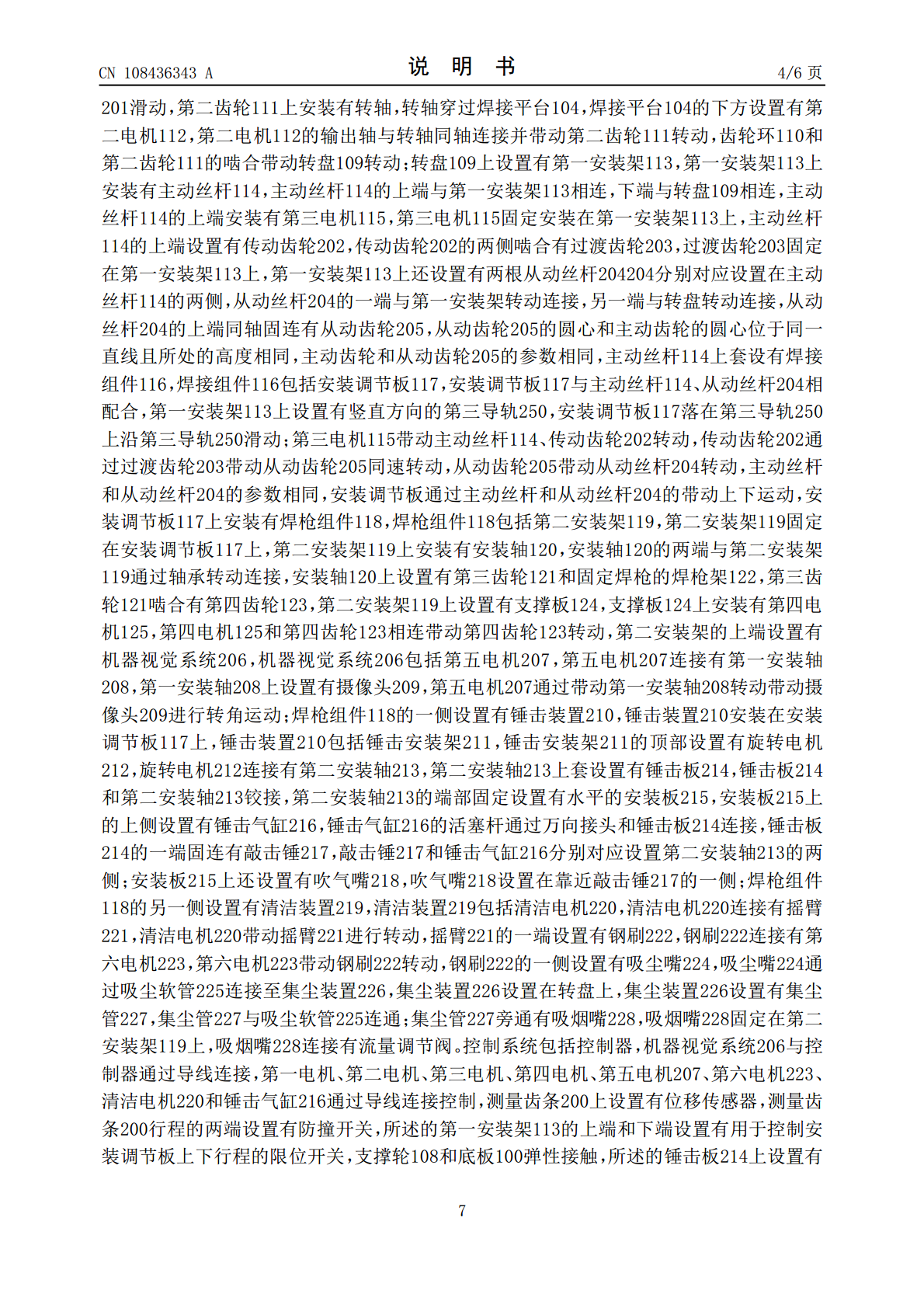
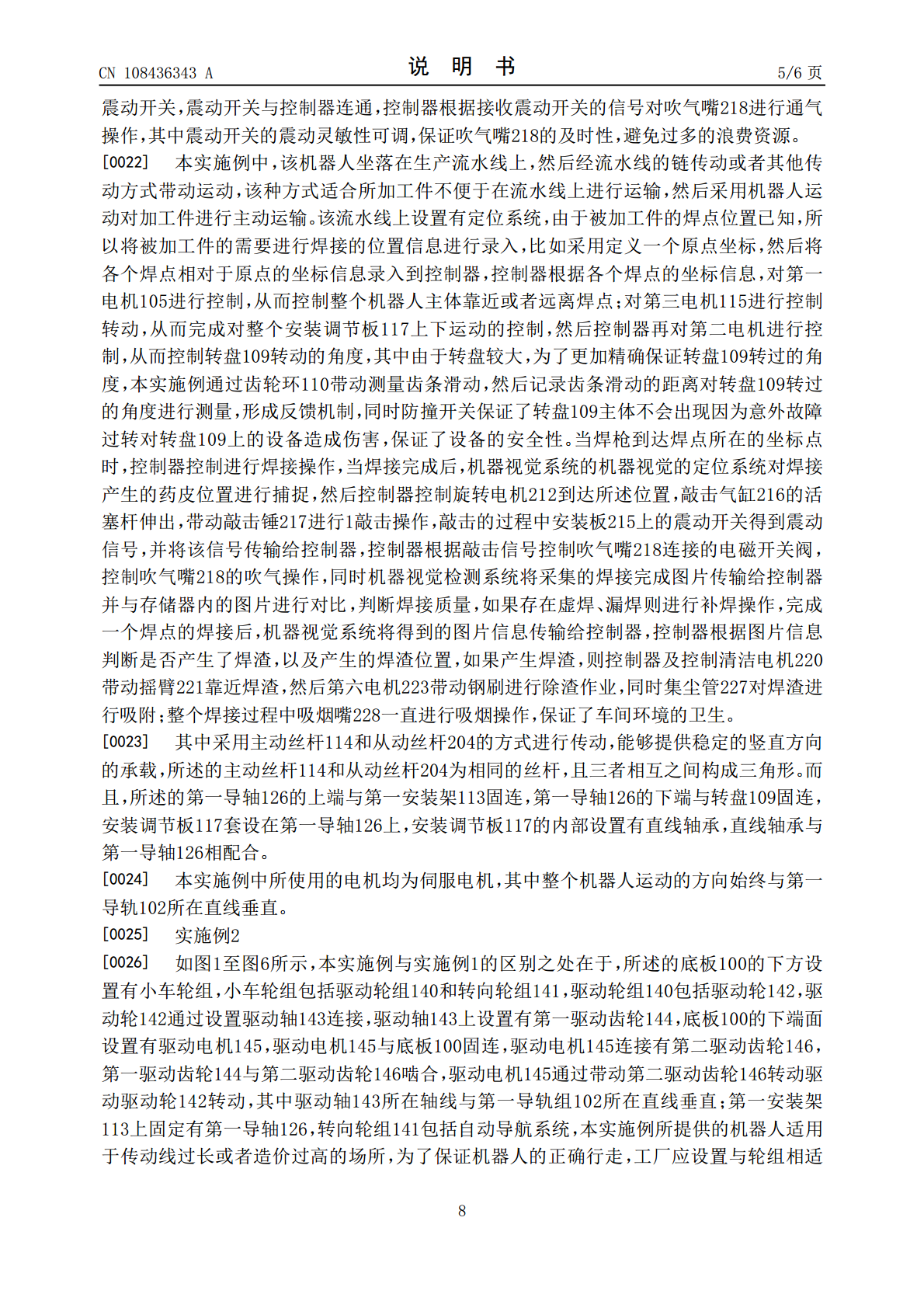
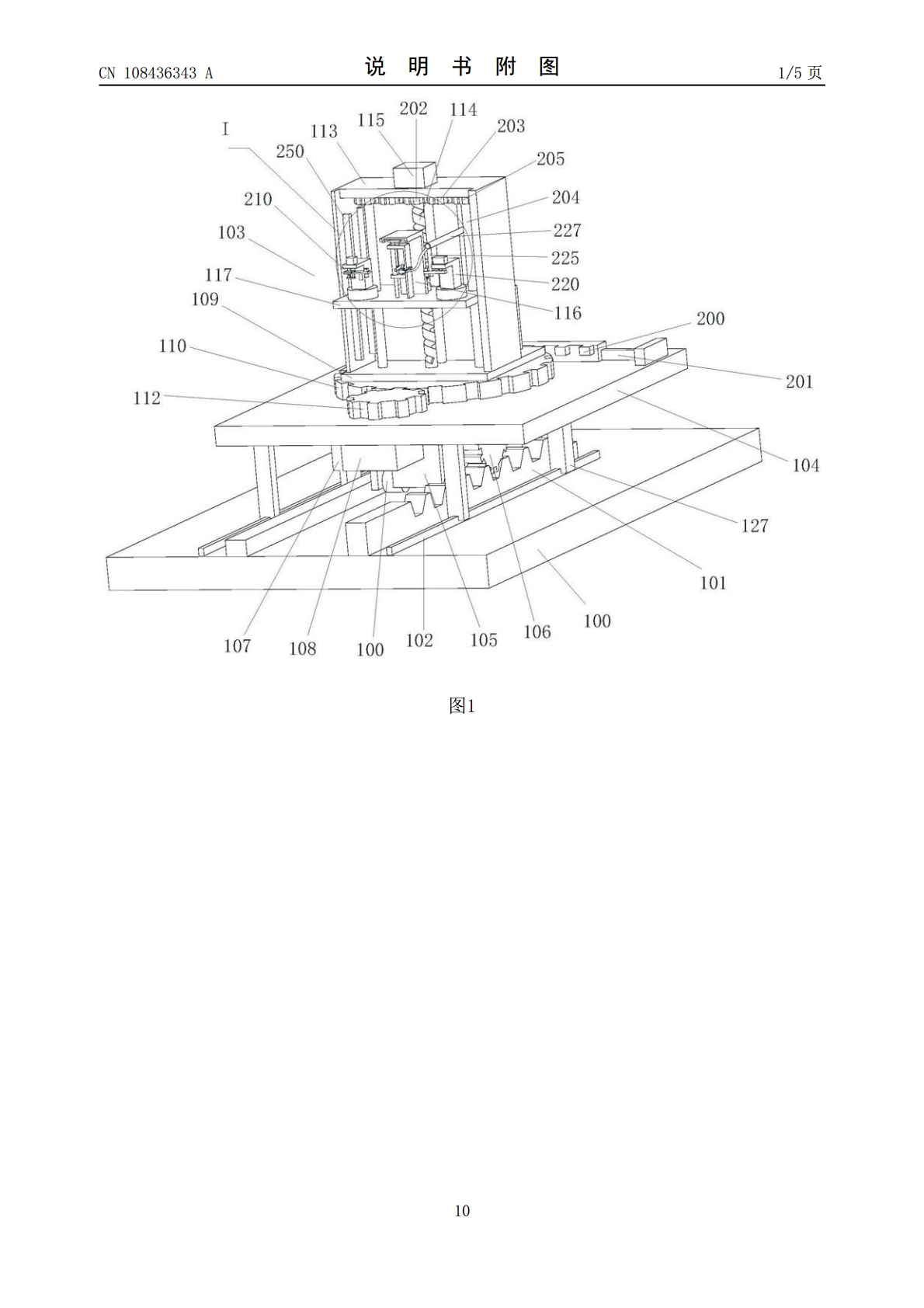
本发明涉及机器人设备领域,公开了一种用于智能制造自动化生产线的多功能工业机器人,其包括底板,底板上固定有焊接机械手,底板的下方设有小车轮组;第一齿条和第一导轨组上设置有沿第一导轨组直线运动的焊接机械手,焊接机械手包括焊接平台,焊接平台的下方设置有支撑腿,支撑腿滑动设置在第一导轨组上,第一电机的输出轴同轴连接有第一齿轮,第一齿轮和第一齿条相互啮合,第一电机的一侧设置有安装杆,安装杆的底部设置有支撑轮,支撑轮与底板滚动接触;焊接平台上安装有转盘,转盘的外部套设有齿轮环,齿轮环的内侧面与转盘的外侧面过盈配合,齿
一种用于工业智能机器人的多功能装置.pdf
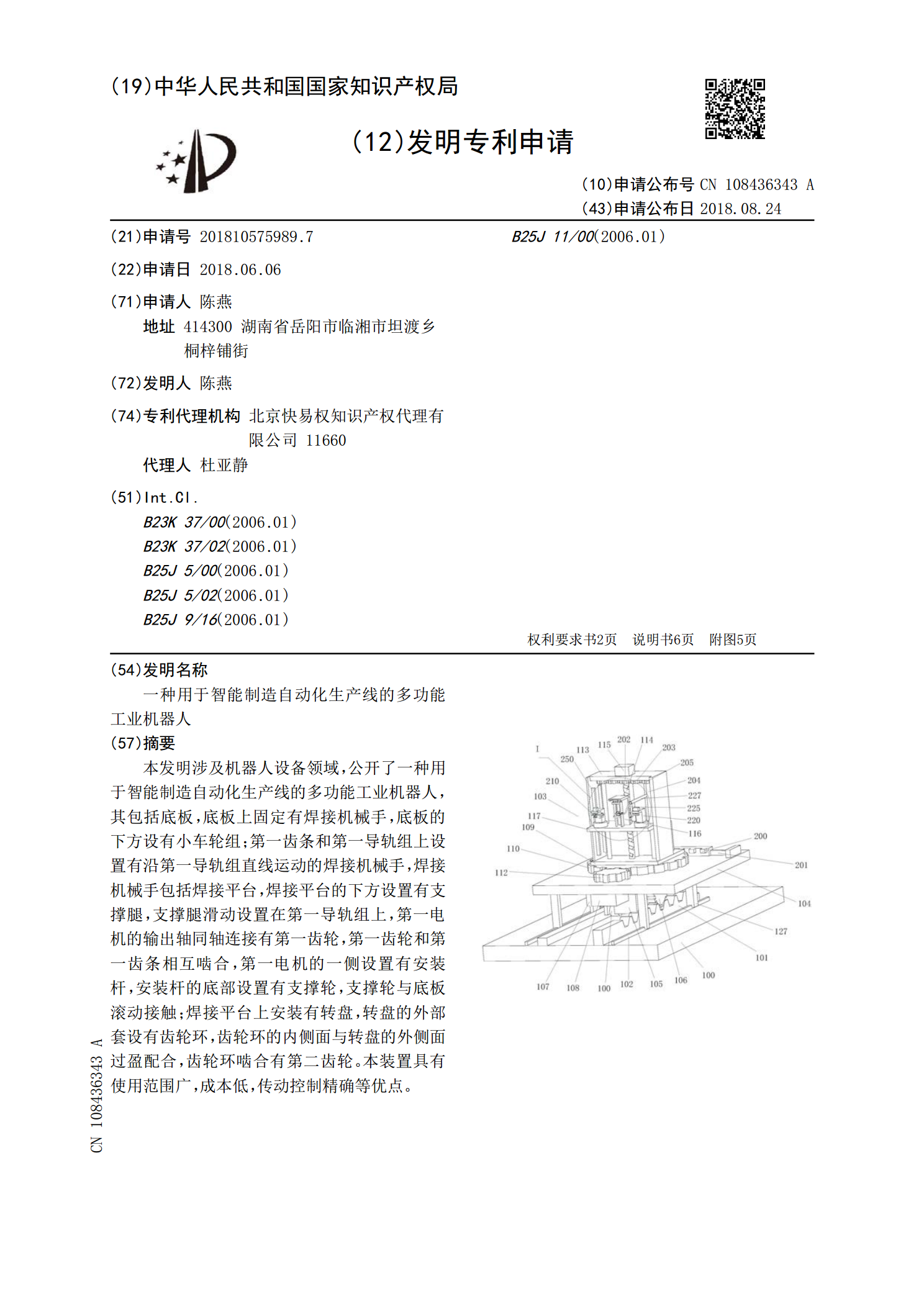
本发明公开了一种用于工业智能机器人的多功能装置,包括装置主体、活动门和装置底座,装置主体的正面活动连接有活动门,装置主体的底部固定连接有连接板,连接板的底部固定连接有装置底座,装置底座的内部底端固定连接有缓震弹簧,缓震弹簧的一侧固定连接有伸缩架,装置底座的底部固定连接有万向轮,装置主体的内部顶部活动连接有可调节压板,可调节压板可固定工业机器人,对工业机器人起到了保护作用,信息记录板提高了装置主体的便捷性,制动板提高了装置主体的安全性,可视窗提高了装置主体的实用性,缓震移动机构提高了装置主体的灵活性,撞击保
基于智能工业机器人的自动化生产线.pdf
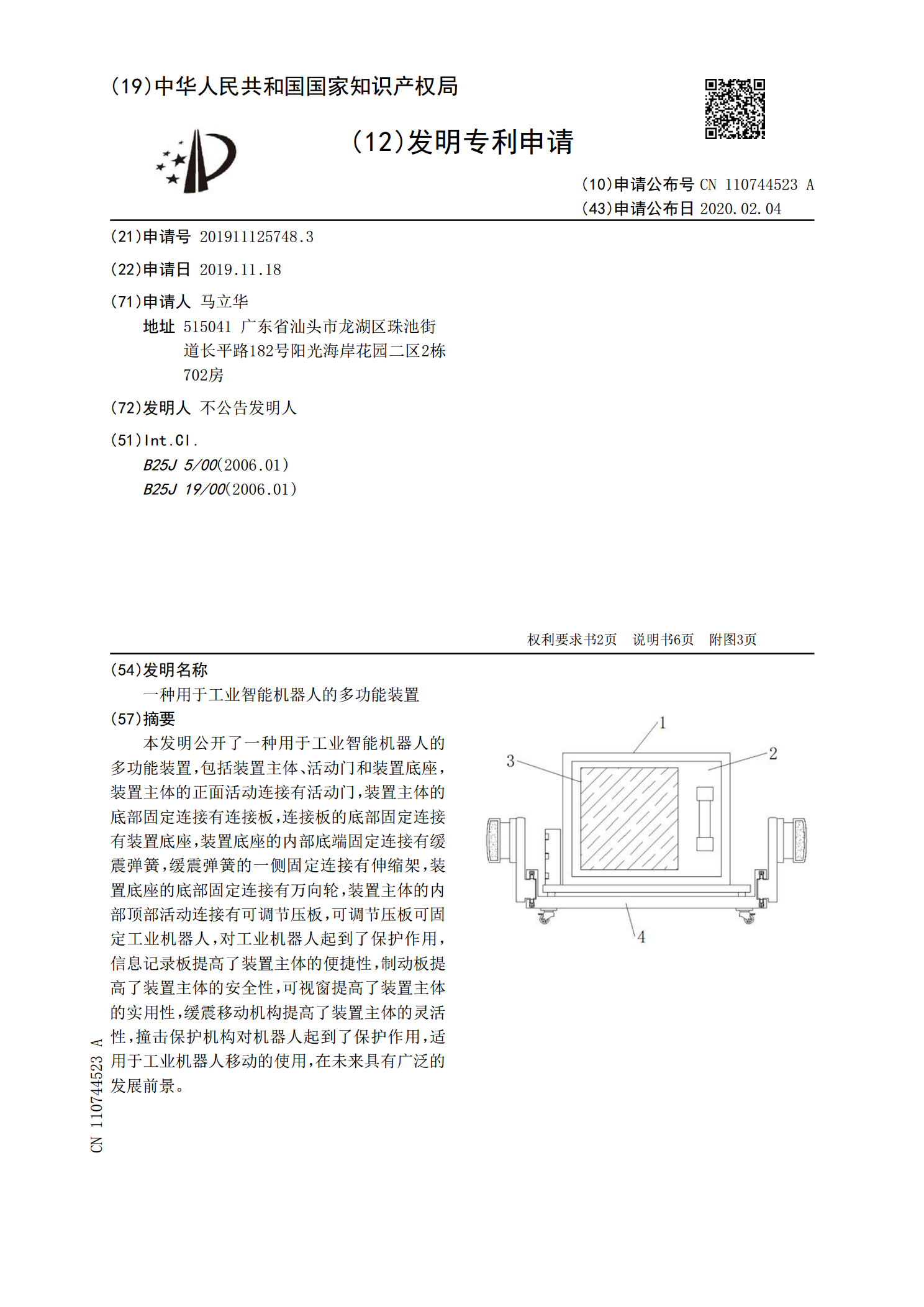
本发明涉及生产线领域,具体地说,涉及一种基于智能工业机器人的自动化生产线,其包括支撑台,支撑台上设有第一支撑杆,第一支撑杆上连接有第二支撑杆,第二支撑杆上设有第一齿条,第一支撑杆上设有第三齿轮,第二支撑杆上铰接有安装座,安装座的下端设有电动工件夹具;工件搬运机构的一侧设有安装台,安装台内设有固定板放置腔,固定板放置腔中设有固定板,固定板放置腔的上方设有移动件放置腔,移动件放置腔中设有第二滚珠螺母座,第二滚珠螺母座两侧设有第二转动杆,移动件放置腔中设有第二丝杆,安装台的上表面设有第三支撑杆。本发明提升了搬运

工业机器人在汽车智能制造生产线中的应用.docx
工业机器人在汽车智能制造生产线中的应用工业机器人在汽车智能制造生产线中的应用摘要:随着汽车工业的快速发展,汽车的生产线也在不断演进和优化。工业机器人作为现代化汽车生产线的核心技术之一,具有高效、精确、稳定等特点,在汽车智能制造生产线中扮演着重要的角色。本文将从工业机器人的发展背景、应用现状、关键技术以及发展趋势等方面进行综述,以期为进一步研究与应用提供参考。关键词:工业机器人、汽车智能制造生产线一、引言随着汽车工业的不断发展,汽车生产线也逐渐变得复杂和庞大。传统的人工操作已经无法满足工业化生产的需求,因此

分析工业机器人的“智能制造”柔性生产线设计.docx
分析工业机器人的“智能制造”柔性生产线设计智能制造是当今工业发展的重要方向,而工业机器人作为智能制造的核心技术之一,在柔性生产线设计中发挥着重要作用。本文将对工业机器人在柔性生产线设计中的应用进行深入分析,并讨论其对制造业的影响。首先,工业机器人在柔性生产线设计中的应用可以显著提高生产效率。工业机器人具有高度灵活的动作能力和精准的操作能力,能够自动完成各种工序,减少了人力操作的需求,大大提高了生产效率。与传统的生产线相比,柔性生产线设计在生产过程中能够根据需要灵活调整机器人的工作顺序和工作内容,快速适应不