
一种轮式移动设备边缘自动制动的方法.pdf

英瑞****写意


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮式移动设备边缘自动制动的方法.pdf
本发明涉及一种轮式移动设备边缘自动制动的方法,利用重力实现自动检测边缘,利用摩擦力实现设备制动,当设备移动至平面边缘时,自动开启的制动机构,实现有效制动以防止设备脱离平面或者从台阶滑落造成危险。
一种轮式机械制动设备.pdf
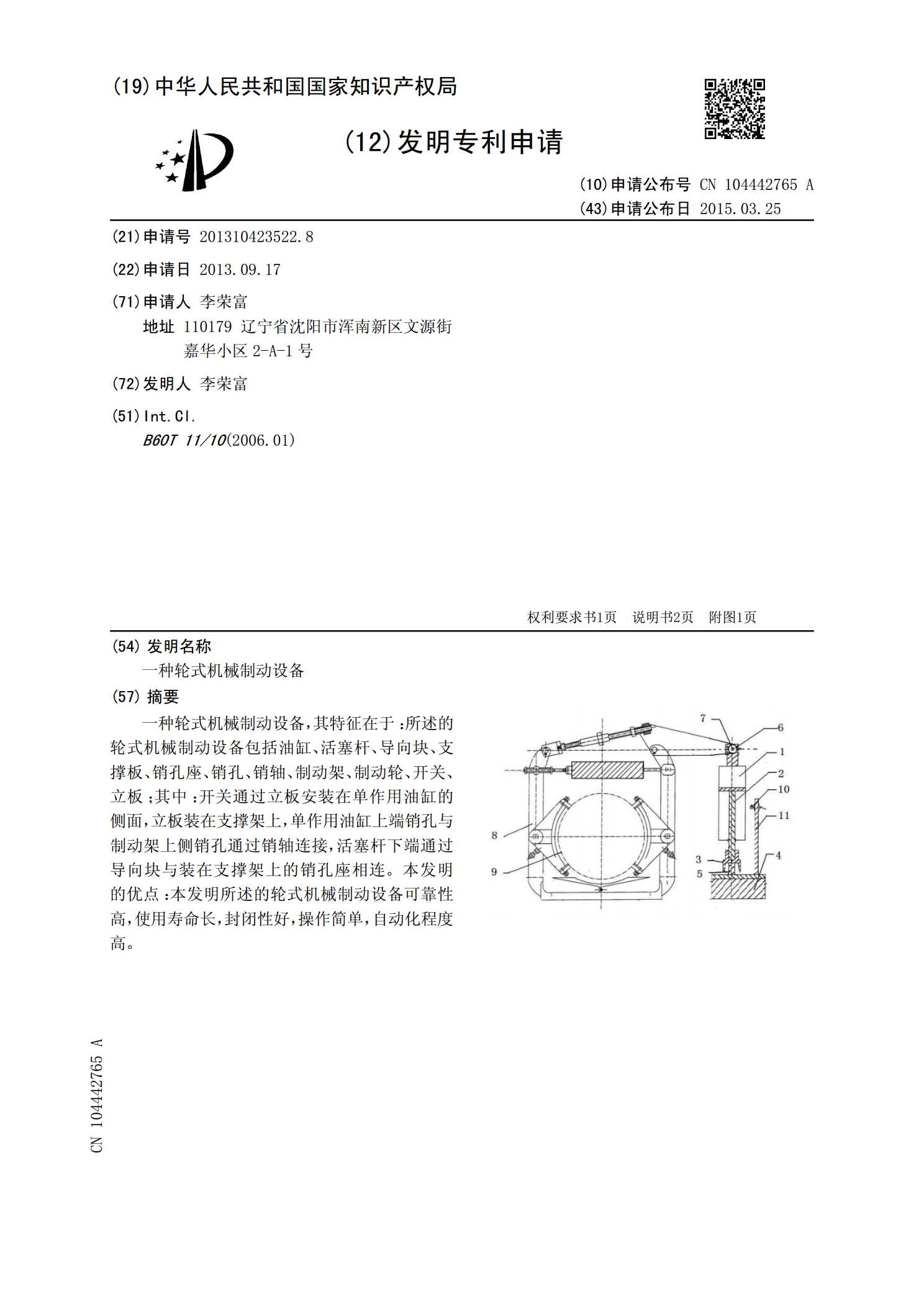
一种轮式机械制动设备,其特征在于:所述的轮式机械制动设备包括油缸、活塞杆、导向块、支撑板、销孔座、销孔、销轴、制动架、制动轮、开关、立板;其中:开关通过立板安装在单作用油缸的侧面,立板装在支撑架上,单作用油缸上端销孔与制动架上侧销孔通过销轴连接,活塞杆下端通过导向块与装在支撑架上的销孔座相连。本发明的优点:本发明所述的轮式机械制动设备可靠性高,使用寿命长,封闭性好,操作简单,自动化程度高。

一种避免电梯意外移动的凸轮式制动装置.pdf
本发明提供了一种避免电梯意外移动的凸轮式制动装置,属于电梯技术领域。它包括固定座、制动板和齿条,固定座固连在电梯轿厢上,齿条竖向设置且固连在固定座上,制动板与驱动源相连接,驱动源固连在电梯轿厢上,且驱动源用于带动制动板相对于齿条进行垂直升降,制动板连接有至少一对凸轮,同一对的两个凸轮对称设置在齿条的两侧,且每个凸轮的偏心轴上同轴固连有齿轮,齿轮与齿条啮合连接。它凸轮贴合在电梯导轨上,在监测到电梯出现意外移动时,驱动源能够带动制动板进行升降,而制动板在升降过程中,由于齿轮啮合连接在齿条上,齿轮随着制动板的升

一种轮式制动器铸造方法.pdf
本发明公开了一种轮式制动器铸造方法,其具体包括以下步骤:1)将砂芯模具放在射芯机上进行合模,以覆膜砂为原料进行射砂,制得砂芯,所述砂芯凸起的圆柱形侧壁上有多个沿圆周方向均匀分布、并用于制备轮式制动器筋条的通孔;2)采用V法铸造工艺制得下砂型和上砂型,所述上砂型上具有浇冒系统;3)将制得的砂芯放置在下砂型上,再将上砂型扣合在下砂型上进行合箱,形成完整的铸型;4)合箱后进行浇铸;5)待冷却后,开箱落砂得到铸件;6)再将铸件进行清理,去除浇注飞边、毛刺,得到轮式制动器成品。本发明采用V法铸造工艺和覆膜砂铸造工艺

移动凸轮式自动托盘库.pdf
本发明公开了一种移动凸轮式自动托盘库,包括:主支撑架组件、气缸驱动组件、防护架组件、凸轮连杆组件及输送组件;所述防护架组件固接于所述主支撑架组件上,所述防护架组件和主支撑架组件中间的空腔形成托盘库,所述输送组件固接于所述主支撑架组件上;所述气缸驱动组件设置于所述托盘库中央的底部。本发明的移动凸轮式自动托盘库,其中的气缸驱动组件和凸轮连杆组件的巧妙结合使得气缸成为了唯一的一个主动件,气缸伸缩杆只需要伸缩的一个来回就可以完成托盘抬放、输送的整个过程。气缸执行速度快,连杆传动效率高,凸轮传动精确,执行机构简单易