
一种智能物流小车.pdf

岚风****55

1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能物流小车.pdf
本发明公开了一种智能物流小车,包括上底板和下底板,上底板的顶端表面中间安装有轴承座,轴承座的外周分布安装有摄像头、稳压模块、开关、二维码模块和显示屏,舵机摆臂的另一端连接有舵机支撑架,舵机支撑架设置有抓取机构,下底板的顶端表面安装有电池和驱动模块,下底板的四角处均设置有电机,电机的输出轴连接有联轴器,联轴器的外周设置有全向轮。本发明小车机械臂由四个数字舵机与多块连接板和支撑板及末端抓取机构构成,每个舵机均牢牢固定在相应位置,结构紧凑,执行可靠,具有多个自由度,能实现无死角抓取,采用两横向两纵向共四个全向轮

一种智能物流小车.pdf
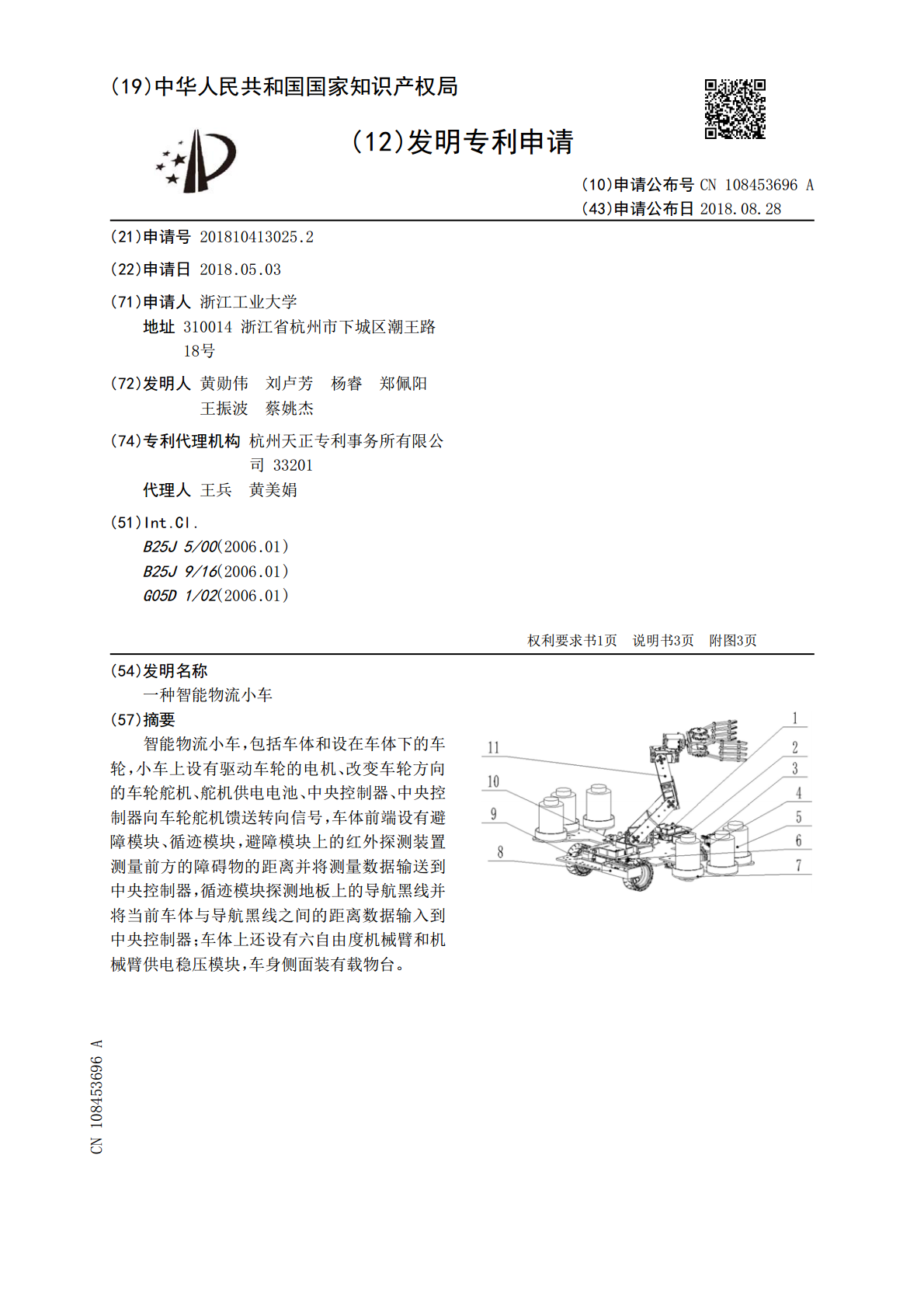
智能物流小车,包括车体和设在车体下的车轮,小车上设有驱动车轮的电机、改变车轮方向的车轮舵机、舵机供电电池、中央控制器、中央控制器向车轮舵机馈送转向信号,车体前端设有避障模块、循迹模块,避障模块上的红外探测装置测量前方的障碍物的距离并将测量数据输送到中央控制器,循迹模块探测地板上的导航黑线并将当前车体与导航黑线之间的距离数据输入到中央控制器;车体上还设有六自由度机械臂和机械臂供电稳压模块,车身侧面装有载物台。
一种智能物流系统的物流小车.pdf
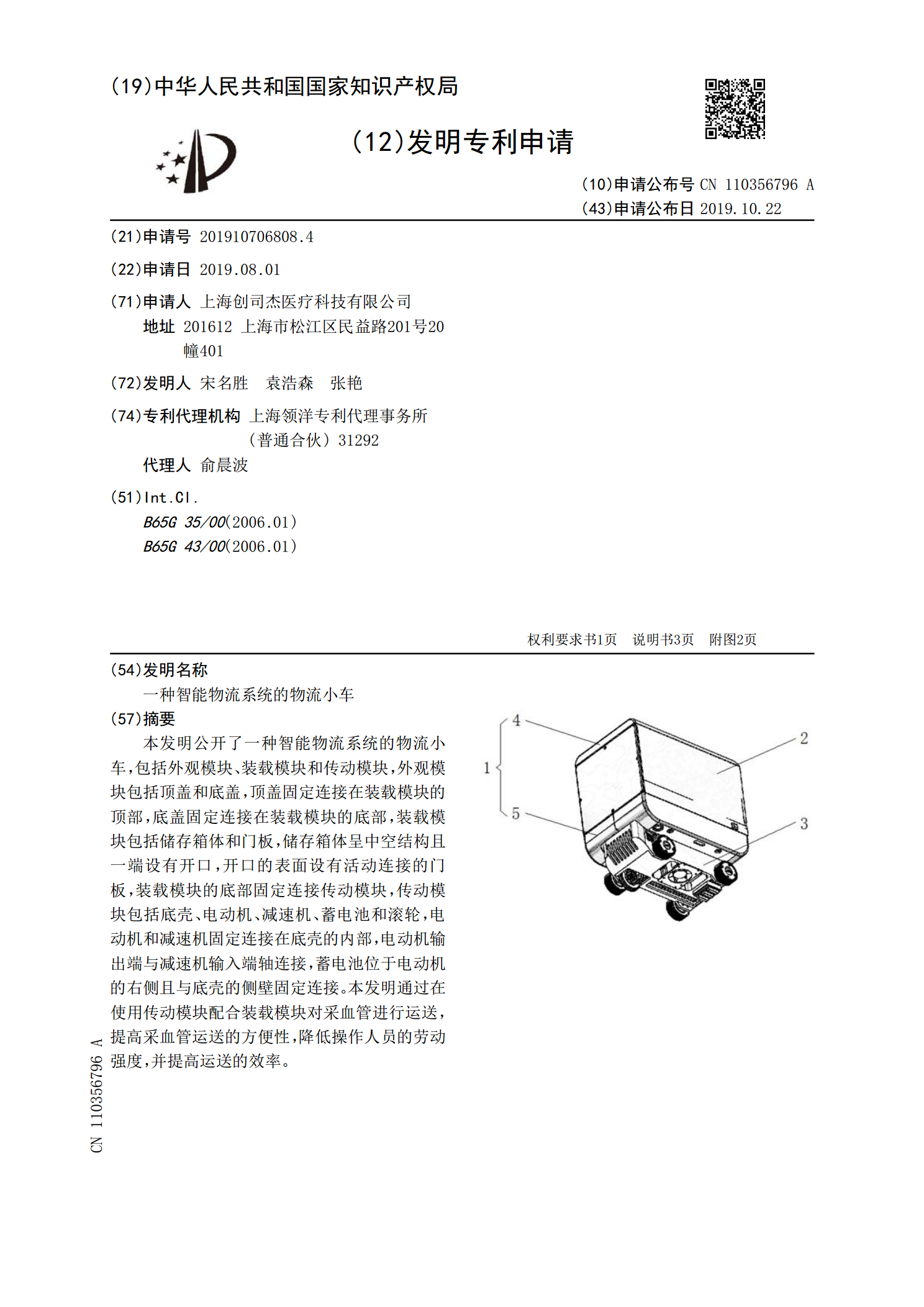
本发明公开了一种智能物流系统的物流小车,包括外观模块、装载模块和传动模块,外观模块包括顶盖和底盖,顶盖固定连接在装载模块的顶部,底盖固定连接在装载模块的底部,装载模块包括储存箱体和门板,储存箱体呈中空结构且一端设有开口,开口的表面设有活动连接的门板,装载模块的底部固定连接传动模块,传动模块包括底壳、电动机、减速机、蓄电池和滚轮,电动机和减速机固定连接在底壳的内部,电动机输出端与减速机输入端轴连接,蓄电池位于电动机的右侧且与底壳的侧壁固定连接。本发明通过在使用传动模块配合装载模块对采血管进行运送,提高采血管

一种小区智能物流小车.pdf
本发明涉及物流运输领域,具体公开了一种小区智能物流小车,包括底座、电源、光电传感器、机械手、履带装置、驱动电机、控制板和驱动模块;所述底座包括底板与垂直安装在底板两侧的侧板;所述履带装置包括履带、驱动轮和承重轮,所述驱动轮安装在侧板的前端;所述承重轮安装在侧板的后端和底端;所述驱动电机安装在侧板上,所述驱动电机与驱动轮连接;所述电源、控制板和驱动模块依次安装在底板上,所述电源分别与控制板和驱动模块连接并供电,所述控制板与驱动模块信号连接;所述光电传感器安装在底板上;所述机械手安装在底板前端。本发明的小区智
一种智能快递物流运输小车.pdf
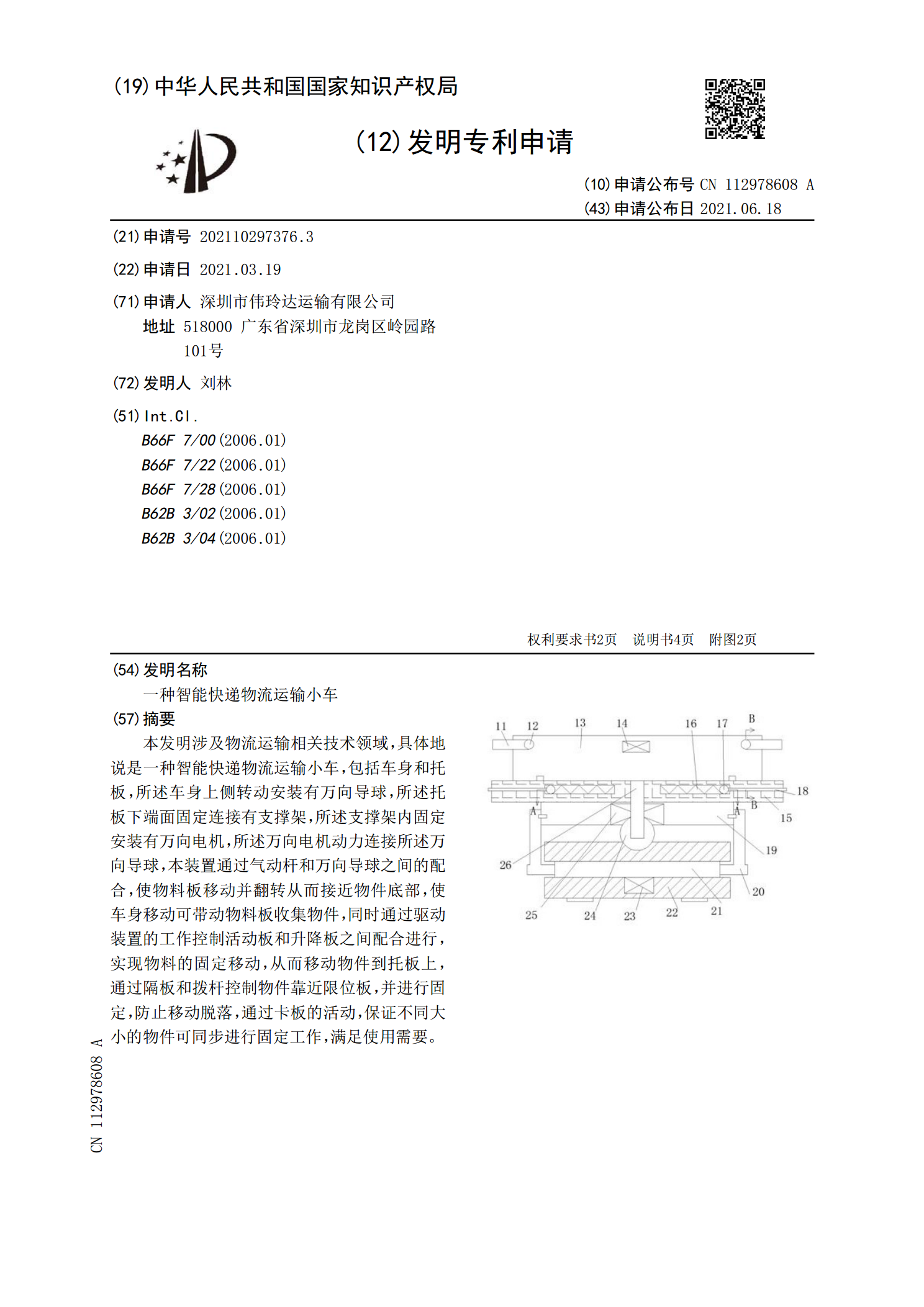
本发明涉及物流运输相关技术领域,具体地说是一种智能快递物流运输小车,包括车身和托板,所述车身上侧转动安装有万向导球,所述托板下端面固定连接有支撑架,所述支撑架内固定安装有万向电机,所述万向电机动力连接所述万向导球,本装置通过气动杆和万向导球之间的配合,使物料板移动并翻转从而接近物件底部,使车身移动可带动物料板收集物件,同时通过驱动装置的工作控制活动板和升降板之间配合进行,实现物料的固定移动,从而移动物件到托板上,通过隔板和拨杆控制物件靠近限位板,并进行固定,防止移动脱落,通过卡板的活动,保证不同大小的物件