
机器人滑觉传感器ppt课件.ppt

天马****23


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人滑觉传感器ppt课件.ppt
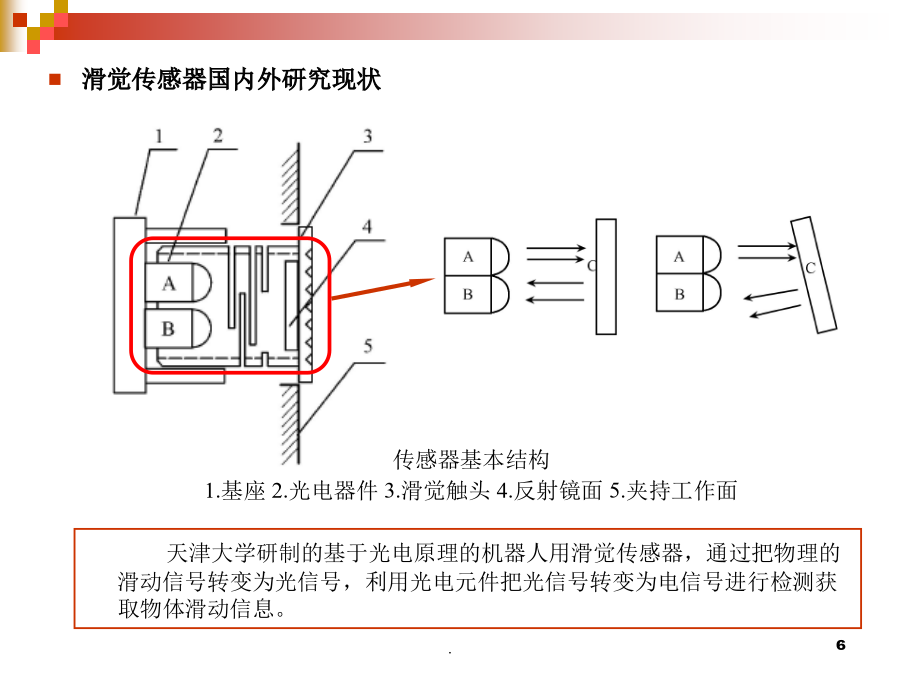
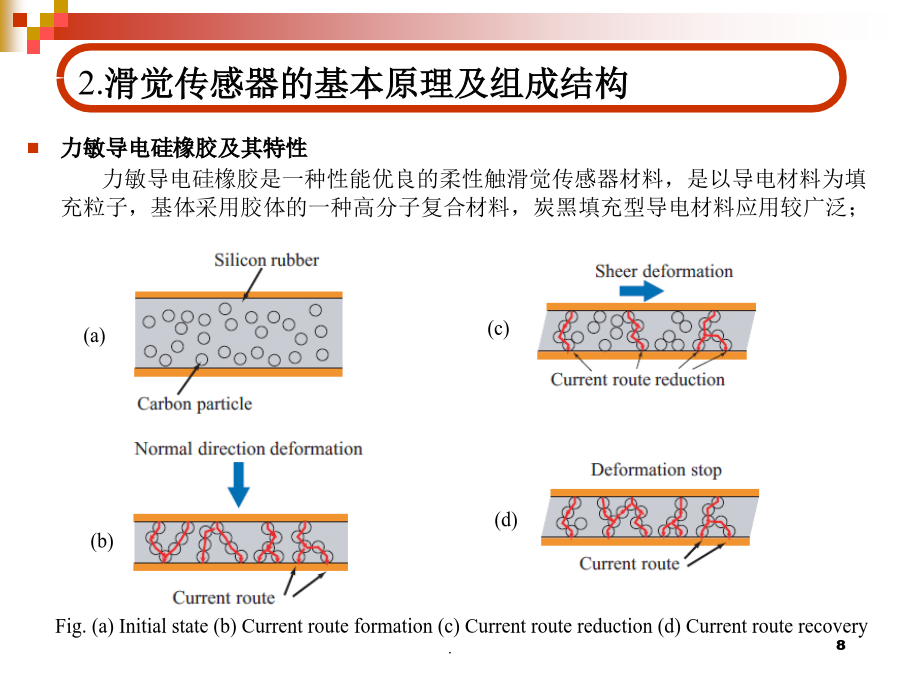
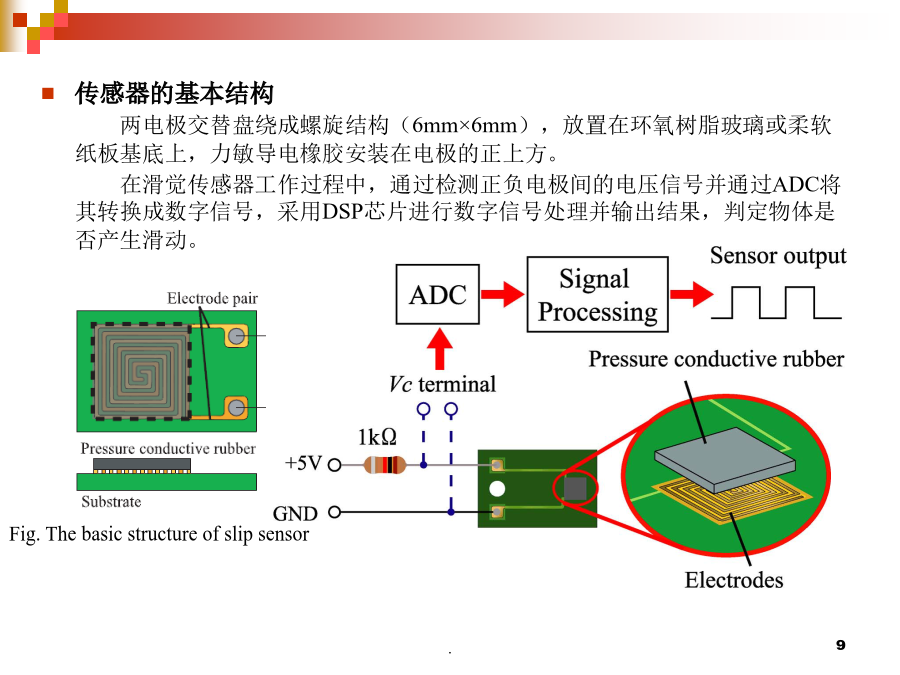
机械手实现灵巧抓取的新型滑觉传感器主要内容:1.研究背景简介软抓取技术使易碎物品的无损伤抓取成为现实,实现软抓取需在机械手上安装相应的传感器以获取抓取位置、抓取力以及滑动等信息。滑觉传感器是一种主要应用于检测机械手手爪与被夹持物体之间相对滑动的装置,其性能优劣直接决定了机械手能否顺利完成软抓取任务。滑觉传感器国内外研究现状滑觉传感器国内外研究现状滑觉传感器国内外研究现状2.滑觉传感器的基本原理及组成结构传感器的基本结构两电极交替盘绕成螺旋结构(6mm×6mm),放置在环氧树脂玻璃或柔软纸板基底上,力敏导电

机器人滑觉传感器ppt课件.ppt
机械手实现灵巧抓取的新型滑觉传感器主要内容:1.研究背景简介软抓取技术使易碎物品的无损伤抓取成为现实,实现软抓取需在机械手上安装相应的传感器以获取抓取位置、抓取力以及滑动等信息。滑觉传感器是一种主要应用于检测机械手手爪与被夹持物体之间相对滑动的装置,其性能优劣直接决定了机械手能否顺利完成软抓取任务。滑觉传感器国内外研究现状滑觉传感器国内外研究现状滑觉传感器国内外研究现状2.滑觉传感器的基本原理及组成结构传感器的基本结构两电极交替盘绕成螺旋结构(6mm×6mm),放置在环氧树脂玻璃或柔软纸板基底上,力敏导电

机器人滑觉传感器.ppt
机械手实现灵巧抓取的新型滑觉传感器主要内容:1.研究背景简介软抓取技术使易碎物品的无损伤抓取成为现实,实现软抓取需在机械手上安装相应的传感器以获取抓取位置、抓取力以及滑动等信息。滑觉传感器是一种主要应用于检测机械手手爪与被夹持物体之间相对滑动的装置,其性能优劣直接决定了机械手能否顺利完成软抓取任务。滑觉传感器国内外研究现状滑觉传感器国内外研究现状滑觉传感器国内外研究现状2.滑觉传感器的基本原理及组成结构传感器的基本结构两电极交替盘绕成螺旋结构(6mm×6mm),放置在环氧树脂玻璃或柔软纸板基底上,力敏导电

机器人滑觉传感器的研究.docx
机器人滑觉传感器的研究机器人滑觉传感器的研究摘要:滑觉传感器是机器人感知环境的重要组成部分,能够实时获取物体表面的摩擦与力信息,对于机器人在精确控制和操作中起着至关重要的作用。本论文通过综述滑觉传感器的发展历程、原理和应用领域,分析了滑觉传感器在机器人技术中的重要性和挑战。通过对滑觉传感器技术的当前研究进展的分析,提出了未来滑觉传感器研究的方向和发展趋势。1.引言机器人技术的发展已经取得了长足的进步,但是机器人在复杂环境下的灵活性和精确性仍然是一个挑战。而滑觉传感器作为机器人感知环境的重要组成部分,能够为
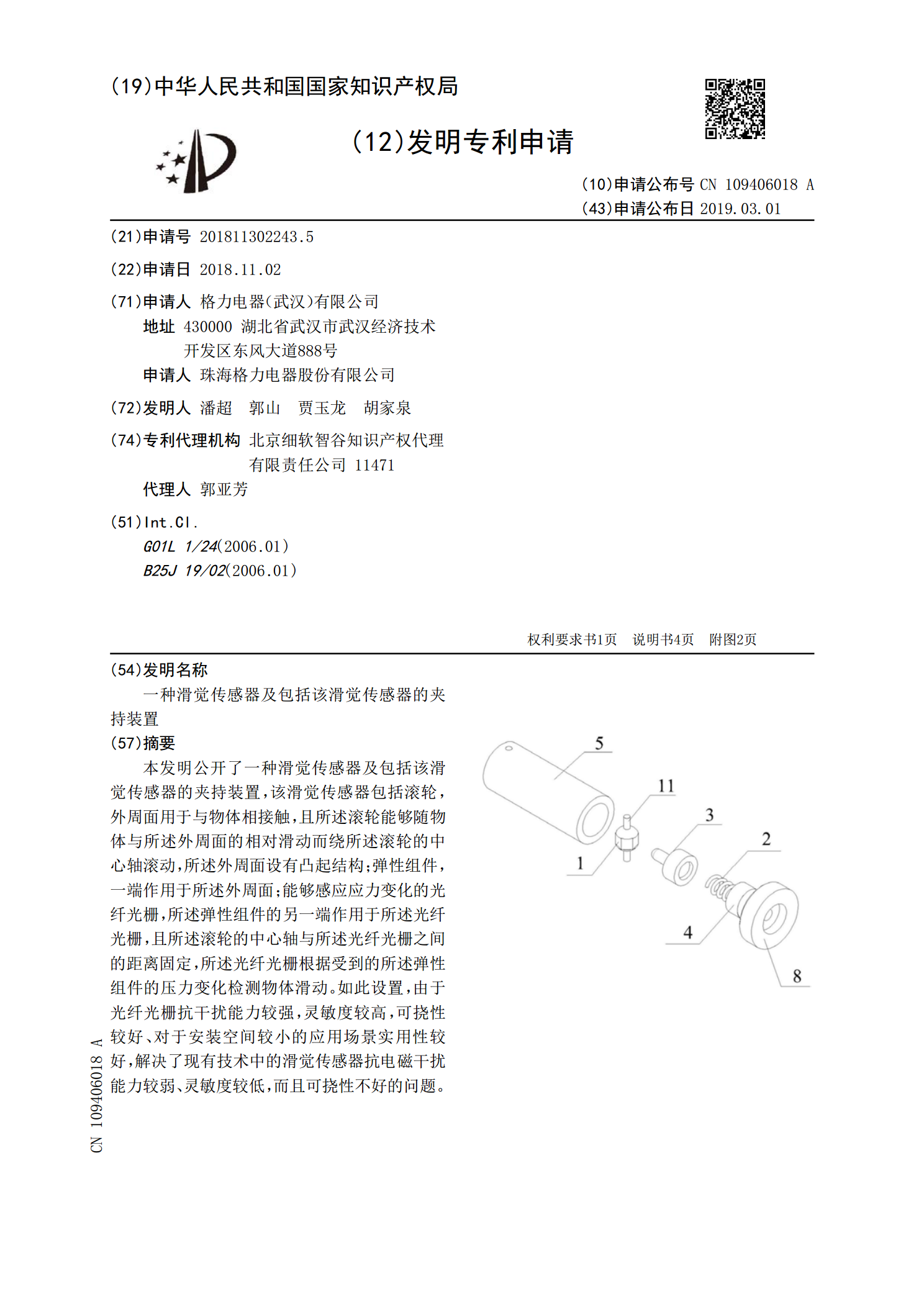
一种滑觉传感器及包括该滑觉传感器的夹持装置.pdf
本发明公开了一种滑觉传感器及包括该滑觉传感器的夹持装置,该滑觉传感器包括滚轮,外周面用于与物体相接触,且所述滚轮能够随物体与所述外周面的相对滑动而绕所述滚轮的中心轴滚动,所述外周面设有凸起结构;弹性组件,一端作用于所述外周面;能够感应应力变化的光纤光栅,所述弹性组件的另一端作用于所述光纤光栅,且所述滚轮的中心轴与所述光纤光栅之间的距离固定,所述光纤光栅根据受到的所述弹性组件的压力变化检测物体滑动。如此设置,由于光纤光栅抗干扰能力较强,灵敏度较高,可挠性较好、对于安装空间较小的应用场景实用性较好,解决了现有