
用于独立控制车轮滑移和车辆加速度的系统和方法.pdf

努力****元恺

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于独立控制车轮滑移和车辆加速度的系统和方法.pdf
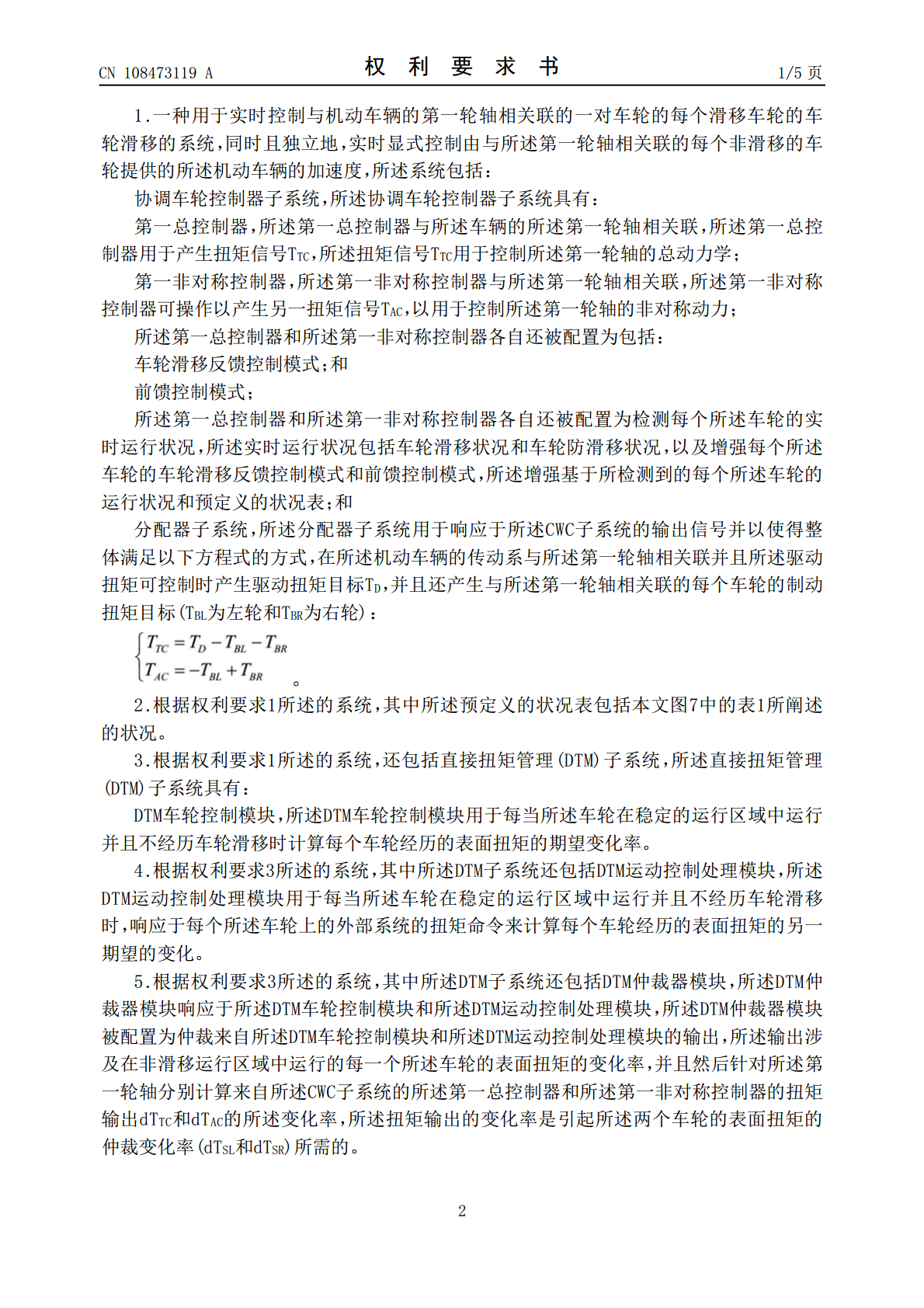
本公开涉及一种用于实时控制与机动车辆的轮轴相关联的一对车轮的每个滑移车轮的车轮滑移的系统,同时且独立地,实时显式控制由与所述轮轴相关联的每个非滑移车轮提供的所述机动车辆的加速度。所述系统利用与所述车辆的所述轮轴相关联的总控制器和非对称控制器来产生分别用于控制所述轮轴的总动力学和非对称动力的两个扭矩信号,以及用于将两个所述扭矩信号分配到可用致动器的目标中的分配器。所述两个所述控制器各自包括反馈控制元件和前馈控制元件,所述控制元件可操作以感测所述轮轴上的每个车轮的车轮滑移状况,并且基于所述感测到的车轮滑移状况

负车轮滑移控制系统和方法.pdf
本发明涉及负车轮滑移控制系统和方法。一种发动机控制系统,包括导数模块和滑移矫正模块。导数模块确定车辆的从动轮速度的数学导数。当该数学导数比预定减速度更负时,滑移矫正模块执行如下操作中的至少一种:禁用由一个或者多个电动马达执行的再生制动、提升车轴扭矩请求和解锁扭矩转换器。
用于车辆的车轮定位的方法和系统.pdf
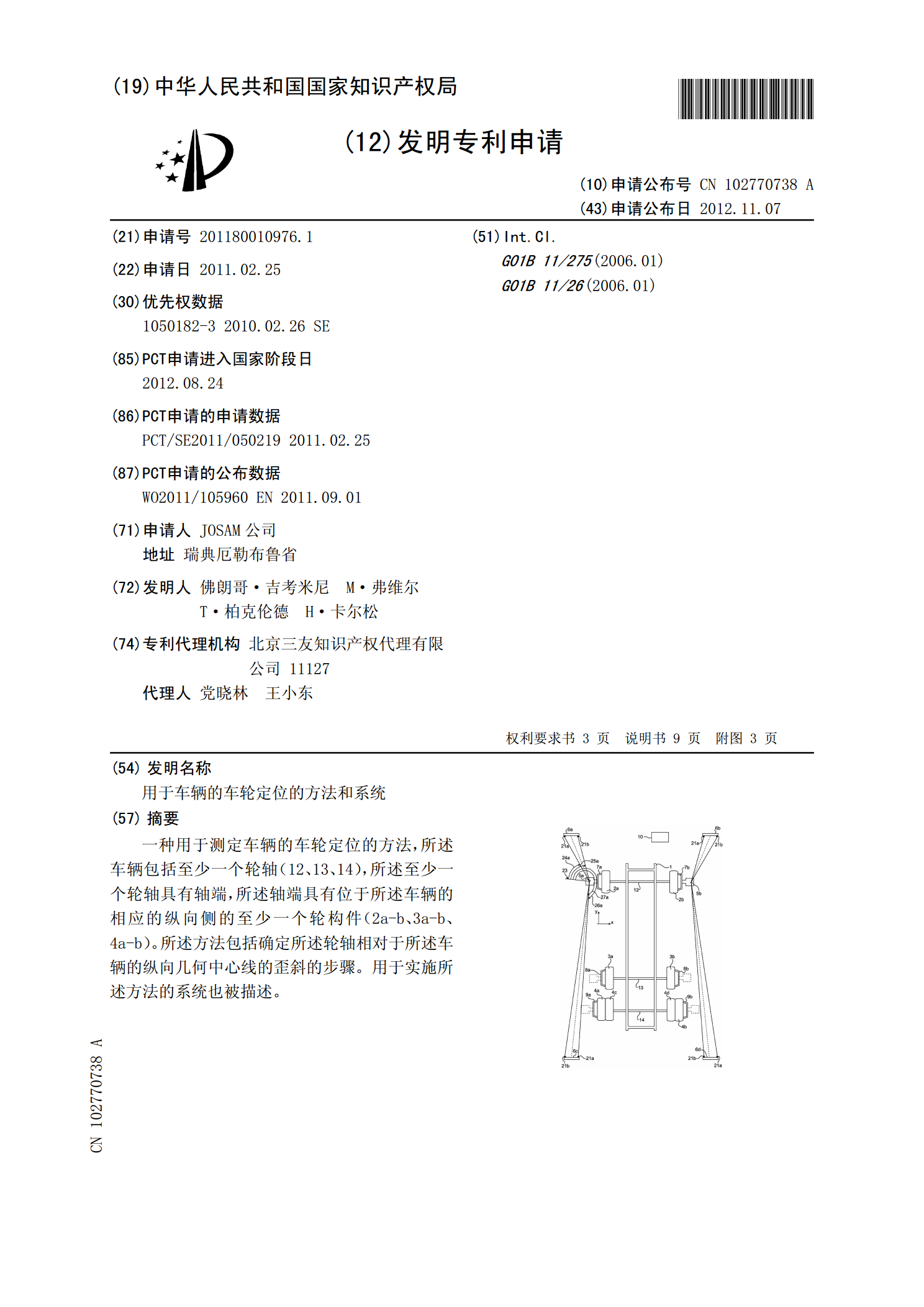
一种用于测定车辆的车轮定位的方法,所述车辆包括至少一个轮轴(12、13、14),所述至少一个轮轴具有轴端,所述轴端具有位于所述车辆的相应的纵向侧的至少一个轮构件(2a-b、3a-b、4a-b)。所述方法包括确定所述轮轴相对于所述车辆的纵向几何中心线的歪斜的步骤。用于实施所述方法的系统也被描述。

用于限制车轮滑移的方法和装置.pdf
本发明涉及用于限制车轮滑移的方法和装置。具体地,提供了一种发动机控制系统,包括发动机速度控制模块和空转限制模块。发动机速度控制模块基于怠速需求选择性地控制发动机。空转限制模块选择性地将怠速需求减小一个基于车轮滑移值的量。

调节牵引车辆中的车轮滑移的系统和方法.pdf
一种用于车辆的车辆牵引控制系统,其中所述车辆具有原动机、用于在支撑表面上提供牵引力的至少一个车轮、以及具有可操作地连接到原动机的输入侧和可操作地连接到所述至少一个车轮的输出侧的传动装置,并且其中传动装置在输入侧和输出侧之间具有可控制的离合器压力,所述牵引控制系统包括能够操作以监测至少一个车轮的车轮滑移的控制器。当车轮滑移被检测到时,控制器可操作以控制离合器压力以用于调整传动装置的输出转矩,来减少车轮滑移。可以根据离合器滑移控制离合器压力。