
一种用于车辆的测速装置及方法.pdf

小寄****淑k


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于车辆的测速装置及方法.pdf
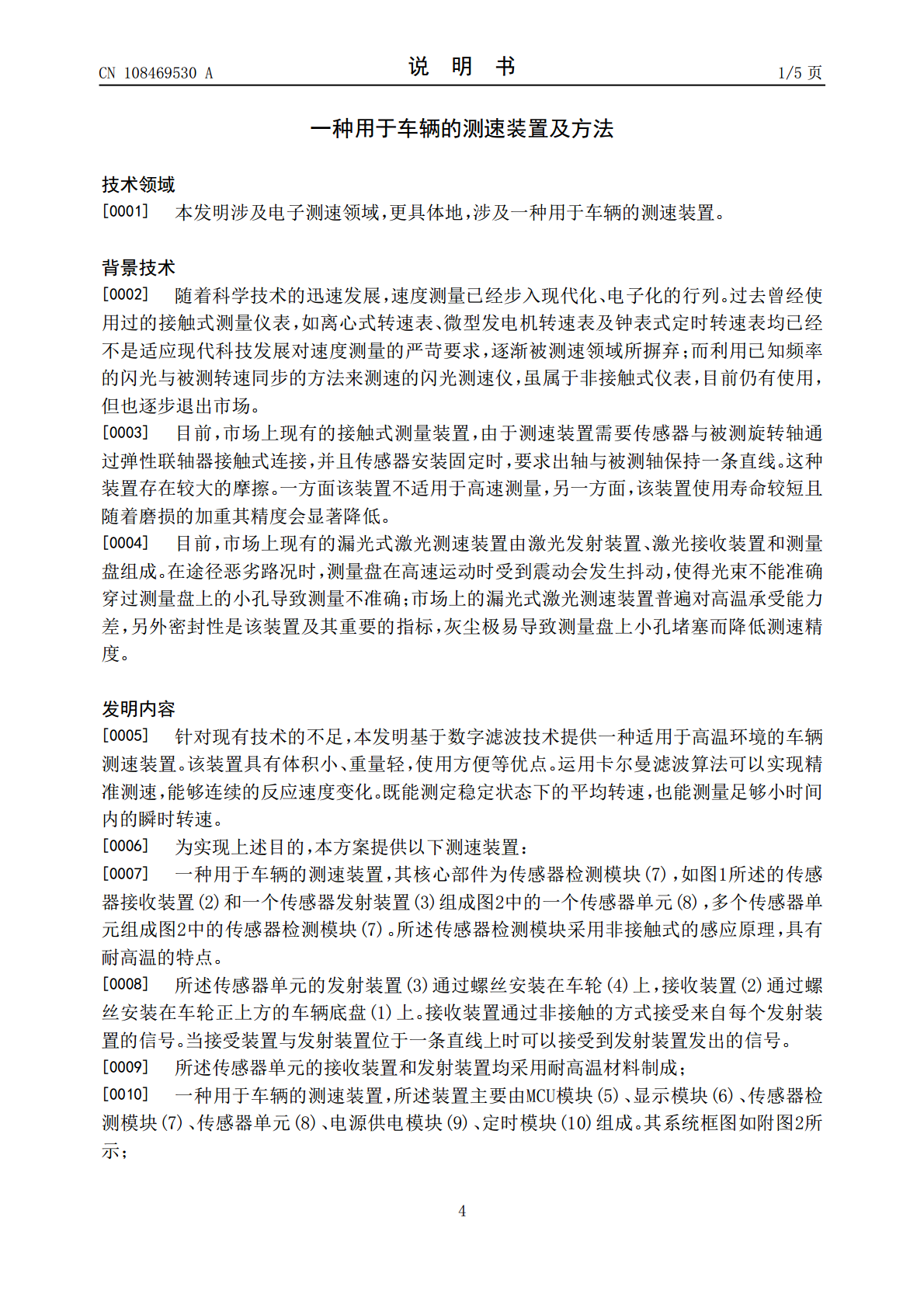
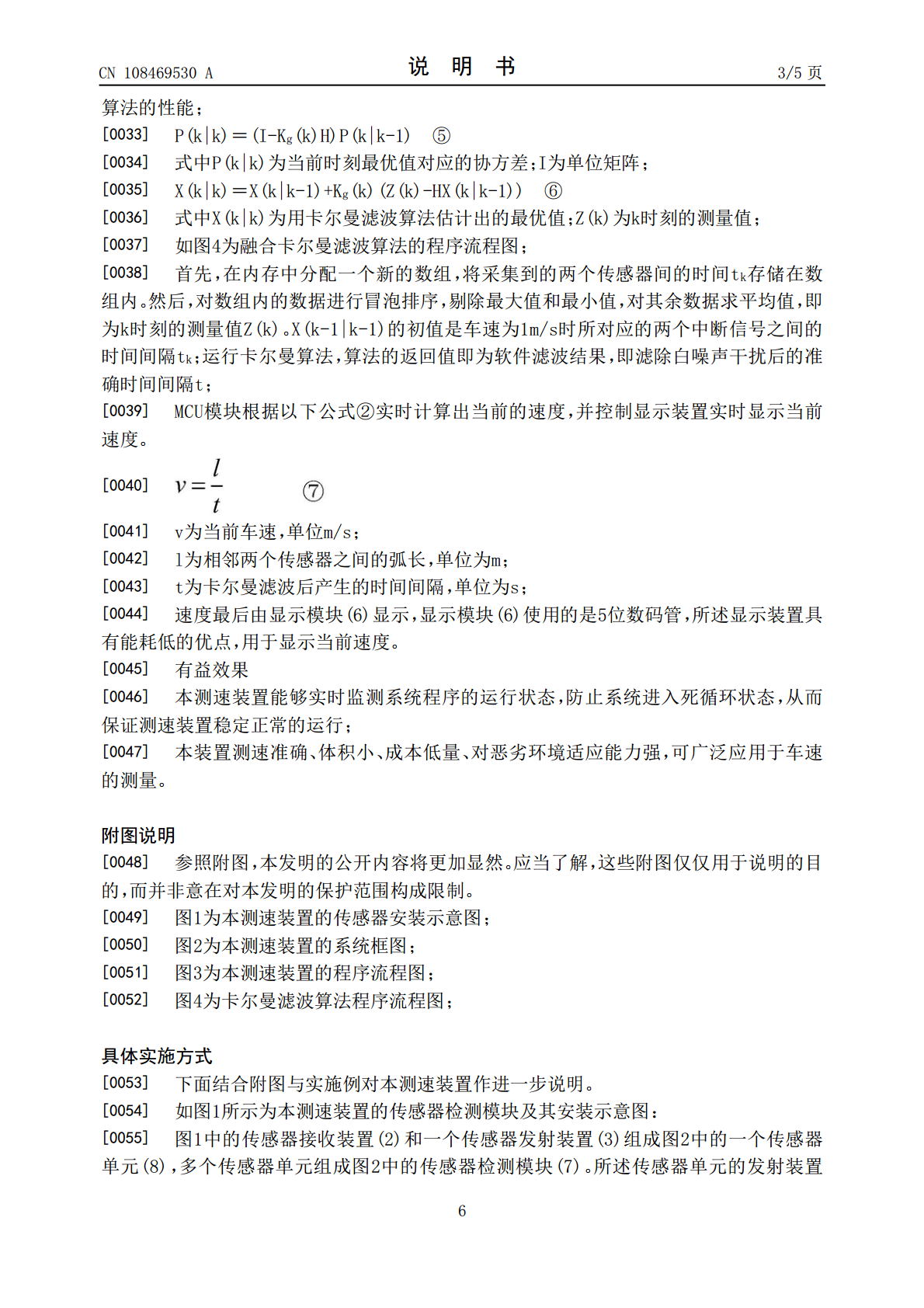
本发明涉及一种用于车辆的测速装置,特别涉及高温等恶劣环境下的车辆测速装置。本发明核心为传感器,所述传感器具有多个发射装置(3)设置在车轮上,具有一个接收装置(2)设置在车轮正上方的车辆底盘上,所述传感器采用非接触的感应原理,具有耐高温的特点。另外,所述测速装置一般包括:MCU模块,传感器检测模块,传感器单元,电源供电模块,定时模块,显示模块。本发明通过传感器检测模块对车辆进行数据测量,通过定时模块进行时间计算,通过MCU模块对数据进行卡尔曼数字滤波处理后,换算成车速,最后通过显示模块对当前车速进行实时显示

一种测速方法、装置及车辆.pdf
本申请公开了一种测速方法,该方法包括:通过三轴加速度计获得车辆在第一时刻的第一加速度;通过速度传感器获得所述车辆在所述第一时刻的第一速度;根据所述第一加速度和所述第一速度,获得所述车辆在所述第一时刻的目标速度。该方法可以提升车辆的目标速度的准确度。

作用于车辆的道路安保装置和一种车辆测速装置.pdf
作用于车辆的道路安保装置和一种车辆测速装置属于车辆安全、交通安全、保卫安全领域,尤其是用于测量和显示车辆速度、用于防范汽车超速、用于限制汽车速度以保安的领域。现有车辆测速存在不足:1,需要电力,2,需要人工启动。为解决现有技术的不足,本发明的有益效果是:不需电力,自动启动,可用于安保和测速。本发明解决技术问题而采取的技术手段为:一种作用于车辆的道路安保装置,其特征是:感应装置包括压动板(1)、压动齿轮(12)、第一回拉装置(13)、第一棘轮(2),所述刺穿装置包括第二棘轮(41)、转动杆(42)、甩动杆、
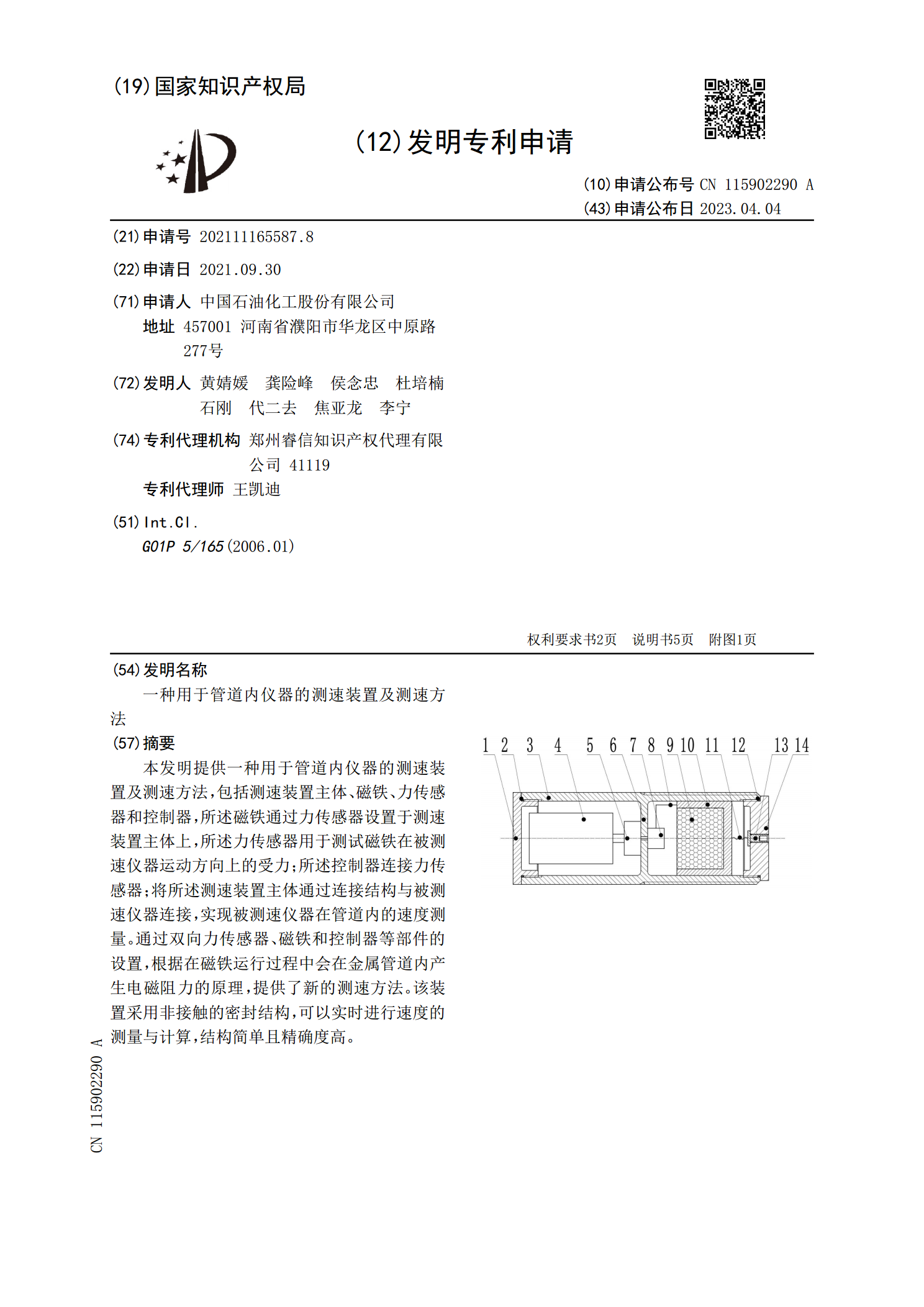
一种用于管道内仪器的测速装置及测速方法.pdf
本发明提供一种用于管道内仪器的测速装置及测速方法,包括测速装置主体、磁铁、力传感器和控制器,所述磁铁通过力传感器设置于测速装置主体上,所述力传感器用于测试磁铁在被测速仪器运动方向上的受力;所述控制器连接力传感器;将所述测速装置主体通过连接结构与被测速仪器连接,实现被测速仪器在管道内的速度测量。通过双向力传感器、磁铁和控制器等部件的设置,根据在磁铁运行过程中会在金属管道内产生电磁阻力的原理,提供了新的测速方法。该装置采用非接触的密封结构,可以实时进行速度的测量与计算,结构简单且精确度高。

一种用于车辆测速的信标.pdf
本发明提供了一种用于车辆测速的信标,其可以满足厂区管理对车辆测速的低成本、简单施工和全区域实时测速的需求,包括电控连接的蓝牙模块、加速度采集模块、电源管理模块、电池,信标安装在车轮上,所述加速度采集模块用于收集车轮转速数据,所述蓝牙模块接收所述加速度采集模块收集的车轮转速数据并通过蓝牙信号进行广播,用于供蓝牙扫描设备获取。