
卫星导航多径信号参数估计和误差抑制方法.pdf

玉怡****文档

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
卫星导航多径信号参数估计和误差抑制方法.pdf
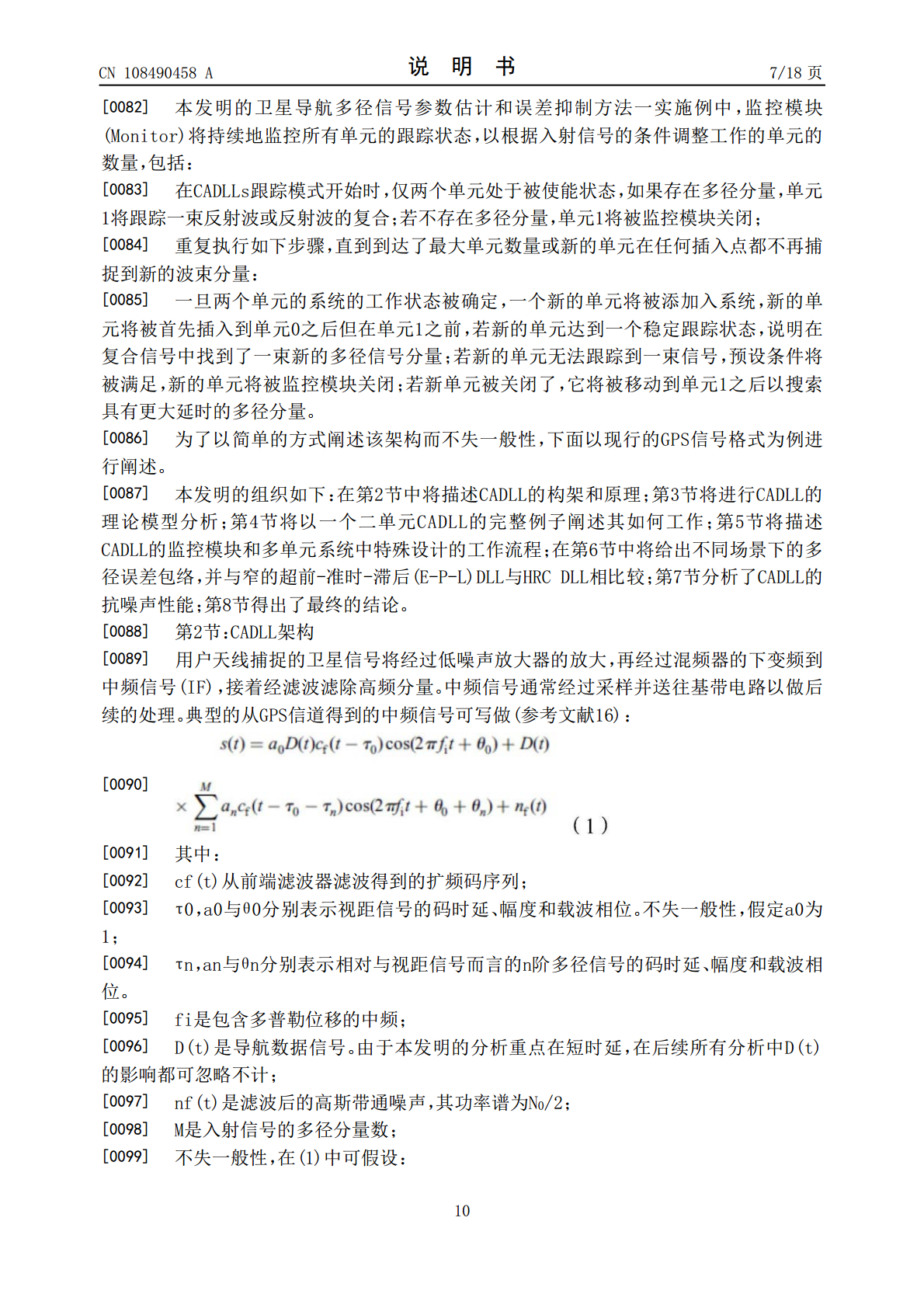
本发明提供了一种卫星导航多径信号参数估计和误差抑制方法,本发明提出了一种新的用于卫星导航接收机的多径抑制架构:耦合幅度时延锁定环路,该架构利用“涡轮原理”分别追踪视距信号和多径信号,以抑制多重反射的效应。在该结构中,时延锁定环路(DLL)和幅度锁定环路(ALL)是两种基本元素。DLL负责估计和跟踪某一特定波束的码延迟,而ALL负责估计对应的幅度。一对DLL与ALL构成一个“单元”,专门跟踪视距或一束多径信号。CADLL结构中有多组“单元”,可跟踪完整入射信号的不同波束分量。CADLL所具有的这种反馈构架和

卫星导航接收机干扰及多径抑制方法研究的开题报告.docx
卫星导航接收机干扰及多径抑制方法研究的开题报告一、选题背景随着全球卫星导航系统的发展,卫星导航接收机已经成为日常生活和工作中不可或缺的设备之一。然而,卫星导航接收机的性能受到干扰和多径效应的影响,这对其可靠性和精度造成了极大的影响。因此,对于卫星导航接收机干扰及多径抑制方法的研究和优化,具有重要的实际意义。二、研究目的和意义本研究旨在探讨卫星导航接收机干扰及多径抑制方法,具体目的包括:1.研究各种可能的干扰类型,如天线干扰、中频干扰、码跳和带宽干扰等,并分析其对导航信号的影响。2.分析多径效应的形成原因及

非直达径卫星导航信号识别方法、系统及介质.pdf
本发明提供了一种非直达径卫星导航信号识别方法、系统及介质,包括:步骤S1:样本数据处理单元(111)接收采集得到的样本数据,记为采集信号数据,依据伪距残差值以及多普勒误差绝对值对于样本数据中的LOS和NLOS信号进行判定,获得多径类别判定结果;步骤S2:在每一个历元时刻,初始化单元(112)负责接收待检测卫星导航信号,获得初始化单元(112)的输入信号参数,包括各个卫星信号的伪距、积分多普勒和载噪比参数信息,其均可在信号的跟踪环路中测量得到。本发明基于信号特征参数对于非直达径卫星导航信号进行识别,通过信号

一种卫星导航信号牵引中的多普勒参数估计方法.pdf
本发明公开了一种卫星导航信号牵引中的多普勒参数估计方法。本发明提出了多普勒参数估计分成千赫兹误差、百赫兹误差、几十赫兹误差三个阶段;可快速缩小信号多普勒误差,给信号跟踪提供精确的多普勒估计参数;并可采用复用模式,降低硬件资源消耗。该方法降低了卫星导航信号捕获多普勒误差范围要求,有利于捕获方法向码相位搜索侧重,适用于卫星导航信号长扩频码信号的接收处理。

一种卫星导航信号多址干扰检测方法.pdf
本发明提供了一种卫星导航信号多址干扰检测方法,属于卫星应用领域。本发明根据接收机跟踪通道发生互相关干扰时的互相关功率与载波多普勒偏差的关系,判定接收机是否发存在互相关干扰。本发明可解决高灵敏度信号接收中强信号多址干扰问题,保证高灵敏度信号接收处理的准确性和可靠性。本发明实现的卫星导航接收机多址干扰检测方法,可广泛应用于高轨航天器、探月返回等高灵敏度卫星导航接收机中,具有广阔的推广应用前景。