
一种多自由度机器人装置.pdf

Jo****63

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度机器人装置.pdf
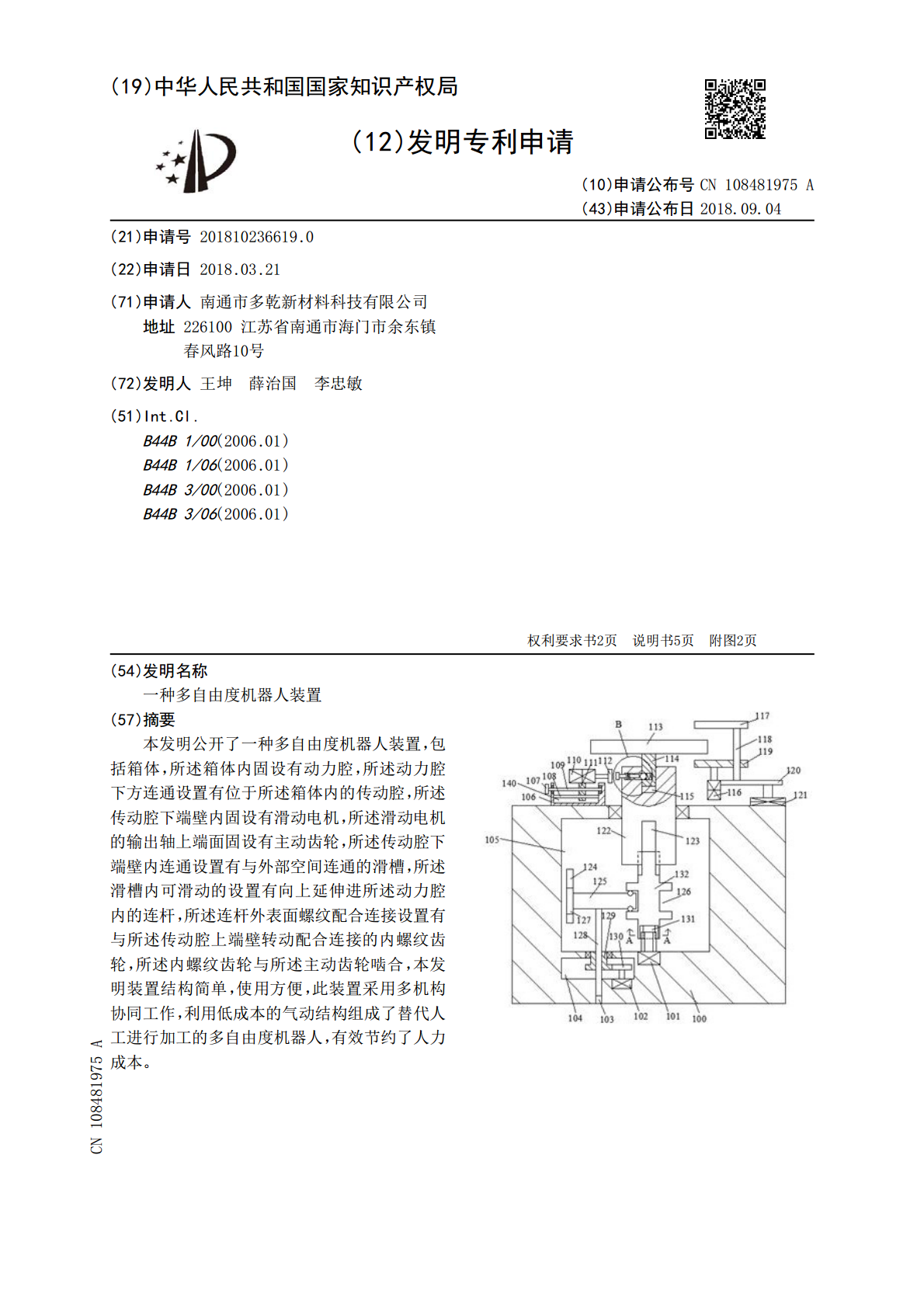
本发明公开了一种多自由度机器人装置,包括箱体,所述箱体内固设有动力腔,所述动力腔下方连通设置有位于所述箱体内的传动腔,所述传动腔下端壁内固设有滑动电机,所述滑动电机的输出轴上端面固设有主动齿轮,所述传动腔下端壁内连通设置有与外部空间连通的滑槽,所述滑槽内可滑动的设置有向上延伸进所述动力腔内的连杆,所述连杆外表面螺纹配合连接设置有与所述传动腔上端壁转动配合连接的内螺纹齿轮,所述内螺纹齿轮与所述主动齿轮啮合,本发明装置结构简单,使用方便,此装置采用多机构协同工作,利用低成本的气动结构组成了替代人工进行加工的多

一种游戏机器人的多自由度武器操控装置.pdf
本发明公开了一种游戏机器人的多自由度武器操控装置,包括机架、设置在机架上的动力输入把手和设置在机架上的执行杆,所述动力输入把手下端固定设有水平设置的把手转轴,执行杆安装端固定设有水平设置的执行杆转轴,把手转轴通过设置的竖向传动机构和执行杆转轴相连并用于带动执行杆转轴竖向旋转,把手转轴可转动的安装在把手安装架上,所述把手安装架可水平旋转的设置在机架上,执行杆转轴可转动的安装在执行杆安装架上,所述执行杆安装架可水平旋转的设置在机架上,把手安装架通过设置的水平传动机构和执行杆安装架相连并用于带动执行杆安装架水平

一种多自由度夹持机器人.pdf
本发明涉及一种机器人,更具体的说是一种多自由度夹持机器人,包括底架、高度机构、转动座、夹持手和伸出机构,本发明中的夹头可以以转轴为轴进行旋转,并且夹头的高度可以根据需要调整,夹头还可以向前水平伸出和缩回,便于机器人夹持物体做出各种动作,便于将夹持的物体移动至不同位置。所述高度机构的下端铰接在底架上,转动座转动连接在高度机构的上端,夹持手固定连接在转动座上,伸出机构的一端滑动连接在底架上,伸出机构的另一端间隙配合插在夹持手上。

一种多自由度夹持装置.pdf
本发明公开了一种多自由度夹持装置,通过设置有上滑动轨道、第一上滑动座体、第二上滑动座体,在支撑板体的正下方设置有移动底座,在移动底座上固定安装有下滑动轨道,在下滑动轨道上滑动安装有第一下滑动座体,在下滑动轨道上滑动安装有第二下滑动座体,在第一上滑动座体和第二下滑动座体之间连接有第一调节杆,在第二上滑动座体和第一下滑动座体之间连接有第二调节杆,便于利用驱动器对第一调节杆和第二调节杆的角度进行调节,这样能够调节整个支撑板体的高度;通过设置有移动轮,便于移动。通过设置有第一气缸和第二气缸,能够带动第一上折形杆和

一种汽车轮毂码垛机器人用多自由度执行装置.pdf
本发明涉及一种汽车轮毂码垛机器人用多自由度执行装置,包括Stewart并联机构和码垛机械手;所述的Stewart并联机构位于码垛机械手正上方,且Stewart并联机构下端与码垛机械手相连接。本发明可实现对轮毂的抓取、搬运和堆放等一系列作业,且自动化程度高、运动平稳灵活、作业效率高,解决了人工作业成本高、效率低和危险性大等问题,其Stewart并联机构在空间内可进行三平移三转动共六个自由度方向的运动,且运动柔性好、运动空间小、运动灵活性好,将Stewart并联机构应用到本发明中,可带动码垛机械手在空间内的柔