
基于绳索驱动的轮辐式柔性机械臂.pdf

葫芦****io

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于绳索驱动的轮辐式柔性机械臂.pdf
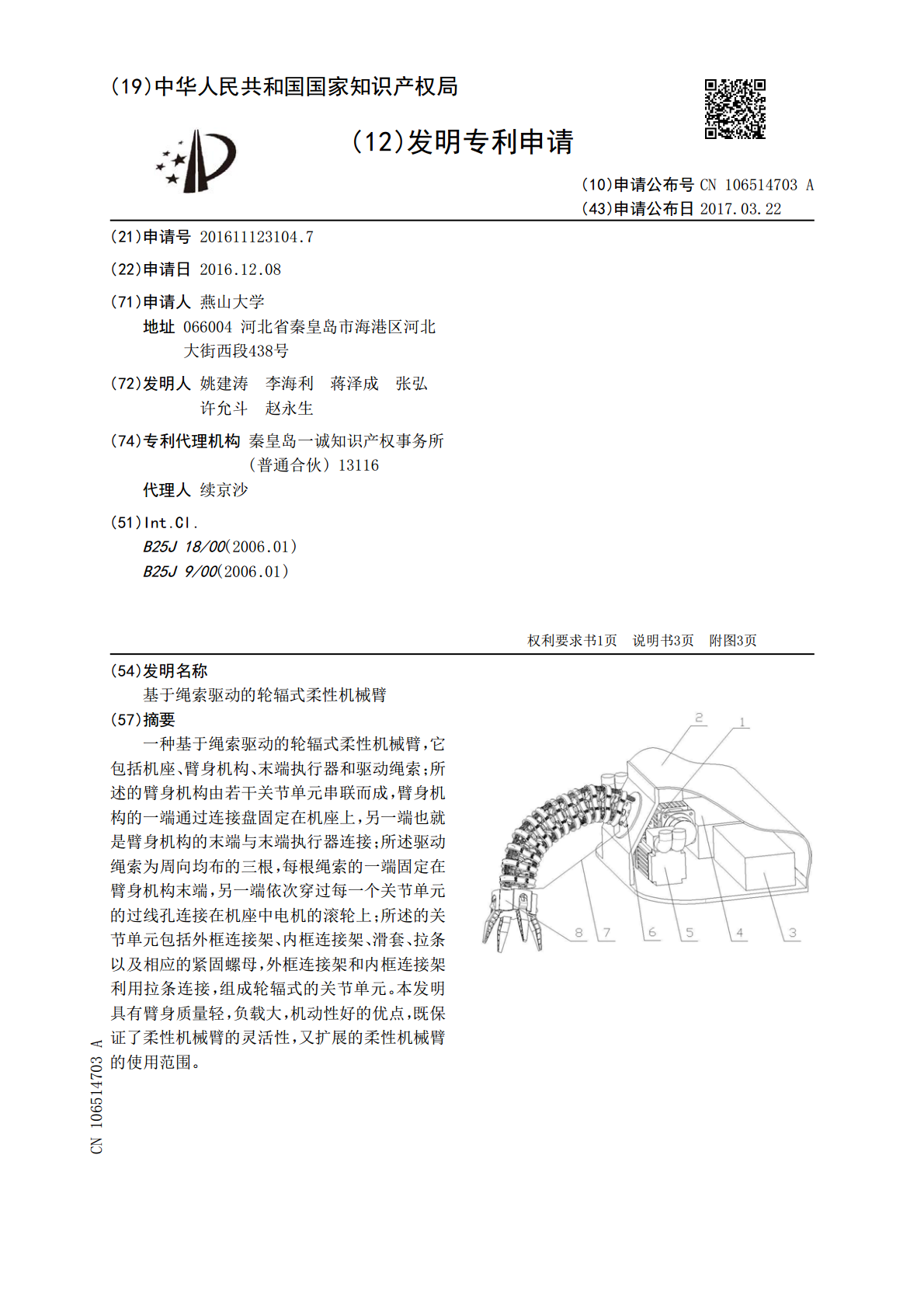
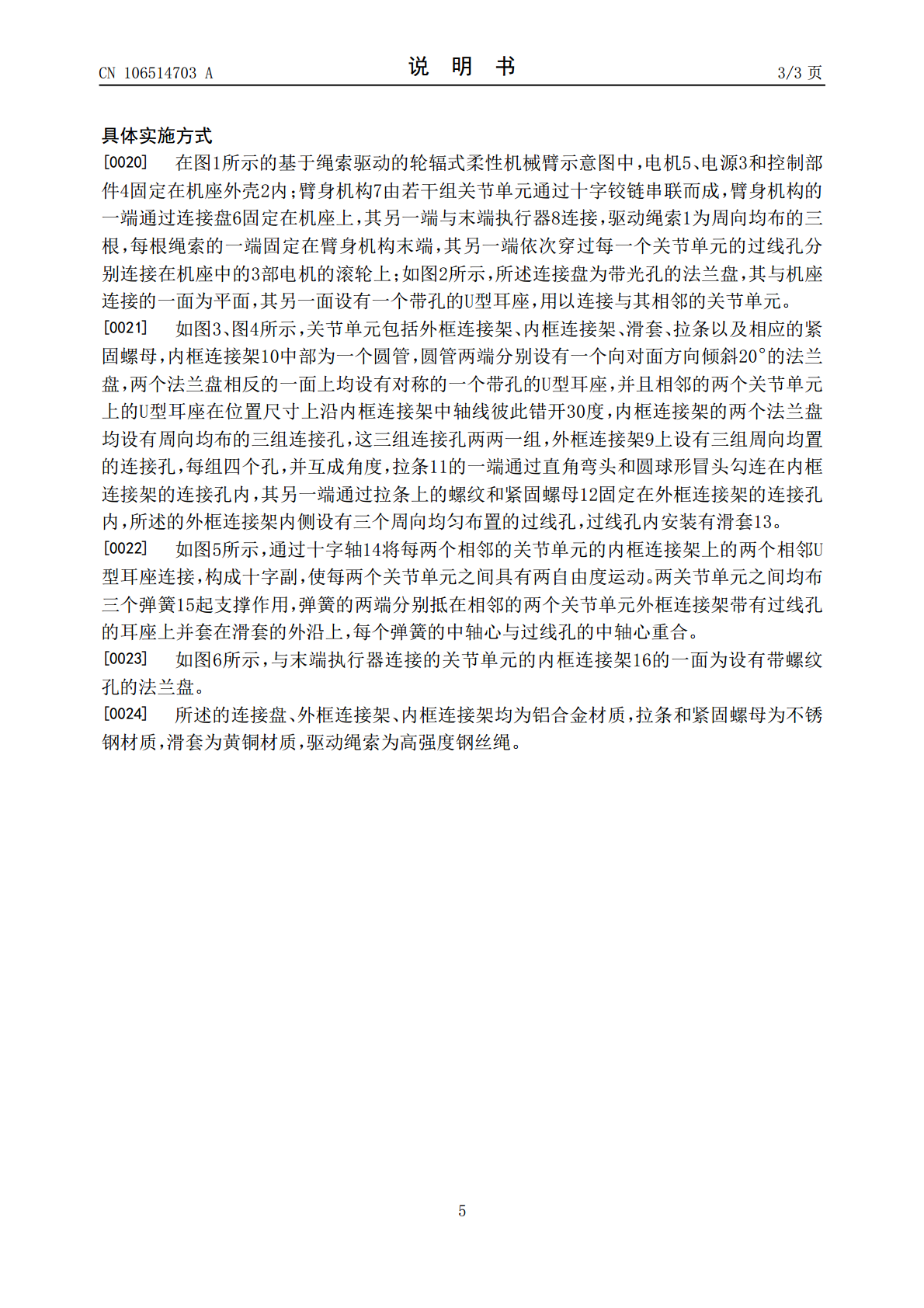
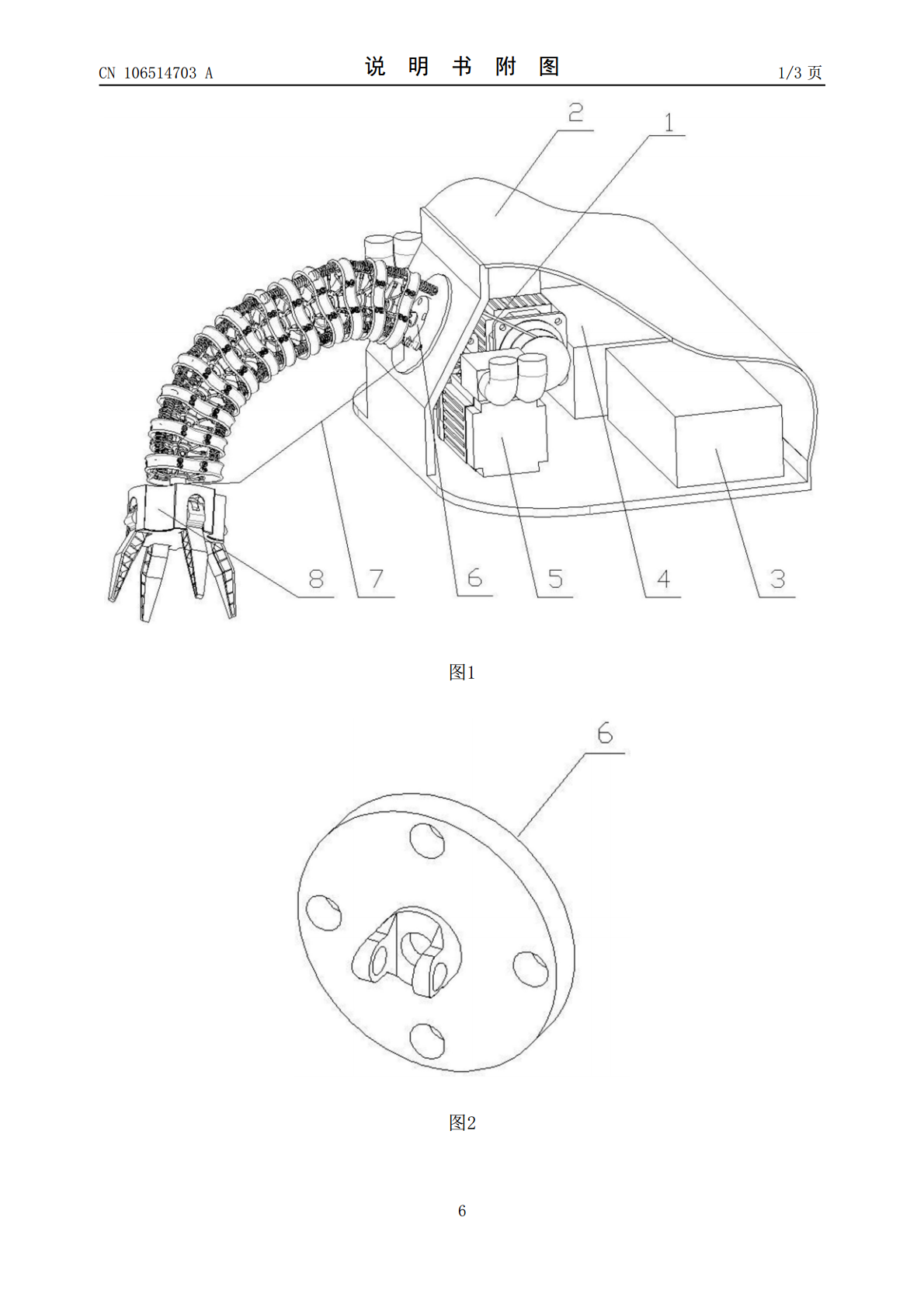
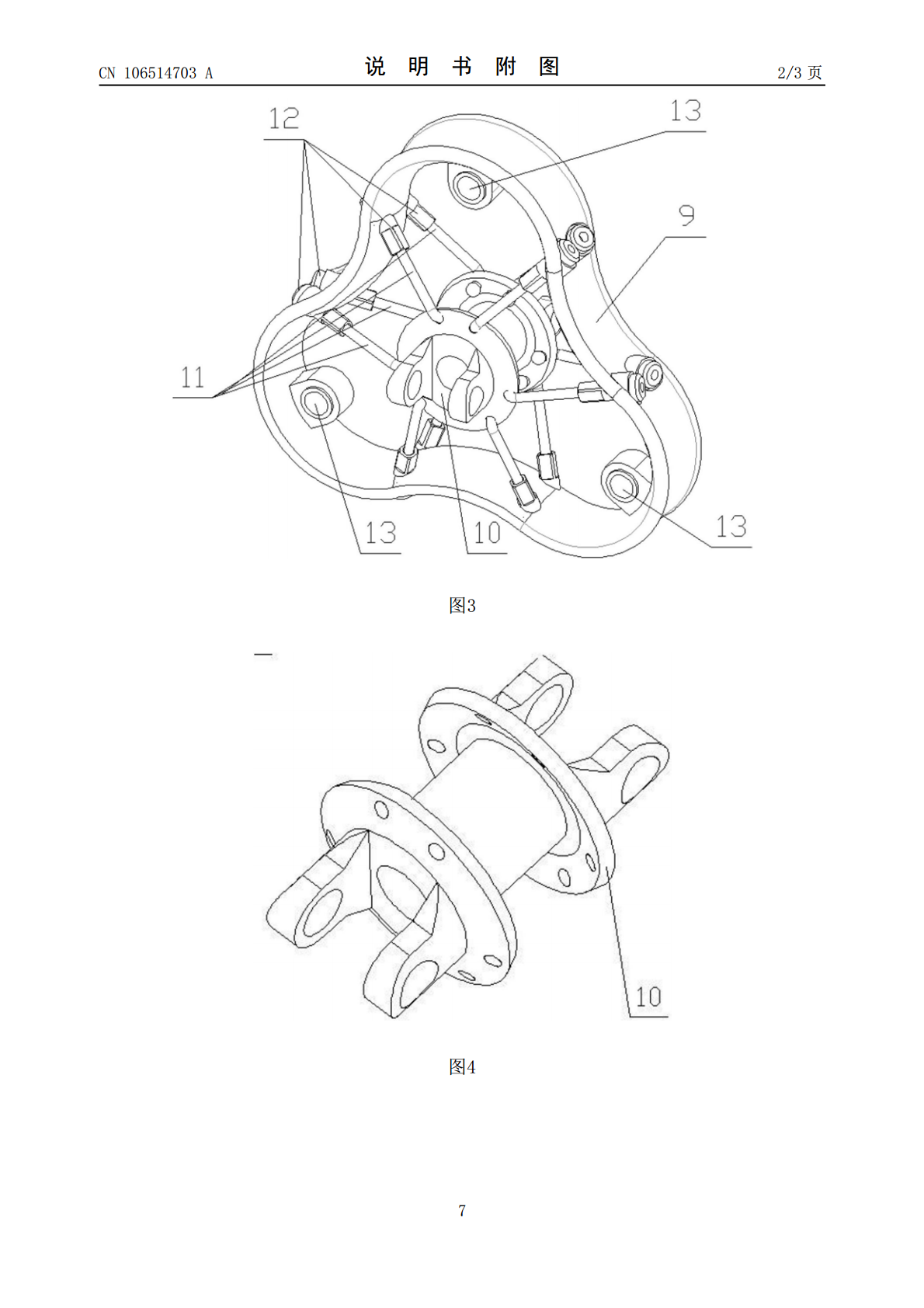
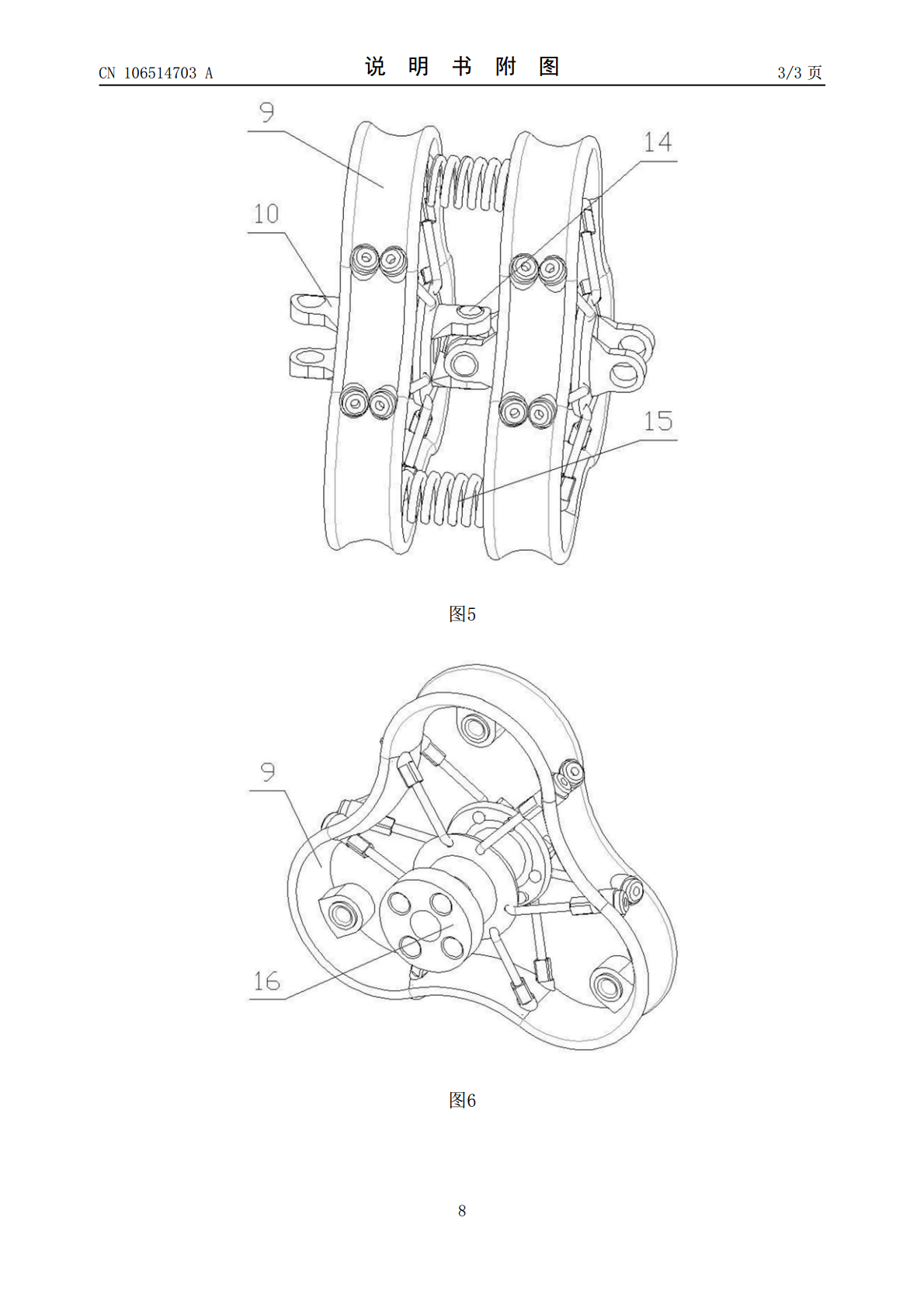
一种基于绳索驱动的轮辐式柔性机械臂,它包括机座、臂身机构、末端执行器和驱动绳索;所述的臂身机构由若干关节单元串联而成,臂身机构的一端通过连接盘固定在机座上,另一端也就是臂身机构的末端与末端执行器连接;所述驱动绳索为周向均布的三根,每根绳索的一端固定在臂身机构末端,另一端依次穿过每一个关节单元的过线孔连接在机座中电机的滚轮上;所述的关节单元包括外框连接架、内框连接架、滑套、拉条以及相应的紧固螺母,外框连接架和内框连接架利用拉条连接,组成轮辐式的关节单元。本发明具有臂身质量轻,负载大,机动性好的优点,既保证了
一种用于绳索驱动型柔性机械臂的驱动装置.pdf
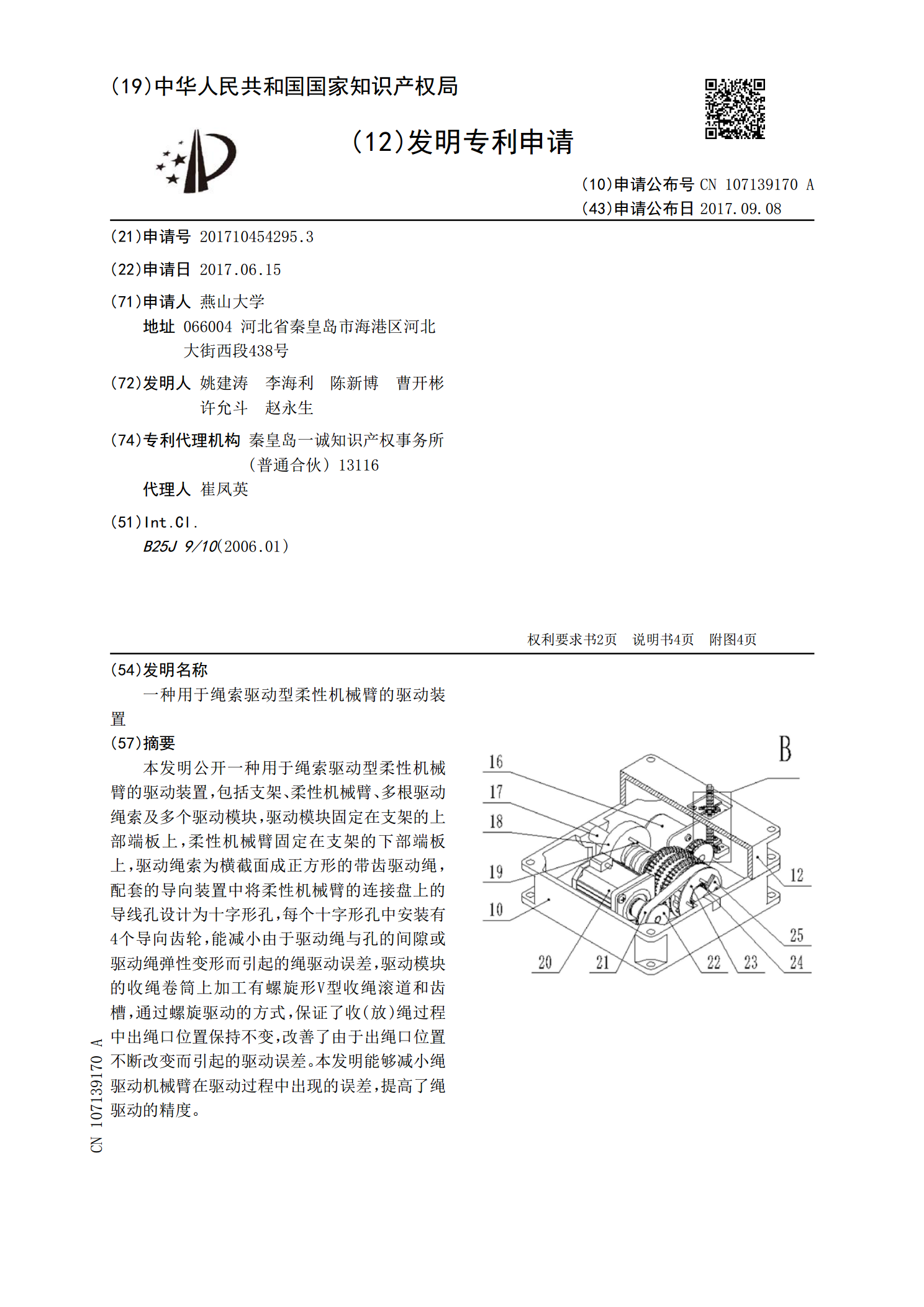
本发明公开一种用于绳索驱动型柔性机械臂的驱动装置,包括支架、柔性机械臂、多根驱动绳索及多个驱动模块,驱动模块固定在支架的上部端板上,柔性机械臂固定在支架的下部端板上,驱动绳索为横截面成正方形的带齿驱动绳,配套的导向装置中将柔性机械臂的连接盘上的导线孔设计为十字形孔,每个十字形孔中安装有4个导向齿轮,能减小由于驱动绳与孔的间隙或驱动绳弹性变形而引起的绳驱动误差,驱动模块的收绳卷筒上加工有螺旋形V型收绳滚道和齿槽,通过螺旋驱动的方式,保证了收(放)绳过程中出绳口位置保持不变,改善了由于出绳口位置不断改变而引起

绳索驱动式蛇形机械臂机构设计与运动分析.docx
绳索驱动式蛇形机械臂机构设计与运动分析绳索驱动式蛇形机械臂机构设计与运动分析摘要:蛇形机械臂是一种灵活多变的机械结构,具有良好的适应性和机动性,在许多领域中具有广泛的应用。本论文针对绳索驱动式蛇形机械臂进行了设计与运动分析,通过分析机构结构和运动原理,探讨了其工作原理和优势,为蛇形机械臂的应用提供了参考。1.引言蛇形机械臂是一种模拟蛇的运动原理和结构的机械臂,其由多个相互连接的节段组成,每个节段通过绳索或链条连接。相比传统的机械臂结构,蛇形机械臂具有更好的柔顺性和适应性,可以在狭小空间中完成各种复杂任务。

基于绳索驱动的蛇形机械臂运动控制研究的开题报告.docx
基于绳索驱动的蛇形机械臂运动控制研究的开题报告一、选题背景近年来,机械臂技术在工业制造、医疗、教育等领域得到广泛应用。随着机械臂的应用不断推进,机械臂的控制方法也得到了不断的改进。绳索驱动的机械臂具有结构简单、自重轻、动力平稳等优势,能够适应一定程度的负载和运动自由度。因此,研究绳索驱动的蛇形机械臂的运动控制,对于提高机械臂数字化、智能化水平,具有重要的理论和应用意义。二、研究内容1、分析蛇形机械臂的运动学和动力学特性,建立绳索驱动的蛇形机械臂数学模型。2、设计蛇形机械臂的控制算法,实现蛇形机械臂的关节运

基于绳索驱动的蛇形机械臂运动控制研究的任务书.docx
基于绳索驱动的蛇形机械臂运动控制研究的任务书一、研究背景与意义蛇形机械臂是一种可以模拟蛇的运动形态,进行多自由度机械臂运动的机器人。蛇形机械臂的自由度非常高,能够灵活适应复杂、狭窄、危险等环境,具有很大的应用前景。基于绳索驱动的蛇形机械臂运动控制技术,成为近年来重要的研究方向之一。与传统码垛机、装配机等机械臂控制相比,绳索驱动的蛇形机械臂具有极高的可塑性和机动性,并被广泛应用于医疗、救援、建筑和农业等领域,如探测难以到达的地方,救助化学泄漏和天然灾害的受影响地带等。本研究任务在于研究基于绳索驱动的蛇形机械