
一种用于浇注的机械臂.pdf

书生****瑞梦

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于浇注的机械臂.pdf
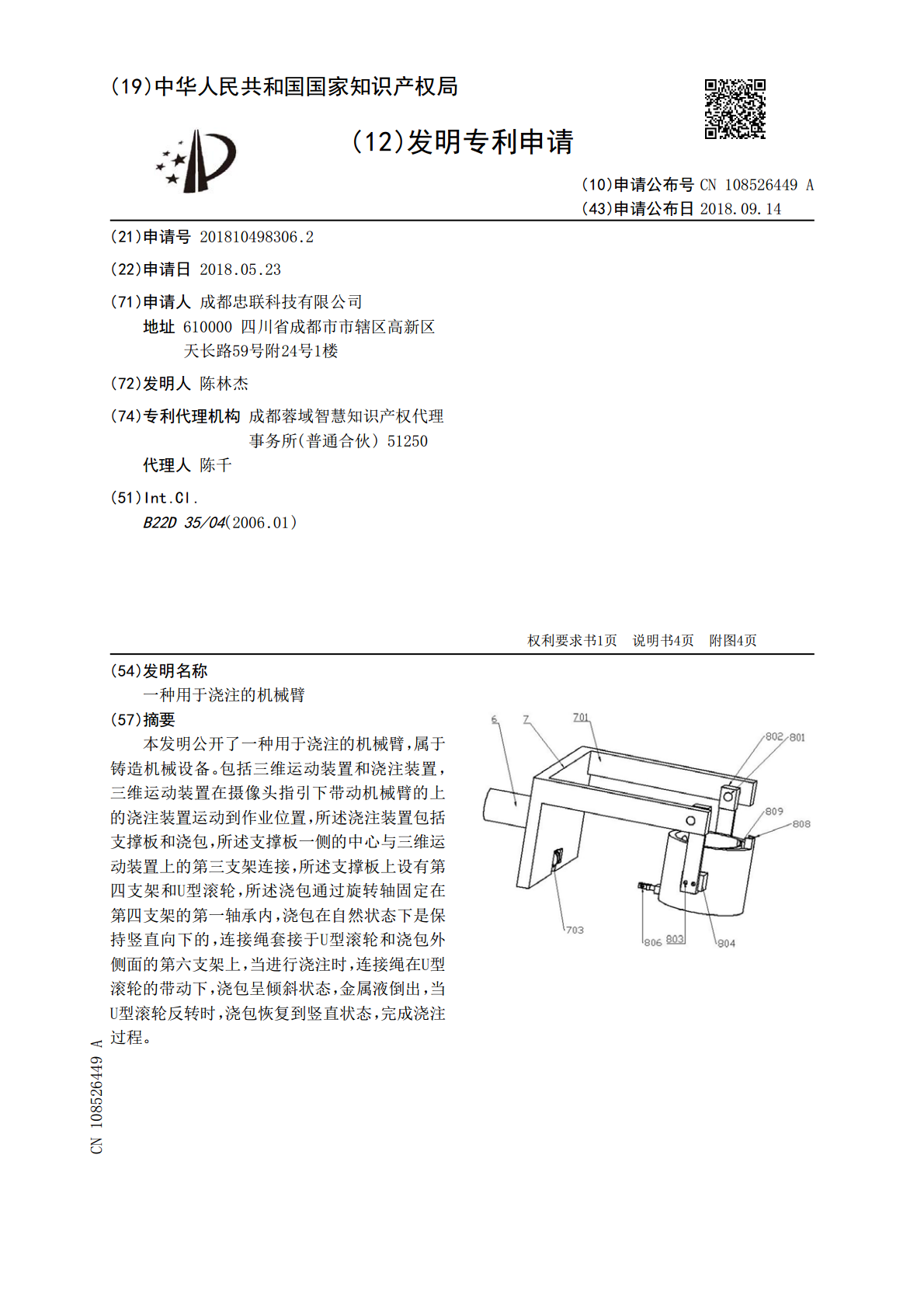
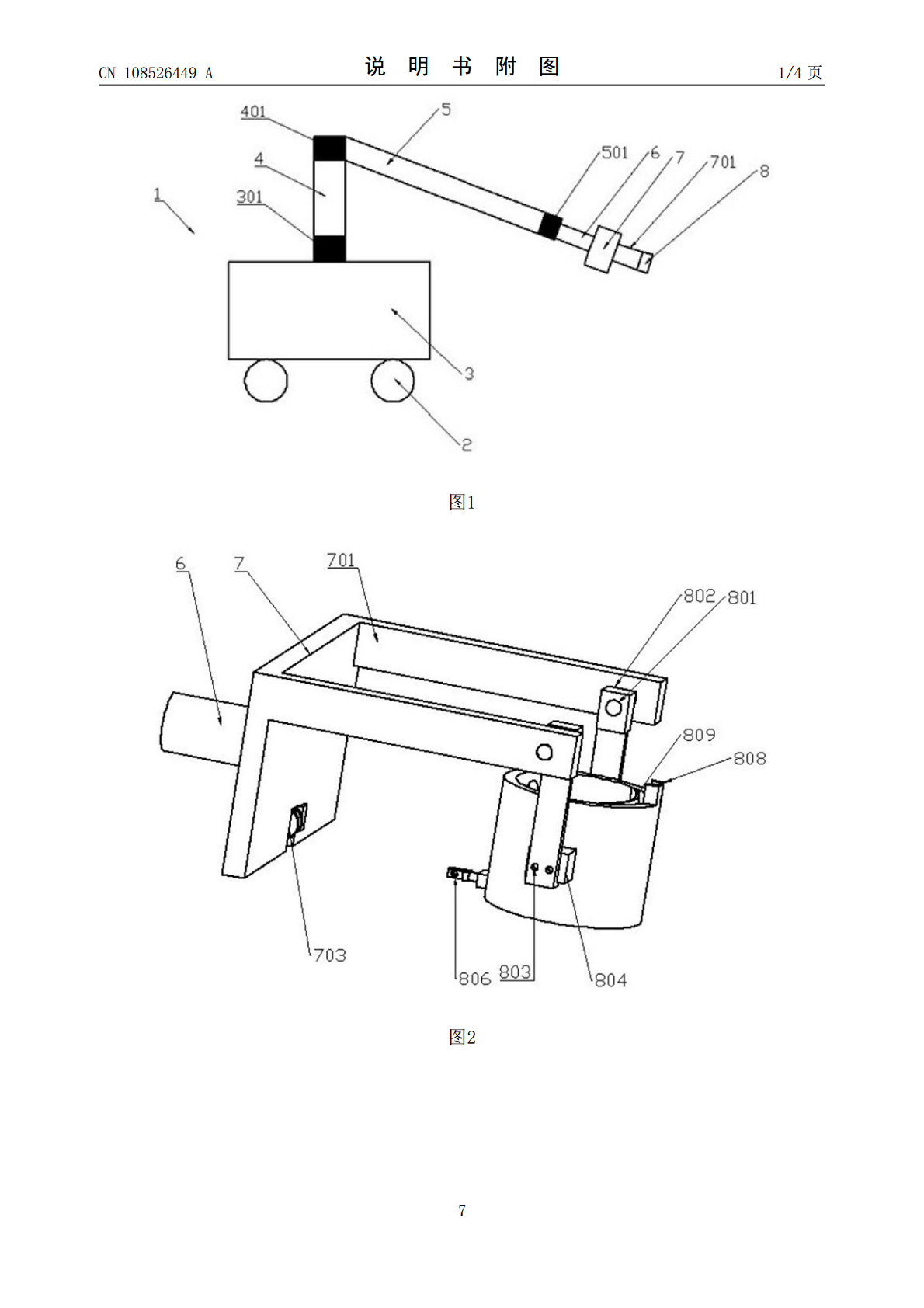
本发明公开了一种用于浇注的机械臂,属于铸造机械设备。包括三维运动装置和浇注装置,三维运动装置在摄像头指引下带动机械臂的上的浇注装置运动到作业位置,所述浇注装置包括支撑板和浇包,所述支撑板一侧的中心与三维运动装置上的第三支架连接,所述支撑板上设有第四支架和U型滚轮,所述浇包通过旋转轴固定在第四支架的第一轴承内,浇包在自然状态下是保持竖直向下的,连接绳套接于U型滚轮和浇包外侧面的第六支架上,当进行浇注时,连接绳在U型滚轮的带动下,浇包呈倾斜状态,金属液倒出,当U型滚轮反转时,浇包恢复到竖直状态,完成浇注过程。

一种浇注机械臂.pdf
本发明公开了一种浇注机械臂,包括支撑台,所述支撑台的顶部固定连接有横板,横板上滑动安装有移动板,所述移动板上固定安装有第一电机,第一电机的输出轴上套设有齿轮,横板的顶部固定连接有齿条,齿条与齿轮啮合,齿轮位于齿条的上方,移动板的顶部固定安装有推动管,推动管的顶部固定安装有原料箱,所述推动管的一端固定连接有输送软管,所述移动板的顶部分别固定安装有气缸和导向柱,导向柱上滑动安装有水平设置的升降台,气缸的活塞杆与升降台的底部固定连接,所述升降台的一侧开设有滑槽。本发明方便浇注原料的输送,浇注起来更方便,同时机械

一种浇注机械臂.pdf
本发明公开了一种浇注机械臂,涉及浇注装置技术领域,该浇注机械臂,包括料斗和安装板,所述安装板的内部开设有空腔,所述空腔的数量为两个,所述空腔的内壁与方块的表面活动连接,所述方块的顶部固定连接有L形螺杆,所述L形螺杆的数量为两个,所述空腔内壁的顶部开设有通槽,所述通槽的内壁与L形螺杆的表面活动连接,所述安装板的顶部固定连接有定位件。本发明通过设置方块、内螺纹管、第二螺栓和压块,以解决现有技术中,目前常见的熔融金属浇注用机械臂在使用时,调节两个支撑杆之间的距离较为不便,且在调节料斗的位置过程中,料斗容易晃动使

一种用于运货的机械臂.pdf
本发明公开了一种用于运货的机械臂,包括底座,所述底座的顶面焊接有竖直的支撑架,支撑架的一侧安装有滑轨,底座上通过螺钉固定安装有控制箱,控制箱位于支撑架的底部,控制箱的内部安装有直齿圆锥齿轮组合,直齿圆锥齿轮组合内插设有螺杆,螺杆竖直放置,且螺杆的杆体上套接有滑动座,滑动座远离滑轨的一侧通过紧固螺钉连接有安装架,安装架上安装有调整箱,调整箱的内部通过轴承安装有齿轮,调整箱的两侧边缘均设有滑槽,滑槽分列于齿轮的两侧,滑槽内均放置有齿条,齿条通过滑块与滑槽滑动连接,本发明通过机械传动,保证了机械臂对运输中的产品

一种用于打孔的机械臂.pdf
本实用新型涉及一种用于打孔的机械臂,包括底座和打孔装置,所述底座上端转动连接有凸台,所述凸台转动连接有纵臂,所述纵臂上端转动连接有横臂,所述横臂不与所述纵臂连接的一端转动连接有转臂,所述打孔装置包括推动装置,所述推动装置的输出端设有伸缩组件,所述伸缩组件的末端设有钻头,所述打孔装置设在所述转臂不与所述横臂连接的一端,采用此种用于打孔的机械臂,实现了提高打孔精度,同时还减轻劳动强度、提高施工效率。