
一种仓储机器人及其机械臂.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仓储机器人及其机械臂.pdf
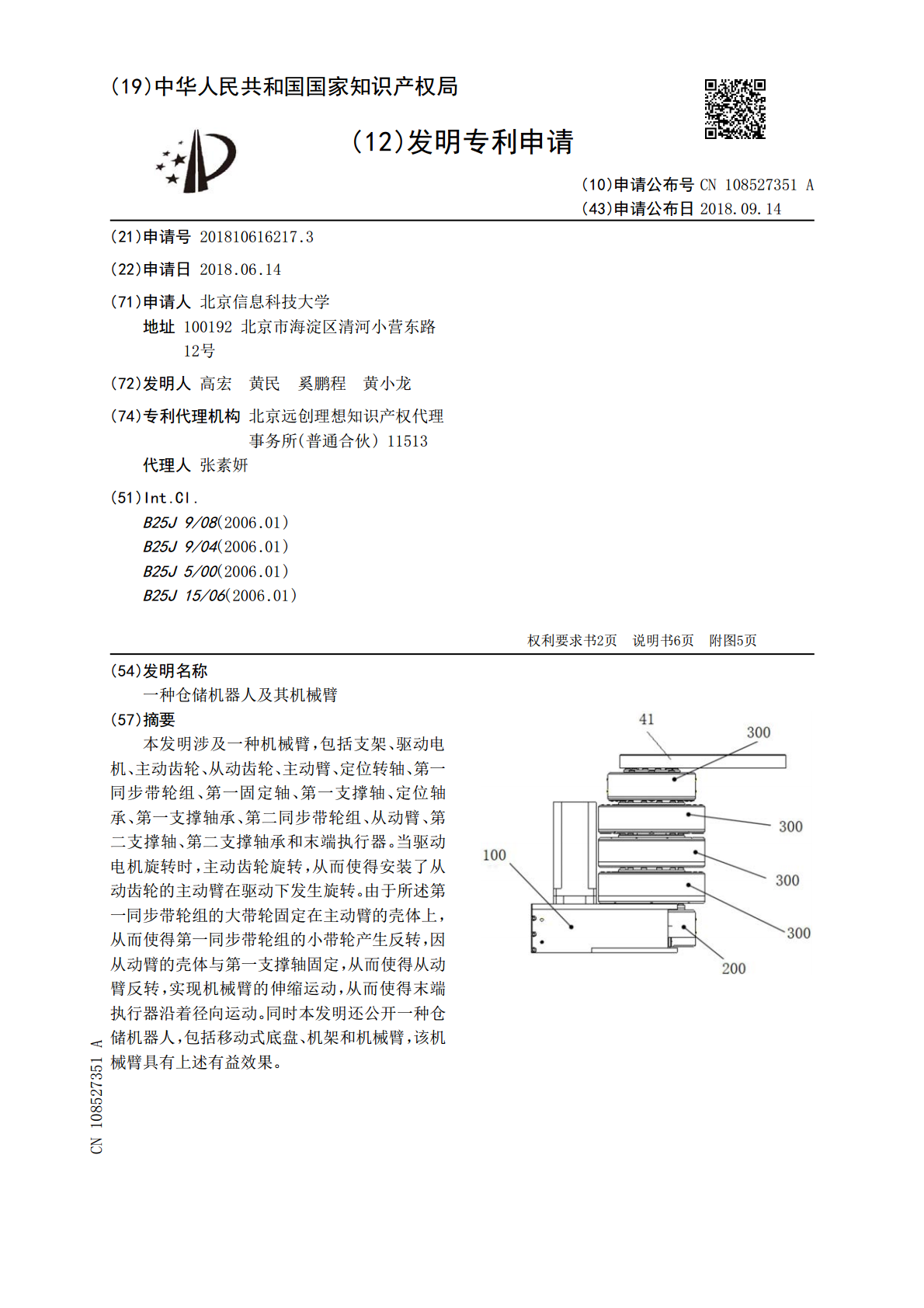
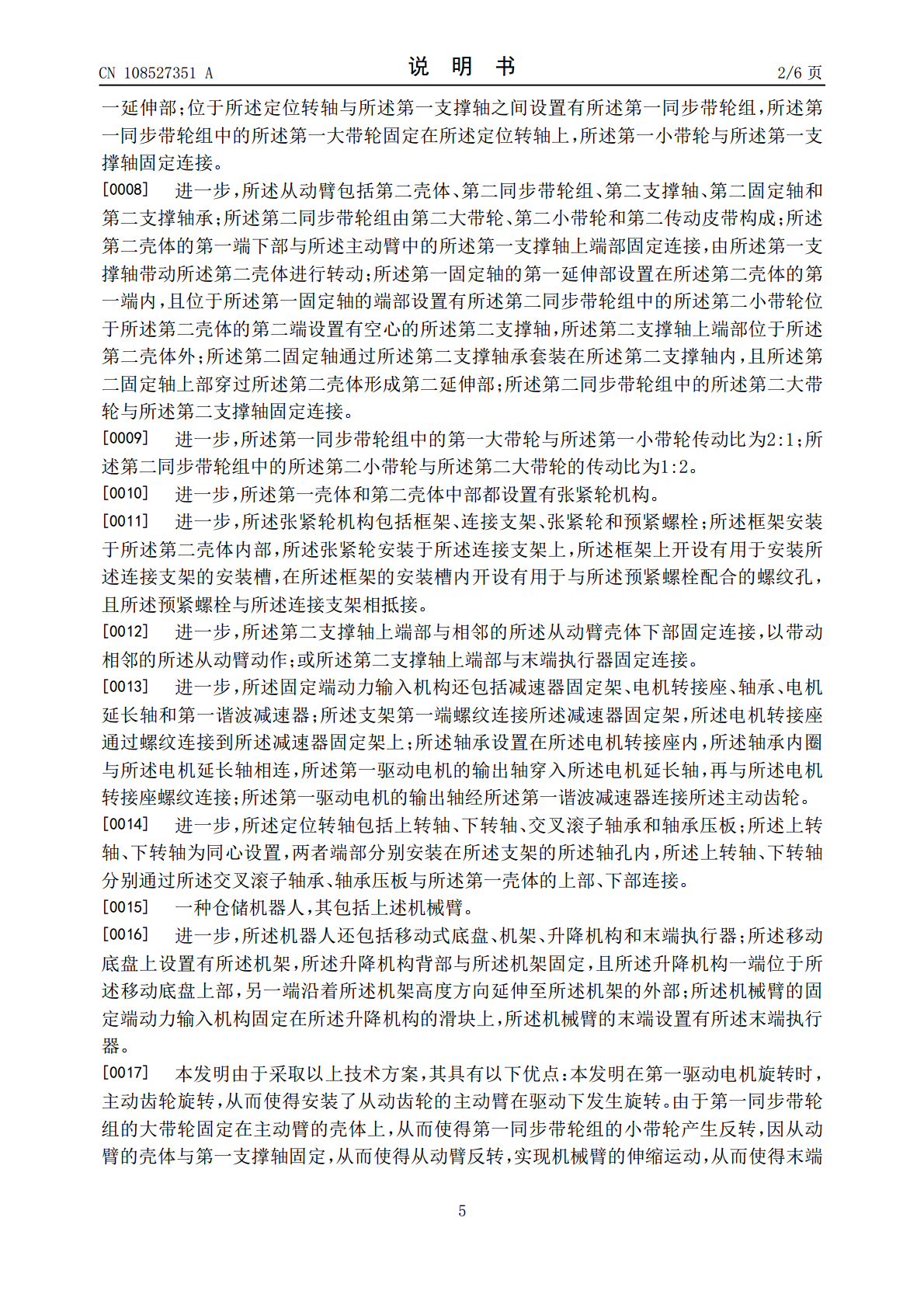
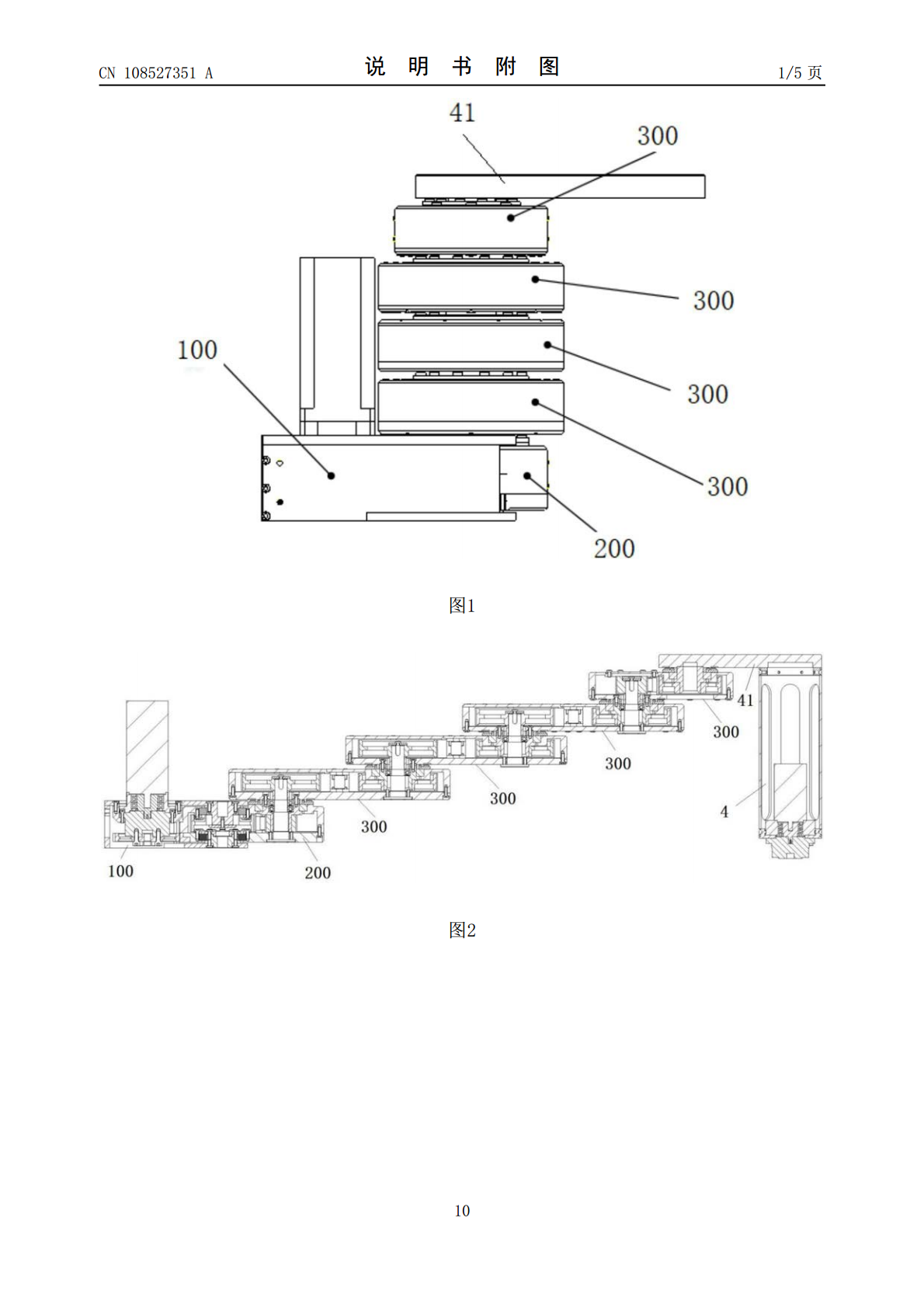
本发明涉及一种机械臂,包括支架、驱动电机、主动齿轮、从动齿轮、主动臂、定位转轴、第一同步带轮组、第一固定轴、第一支撑轴、定位轴承、第一支撑轴承、第二同步带轮组、从动臂、第二支撑轴、第二支撑轴承和末端执行器。当驱动电机旋转时,主动齿轮旋转,从而使得安装了从动齿轮的主动臂在驱动下发生旋转。由于所述第一同步带轮组的大带轮固定在主动臂的壳体上,从而使得第一同步带轮组的小带轮产生反转,因从动臂的壳体与第一支撑轴固定,从而使得从动臂反转,实现机械臂的伸缩运动,从而使得末端执行器沿着径向运动。同时本发明还公开一种仓储机

一种对物料计数的仓储机械臂及其工作方法.pdf
本发明公开了一种对物料计数的仓储机械臂,包括:滑轨底座、旋转基座、机械臂、称重台、驱动电机、传动齿轮箱、旋转链轮组、电磁夹头和储物料架,滑轨底座上方设置有旋转基座,旋转基座上设置有机械臂,机械臂一端设置有电磁夹头;所述旋转基座与机械臂铰接处设置有旋转链轮组;旋转基座一侧表面设置有承重台,旋转基座内部设置有驱动电机和传动齿轮箱;滑轨底座一侧设置有储物料架;还公开了一种对物料计数的仓储机械臂工作方法。其通过称重台对物料进行称重计数,实现了对仓储的分类和记录,不需要人力的辅助,自动化程度高,降低了人工成本;同时

手术机器人及其机械臂.pdf
本发明提供了一种手术机器人及机械臂;机械臂包括竖直移动关节、重力平衡机构和第一传动机构,竖直移动关节具有连接器以驱动外部构件沿竖直方向移动,重力平衡机构通过第一传动机构与连接器连接,以配平连接器和外部构件;重力平衡机构包括配平结构和第一柔性体,第一传动机构包括比例轮和第二柔性体,比例轮包括内轮和外轮;第一柔性体分别与配平结构和内轮连接,第二柔性体之第一本体围绕并部分固连外轮,第一本体的两端分别与第二柔性体之第一、二延伸部连接,第一本体围绕外轮的方向与第一柔性体连接内轮的方向相反,第一、二延伸部的另一端分别

手术机器人及其机械臂.pdf
本发明提供了一种手术机器人及机械臂;机械臂包括水平移动关节、竖直移动关节和第二传动机构,水平移动关节包括N个上下堆叠的水平移动模块,第一个水平移动模块用以连接外部固定架,其余用以沿水平方向运动,第m个水平移动模块滑动连接第m‑1个水平移动模块,第N个水平移动模块连接竖直移动关节,第二传动机构包括第二制动轮和第三柔性体,第二制动轮设于第N个水平移动模块上,第三柔性体的第二本体围绕并部分固连第二制动轮,第二本体的第三、四端分别与第三柔性体的第三、四延伸部的一端连接,第三、四延伸部的另一端分别与第一个水平移动模
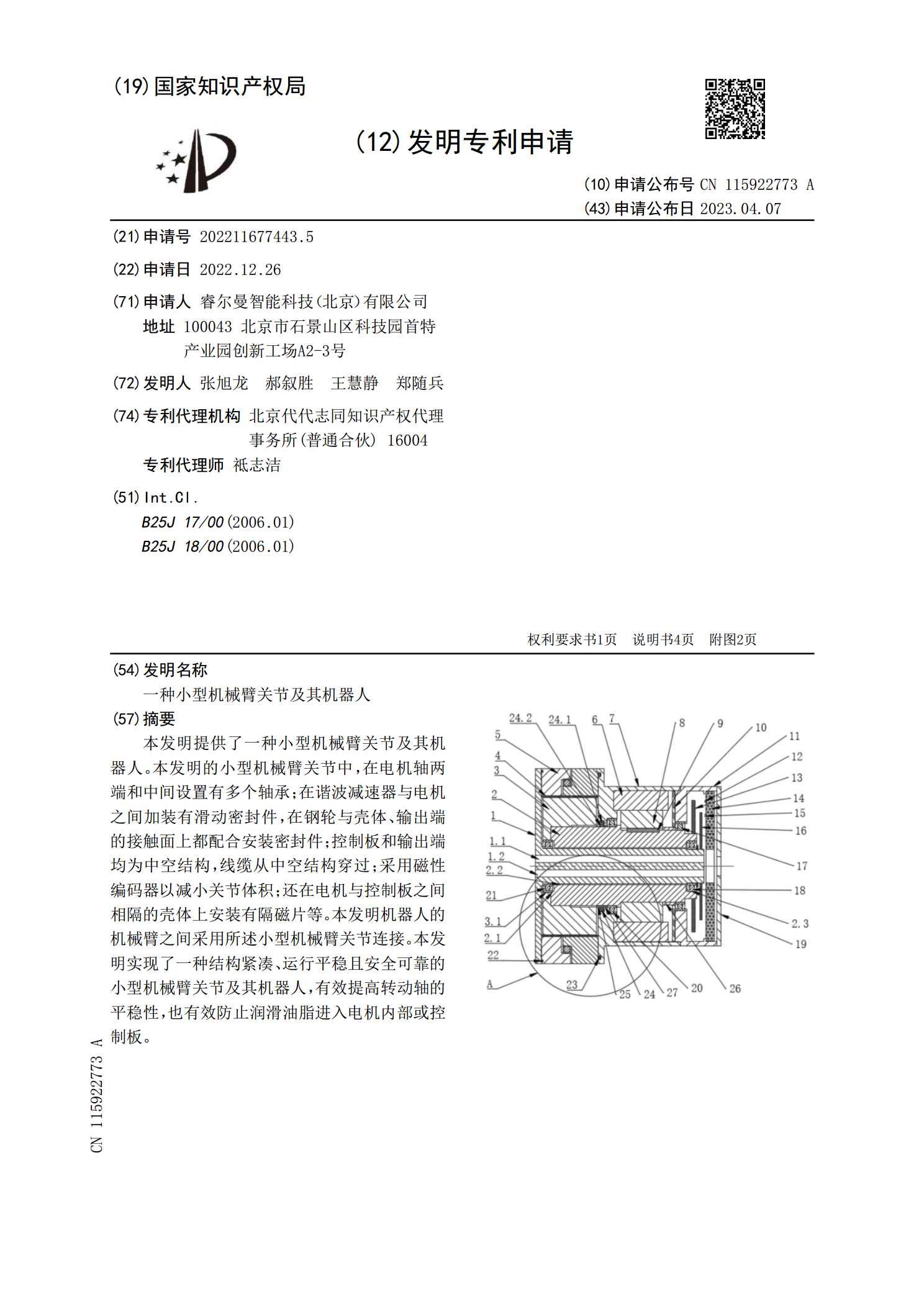
一种小型机械臂关节及其机器人.pdf
本发明提供了一种小型机械臂关节及其机器人。本发明的小型机械臂关节中,在电机轴两端和中间设置有多个轴承;在谐波减速器与电机之间加装有滑动密封件,在钢轮与壳体、输出端的接触面上都配合安装密封件;控制板和输出端均为中空结构,线缆从中空结构穿过;采用磁性编码器以减小关节体积;还在电机与控制板之间相隔的壳体上安装有隔磁片等。本发明机器人的机械臂之间采用所述小型机械臂关节连接。本发明实现了一种结构紧凑、运行平稳且安全可靠的小型机械臂关节及其机器人,有效提高转动轴的平稳性,也有效防止润滑油脂进入电机内部或控制板。