
一种机器人行走机构.pdf

一只****ng

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人行走机构.pdf
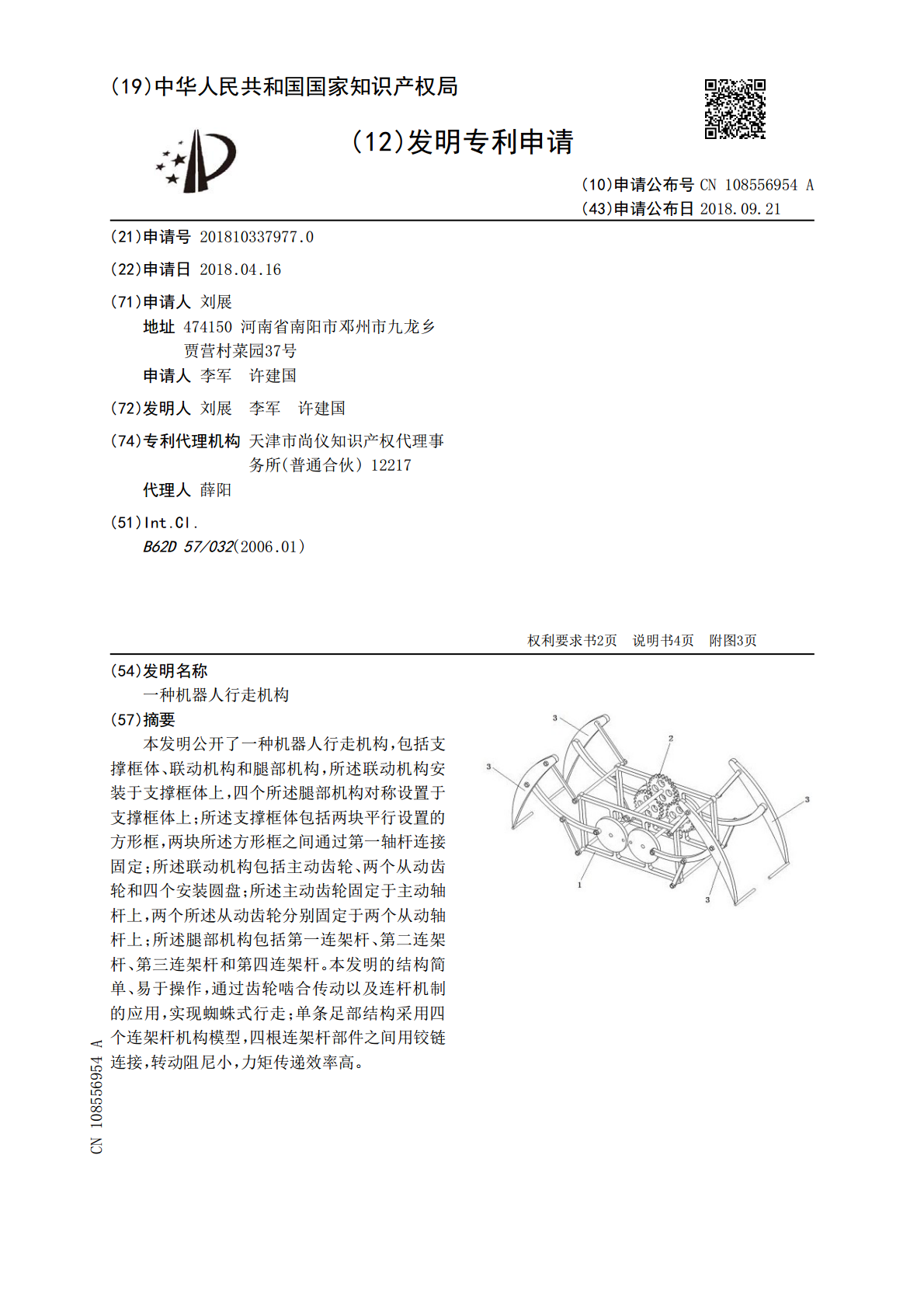
本发明公开了一种机器人行走机构,包括支撑框体、联动机构和腿部机构,所述联动机构安装于支撑框体上,四个所述腿部机构对称设置于支撑框体上;所述支撑框体包括两块平行设置的方形框,两块所述方形框之间通过第一轴杆连接固定;所述联动机构包括主动齿轮、两个从动齿轮和四个安装圆盘;所述主动齿轮固定于主动轴杆上,两个所述从动齿轮分别固定于两个从动轴杆上;所述腿部机构包括第一连架杆、第二连架杆、第三连架杆和第四连架杆。本发明的结构简单、易于操作,通过齿轮啮合传动以及连杆机制的应用,实现蜘蛛式行走;单条足部结构采用四个连架杆机
一种机器人行走机构.pdf
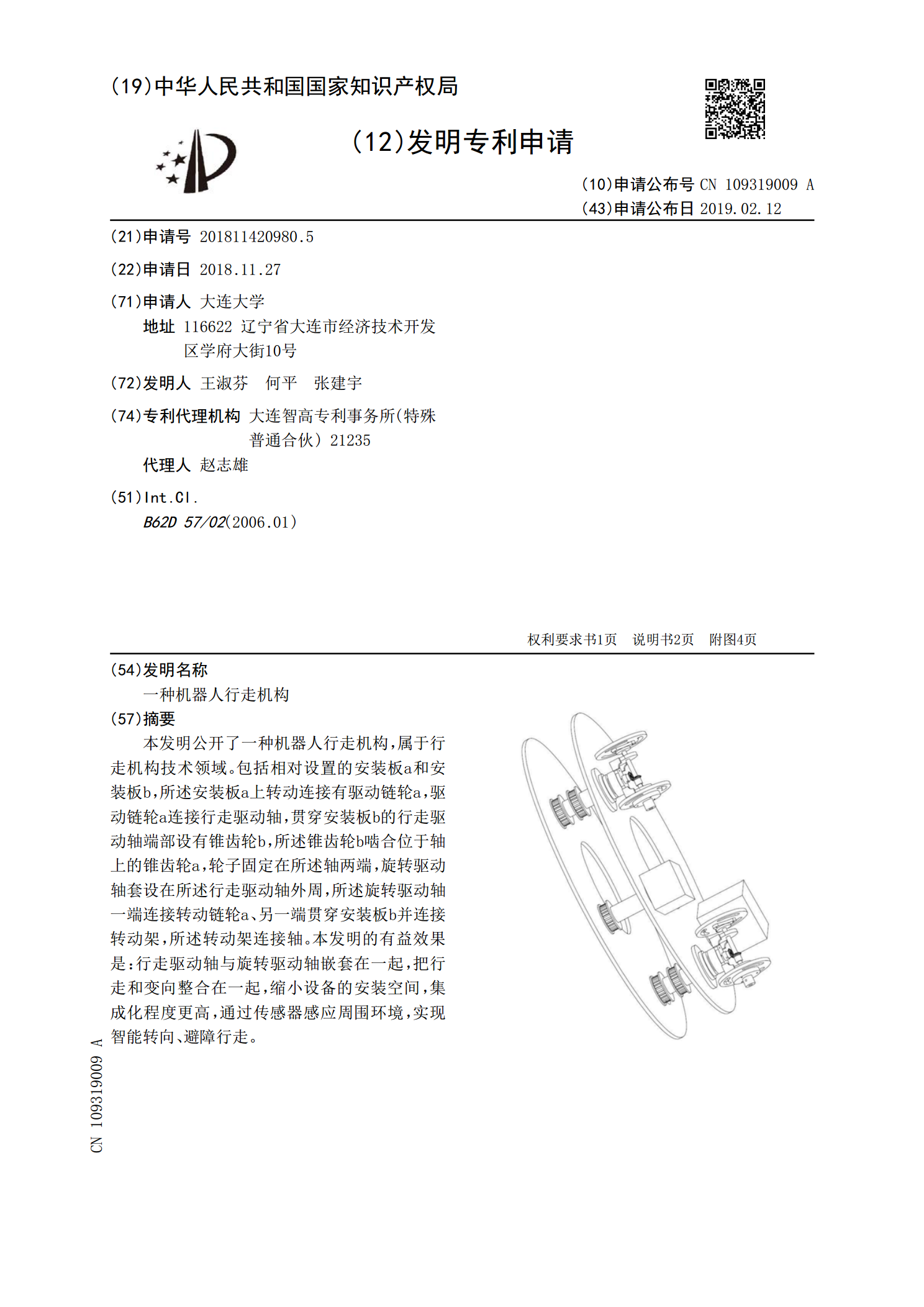
本发明公开了一种机器人行走机构,属于行走机构技术领域。包括相对设置的安装板a和安装板b,所述安装板a上转动连接有驱动链轮a,驱动链轮a连接行走驱动轴,贯穿安装板b的行走驱动轴端部设有锥齿轮b,所述锥齿轮b啮合位于轴上的锥齿轮a,轮子固定在所述轴两端,旋转驱动轴套设在所述行走驱动轴外周,所述旋转驱动轴一端连接转动链轮a、另一端贯穿安装板b并连接转动架,所述转动架连接轴。本发明的有益效果是:行走驱动轴与旋转驱动轴嵌套在一起,把行走和变向整合在一起,缩小设备的安装空间,集成化程度更高,通过传感器感应周围环境,实
一种机器人行走机构.pdf
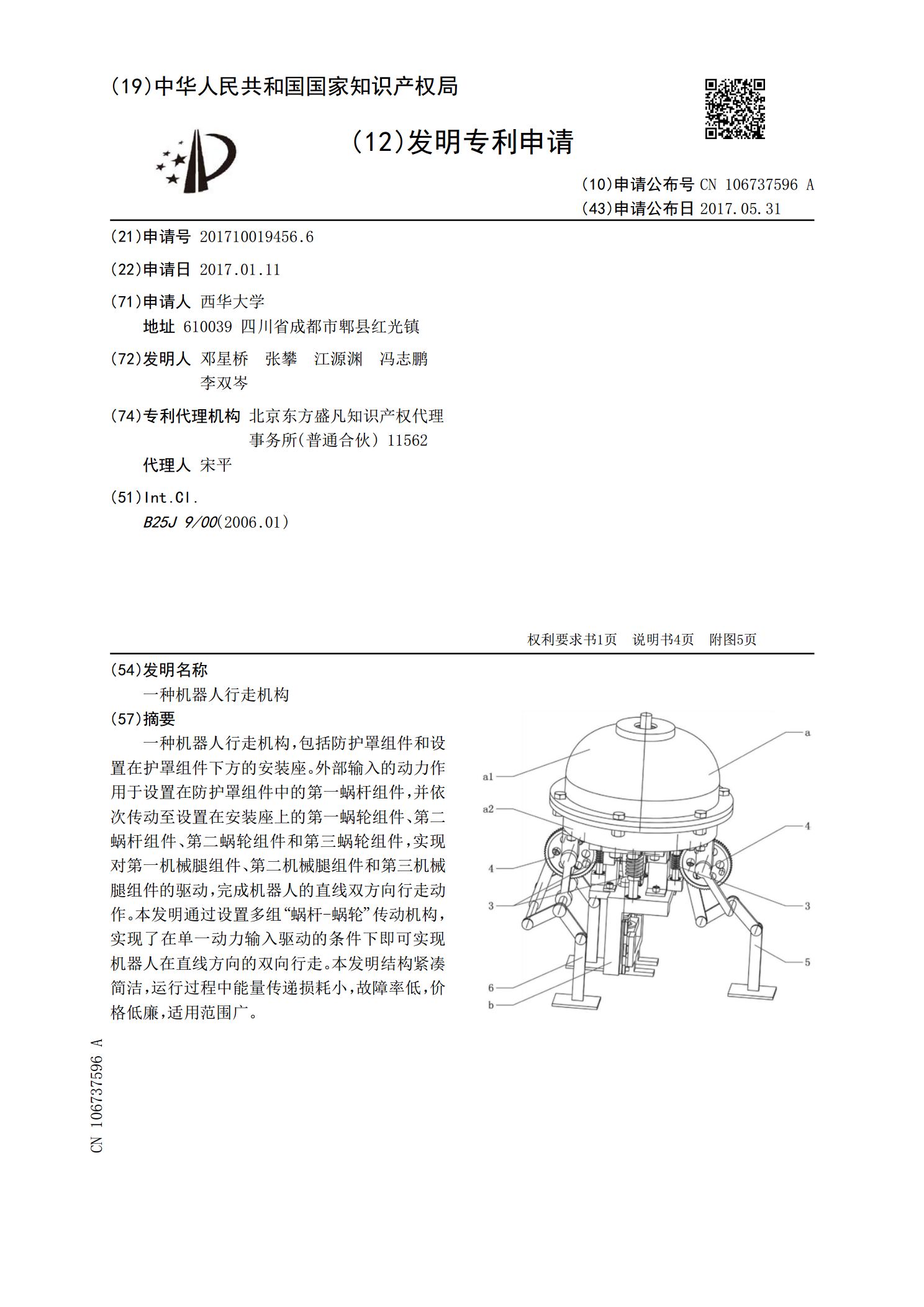
一种机器人行走机构,包括防护罩组件和设置在护罩组件下方的安装座。外部输入的动力作用于设置在防护罩组件中的第一蜗杆组件,并依次传动至设置在安装座上的第一蜗轮组件、第二蜗杆组件、第二蜗轮组件和第三蜗轮组件,实现对第一机械腿组件、第二机械腿组件和第三机械腿组件的驱动,完成机器人的直线双方向行走动作。本发明通过设置多组“蜗杆‑蜗轮”传动机构,实现了在单一动力输入驱动的条件下即可实现机器人在直线方向的双向行走。本发明结构紧凑简洁,运行过程中能量传递损耗小,故障率低,价格低廉,适用范围广。
一种机器人行走机构.pdf
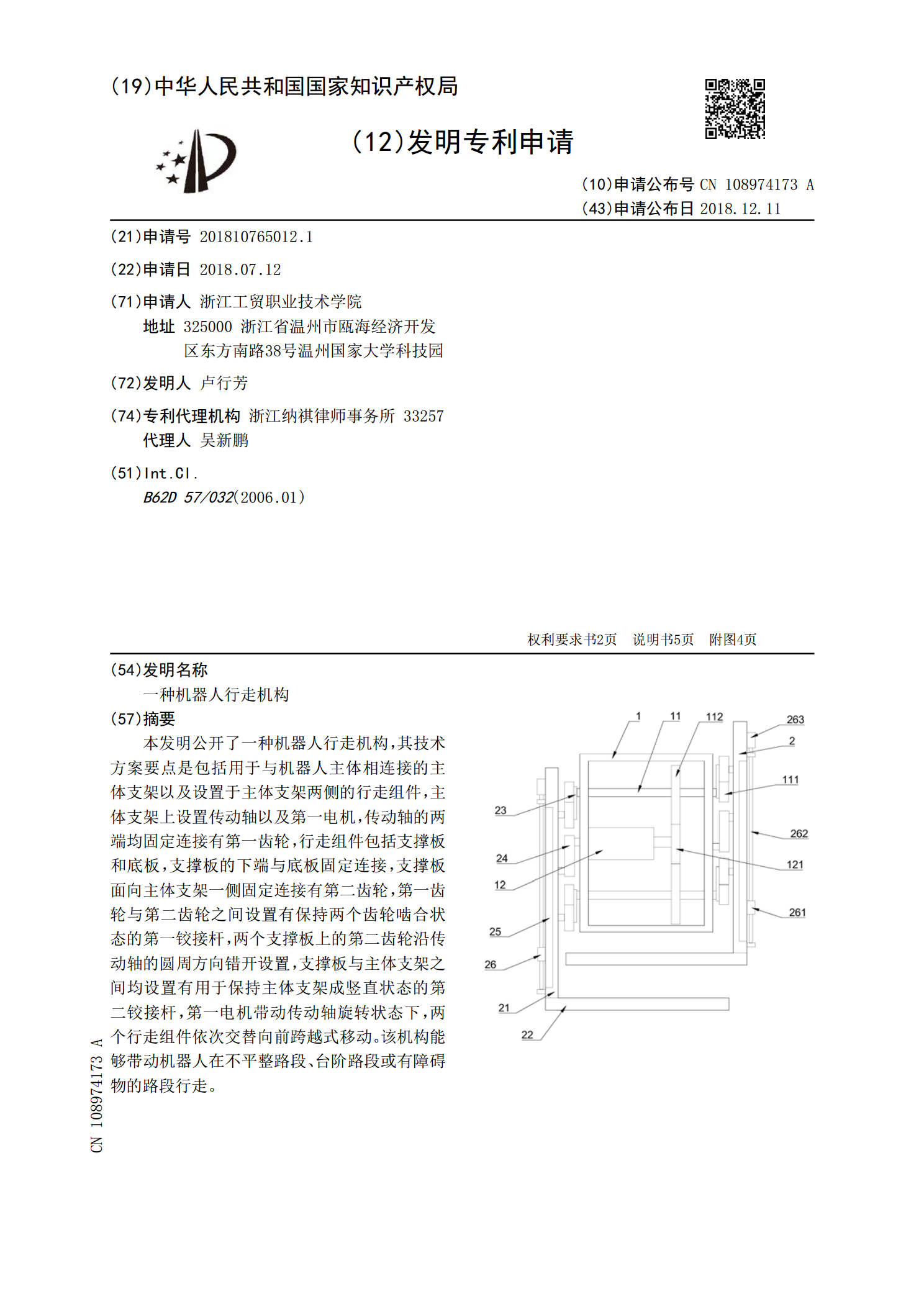
本发明公开了一种机器人行走机构,其技术方案要点是包括用于与机器人主体相连接的主体支架以及设置于主体支架两侧的行走组件,主体支架上设置传动轴以及第一电机,传动轴的两端均固定连接有第一齿轮,行走组件包括支撑板和底板,支撑板的下端与底板固定连接,支撑板面向主体支架一侧固定连接有第二齿轮,第一齿轮与第二齿轮之间设置有保持两个齿轮啮合状态的第一铰接杆,两个支撑板上的第二齿轮沿传动轴的圆周方向错开设置,支撑板与主体支架之间均设置有用于保持主体支架成竖直状态的第二铰接杆,第一电机带动传动轴旋转状态下,两个行走组件依次交

一种机器人行走机构.pdf
本发明公开了一种机器人行走机构,包括底盘,所述底盘的前部的左右两侧和底盘后部的左右两侧各设有一个行走腿,所述底盘内固定有两个双头步进电机,所述双头步进电机的四个主轴分别与四个行走腿固定相连,所述每根行走腿上均设有一个旋转步进电机,所述旋转步进电机的主轴分别与一个带轮连接板固定连接,所述每块带轮连接板上均有一个滚动步进电机,所述滚动步进电机的外部套接有一个主动带轮,所述主动带轮上设有转轴,所述转轴与滚动步进电机的主轴固定连接,所述旋转步进电机的外围套接有一个从动带轮,所述从动带轮和主动带轮之间设有同步带。本