
一种叶片焊接用自动化夹持装置.pdf

努力****向丝

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种叶片焊接用自动化夹持装置.pdf
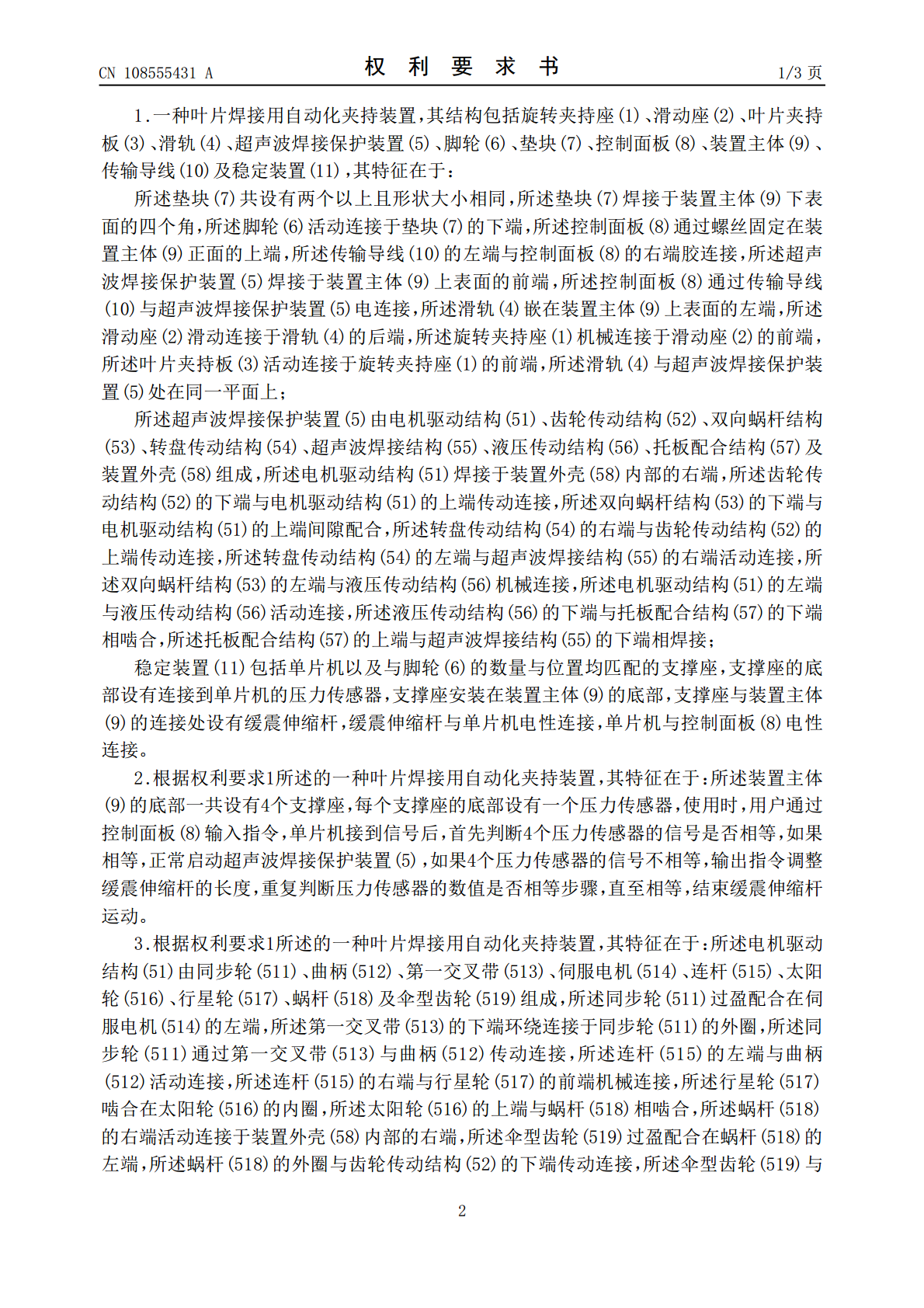
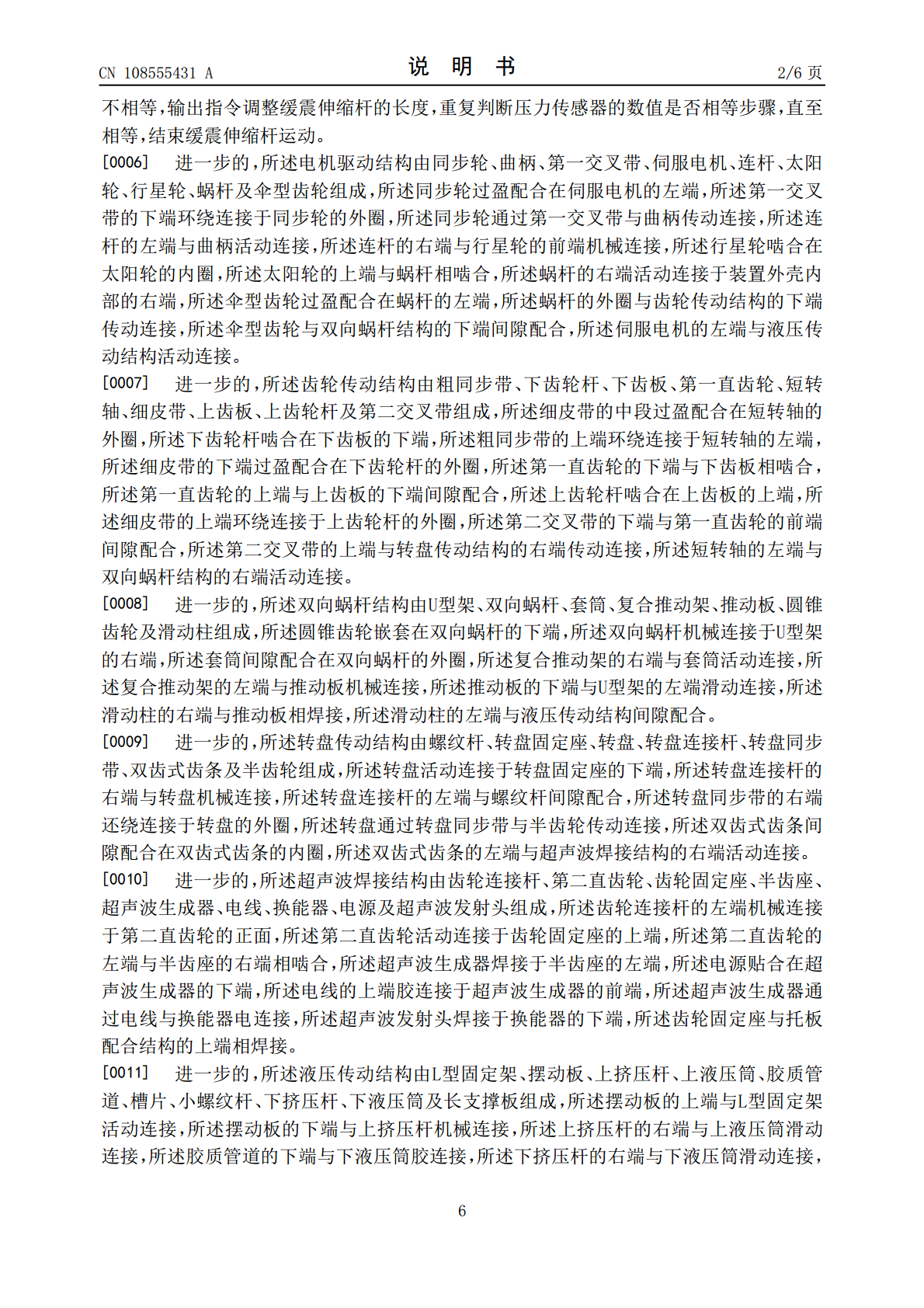
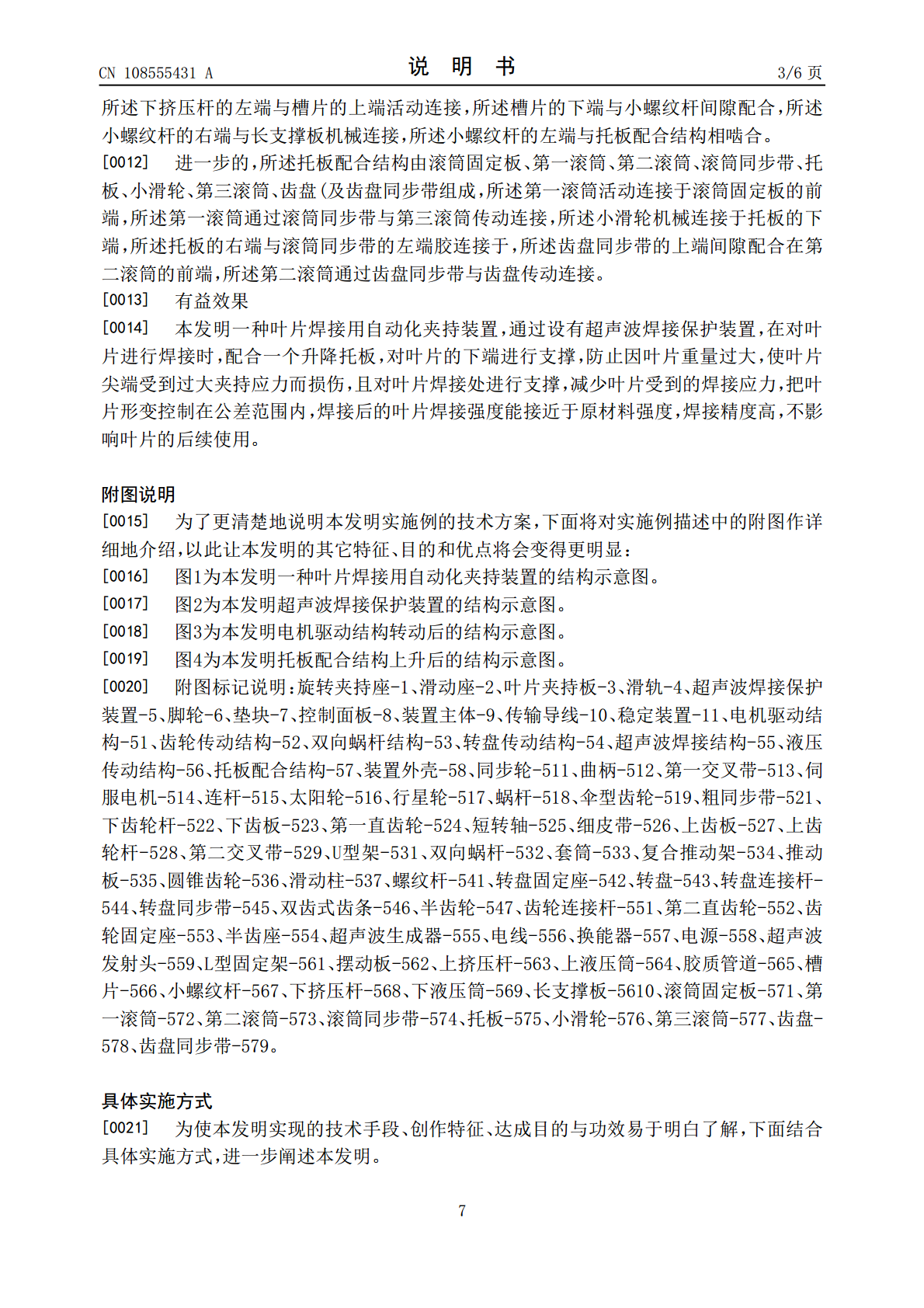
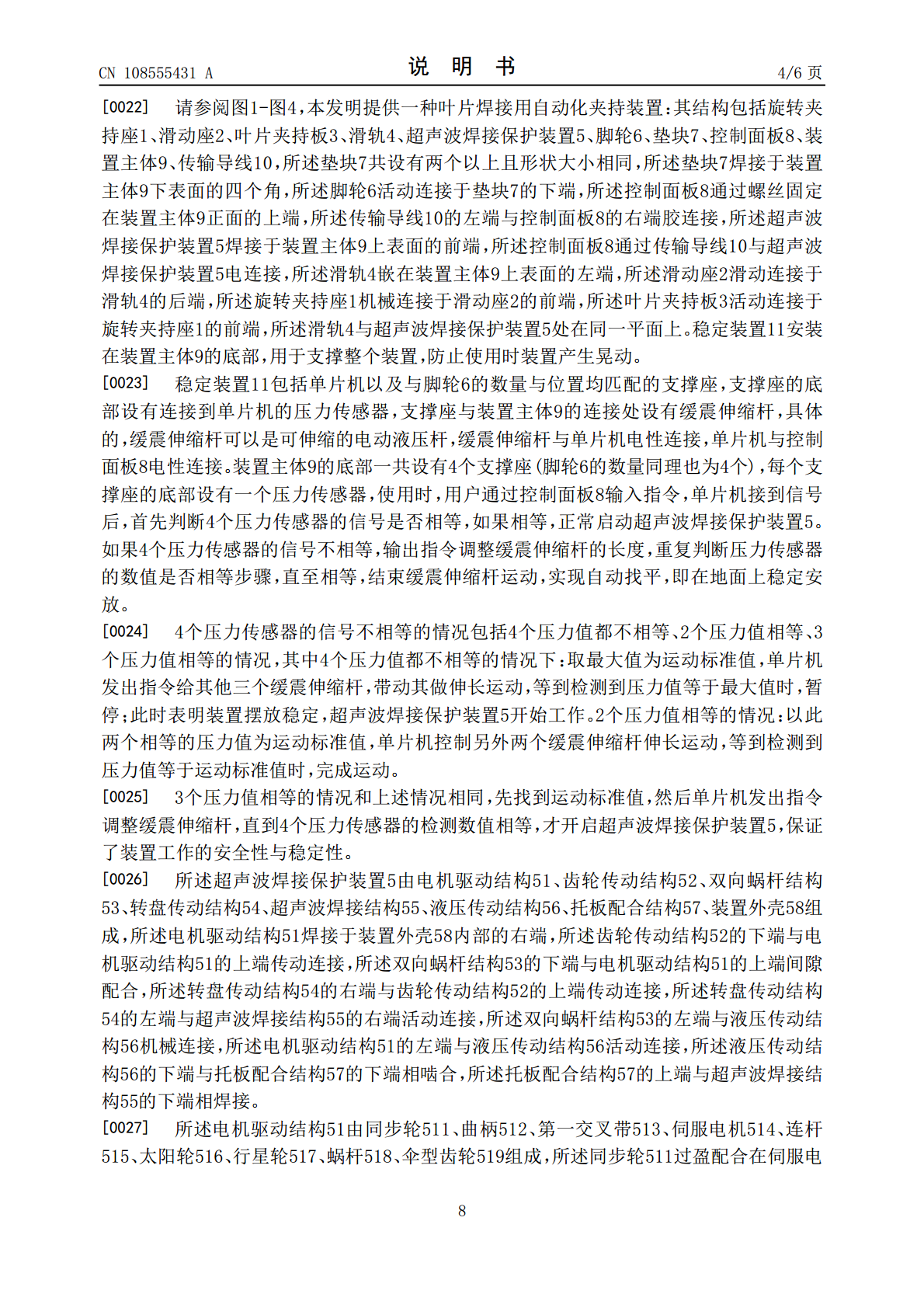
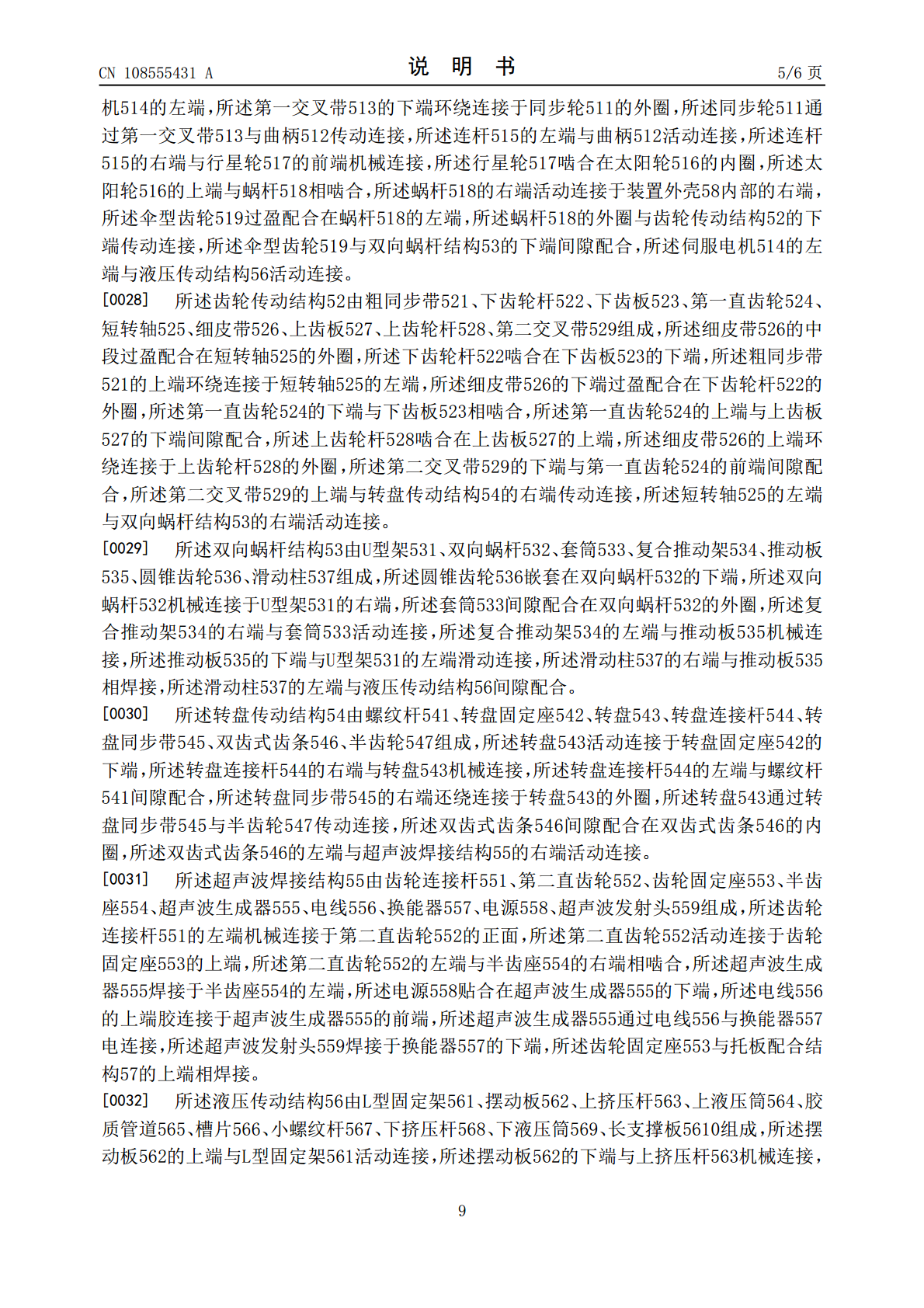
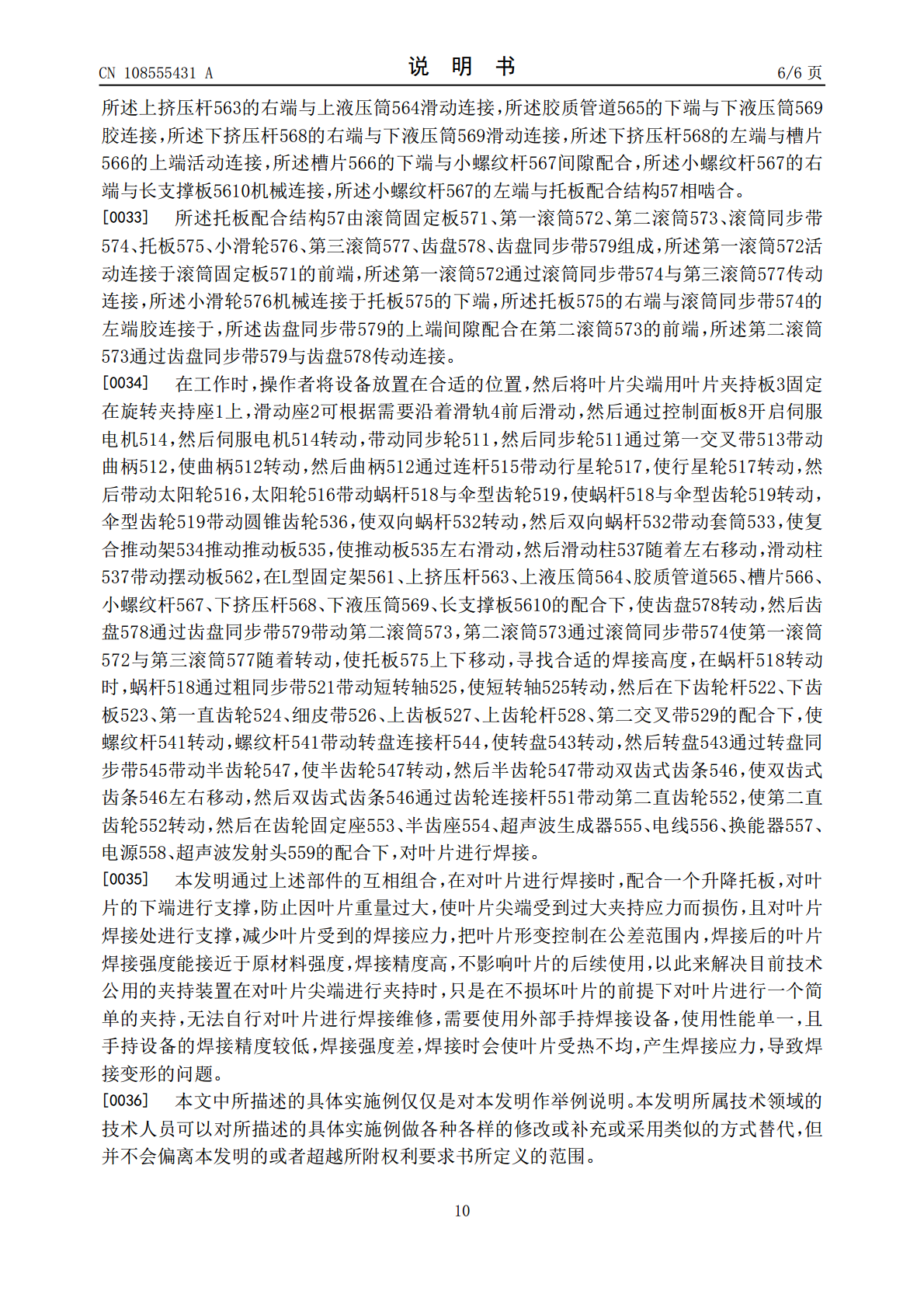
本发明公开了一种叶片焊接用自动化夹持装置,包括旋转夹持座、滑动座、叶片夹持板、滑轨、超声波焊接保护装置、脚轮、垫块、控制面板、装置主体、传输导线及稳定装置,所述超声波焊接保护装置由电机驱动结构、齿轮传动结构、双向蜗杆结构、转盘传动结构、超声波焊接结构、液压传动结构、托板配合结构及装置外壳组成,稳定装置包括单片机以及与脚轮的数量与位置均匹配的支撑座,支撑座的底部设有连接到单片机的压力传感器,支撑座安装在装置主体的底部,支撑座与装置主体的连接处设有缓震伸缩杆。本发明能够减少叶片受到的焊接应力,把叶片形变控制在

一种绞龙叶片焊接用夹持结构.pdf
本发明提供一种绞龙叶片焊接用夹持结构,包括旋转盘,旋转盘的一端设有支撑杆,支撑杆的一侧设有活动爪和限位爪,限位爪的一端设有按压板,按压板的内部设有旋转轴承,按压板的一端设有挤压柱,按压板的一端设置有限位槽,限位槽的一端设有旋转架,通过设置有按压板三分之二位置安装有旋转轴承,使得按压板上端受到重力挤压时,按压板通过重力倾斜进行旋转,并按压板带动挤压柱进行旋转,随后挤压柱挤压旋转架的一侧,旋转架通过杠杆原理带动内滑动架呈垂直方向移动,且能够通过内滑动架带动轴承进行旋转,并再次通过杠杆原理带动外滑动架一侧的活动
一种焊接用夹持机构、夹持装置及系统.pdf
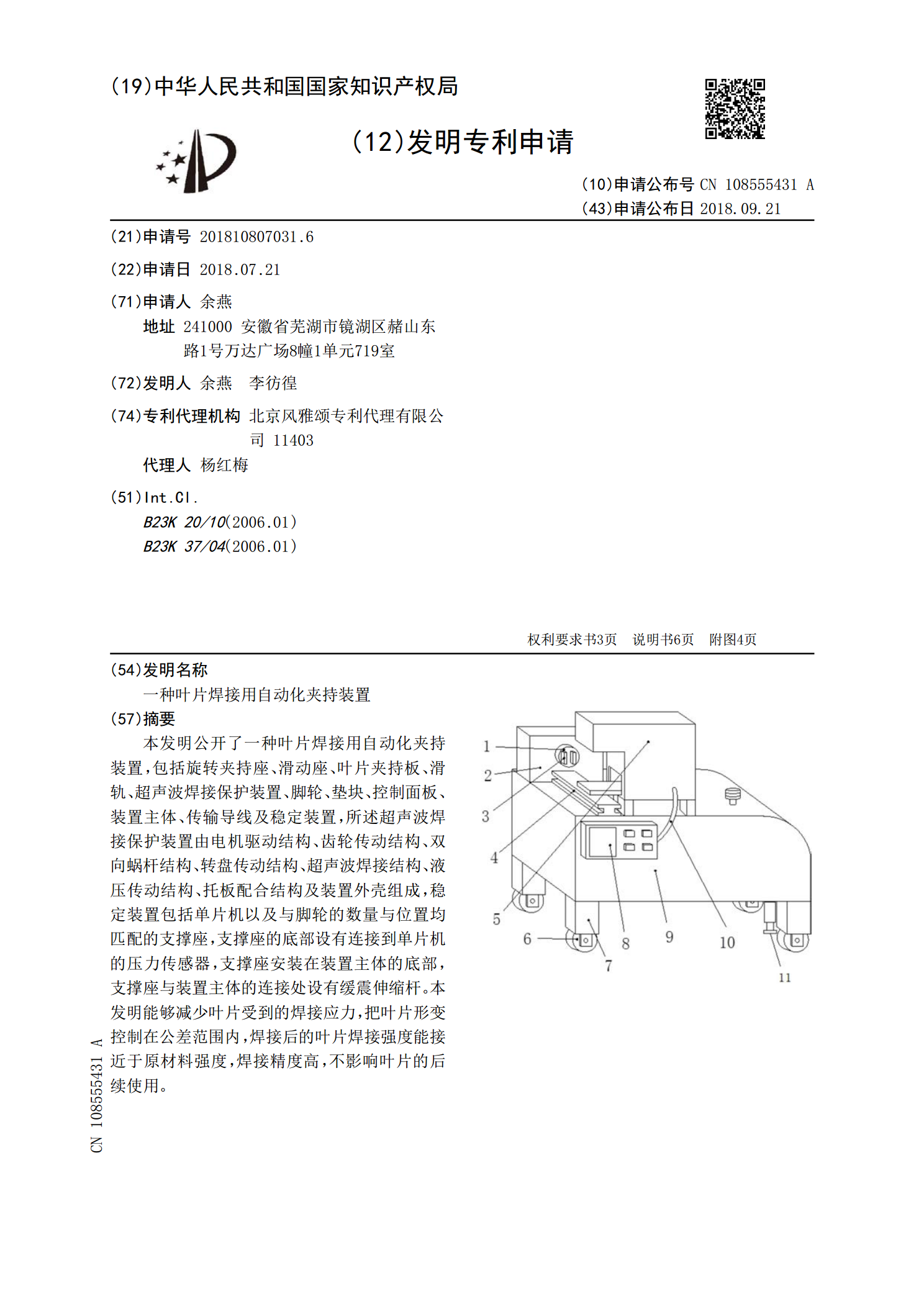
本实用新型提供了一种焊接用夹持机构、夹持装置及系统,涉及焊接设备领域,焊接用夹持机构包括支架、驱动组件以及两组夹臂组件,驱动组件同步带动两组夹臂组件向中部靠拢,直至两组夹臂组件夹持锁定待焊接工件,有效解决空间异形管道的夹持定位问题;夹持装置包括夹持机构、底座、翻转机构以及转动机构,而翻转机构驱动转动机构翻转,转动机构驱动转盘和夹持机构转动,且转动机构的翻转轴线与转盘的转动轴线相垂直,进而保证焊缝旋转中心和夹持旋转中心重合,从而实现自动化焊接,保证焊接质量。
风电叶片叶尖自动化夹持装置.pdf
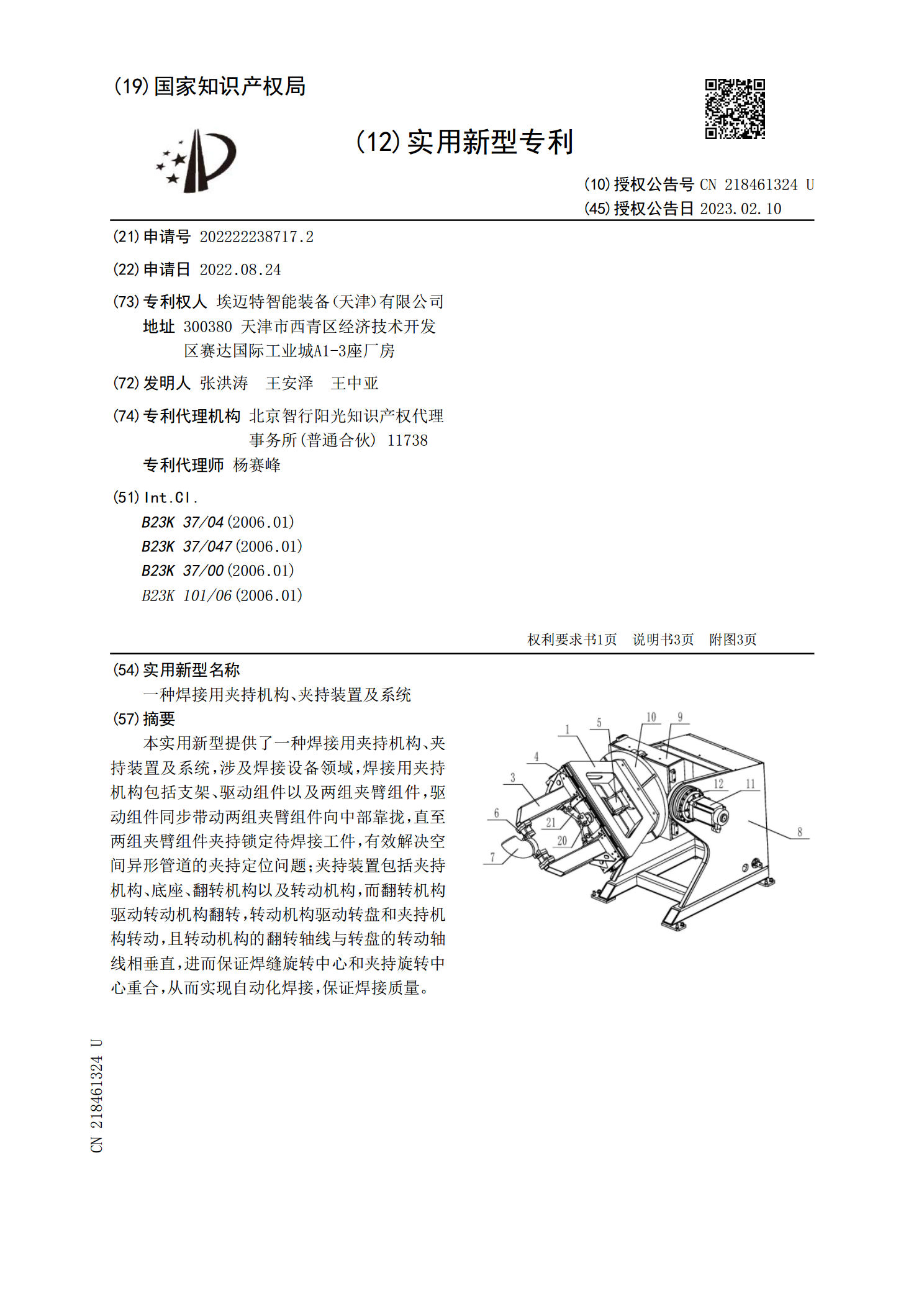
本发明提供一种风电叶片叶尖自动化夹持装置,包括:主动夹持座、被动夹持座、平移支架、底座支架、第一驱动机构、直线导轨、承重滚轮;在底部支架的底部设有承重滚轮;在底部支架上设置直线导轨;所述平移支架架设在直线导轨上;底部支架上安装有第一驱动机构,所述第一驱动机构连接平移支架,用于推动平移支架沿直线导轨移动;主动夹持座和被动夹持座相对而设在平移支架的顶部,主动夹持座和被动夹持座的内侧相对面上均设置缓冲夹持板;在主动夹持座上设置横推驱动机构,所述横推驱动机构连接主动夹持座上的缓冲夹持板。该装置可以消除风电叶片在打
一种金属管焊接用夹持装置.pdf
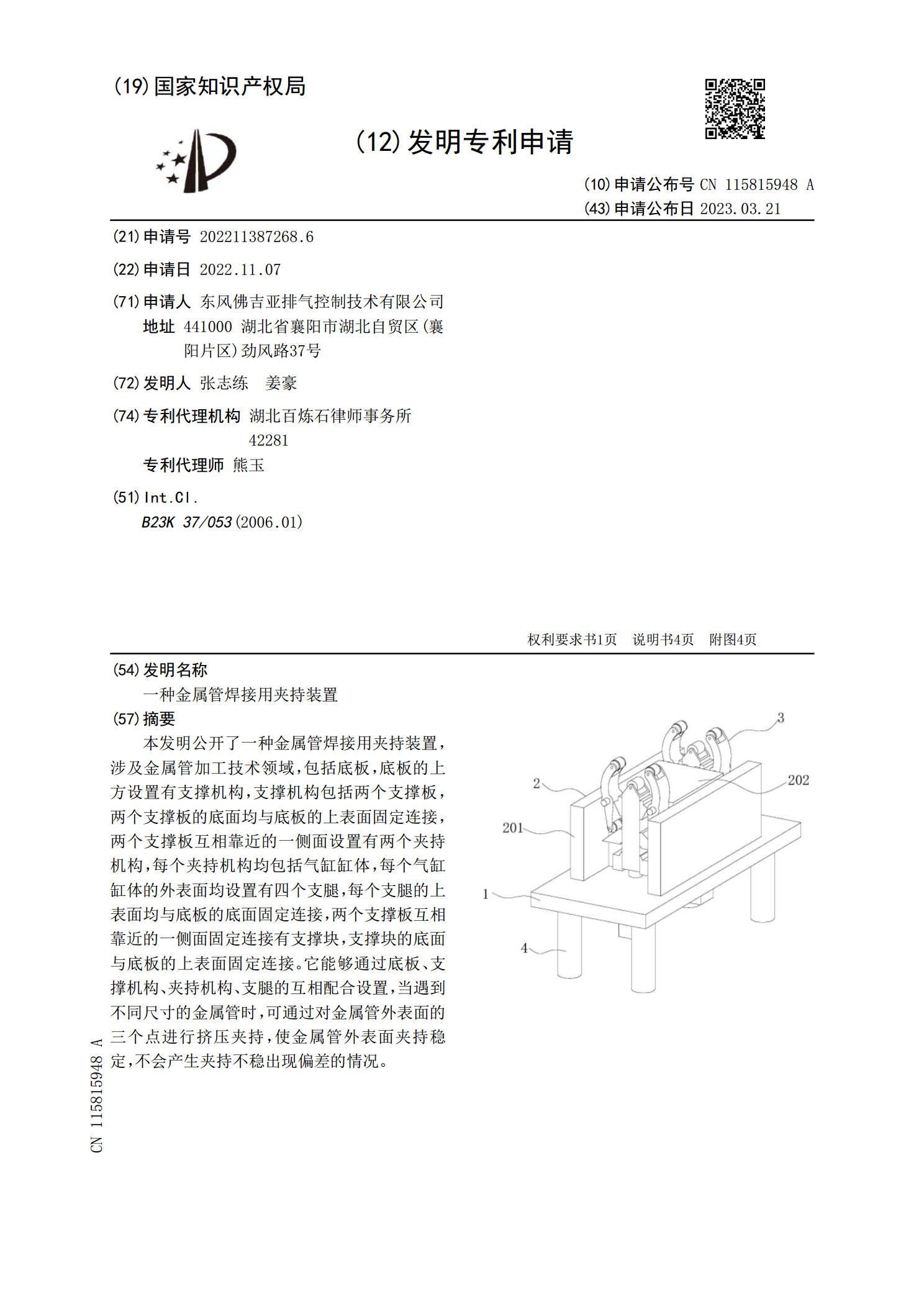
本发明公开了一种金属管焊接用夹持装置,涉及金属管加工技术领域,包括底板,底板的上方设置有支撑机构,支撑机构包括两个支撑板,两个支撑板的底面均与底板的上表面固定连接,两个支撑板互相靠近的一侧面设置有两个夹持机构,每个夹持机构均包括气缸缸体,每个气缸缸体的外表面均设置有四个支腿,每个支腿的上表面均与底板的底面固定连接,两个支撑板互相靠近的一侧面固定连接有支撑块,支撑块的底面与底板的上表面固定连接。它能够通过底板、支撑机构、夹持机构、支腿的互相配合设置,当遇到不同尺寸的金属管时,可通过对金属管外表面的三个点进行