
管道异物打捞机器人.pdf

Ja****23


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管道异物打捞机器人.pdf
本发明公开一种管道异物打捞机器人,包括探测部、伸缩部、尾部和行走组件,所述探测部设有摄像头和至少一个超声波传感器,所述伸缩部可伸缩的连接于探测部和尾部之间,所述行走组件包括两组,分别设于探测部和尾部,每组所述行走组件包括两组行走轮架,两组行走轮架错位分布,所述探测部还设有探测辅助组件和机械手,所述机械手设于探测辅助组件内,且所述机械手可由探测辅助组件内探出或缩回,所述机械手设有钩杆,所述钩杆设有倒钩。本发明的管道异物打捞机器人,能够适应各类管道,尺寸小,可拐弯或伸缩,可捞起各种异物,清理能力强。

水下异物打捞装置.pdf
本发明提供一种轻型水下异物打捞装置。该装置包括支撑架,设置在支撑架内的潜水电机和潜水泵,潜水泵一端与潜水电机相连接,潜水泵另一端与收集管相连接;所述的收集管包括相连接的连接管和收集口,滤网设置在连接管内部;所述的收集口为直型收集口或弯曲型收集口。本发明将潜水泵、水下真空吸尘技术与净化技术结合起来应用于核电设施的水下异物清除,异物的打捞、收集均在水下完成。本发明适用于堆芯及堆芯水池、乏燃料水池、燃料组件中(或上)的异物(直径0.1mm~40mm、重量≤1kg)的清除。

基于μCOS-Ⅱ水下异物打捞机器人控制系统的设计.docx
基于μCOS-Ⅱ水下异物打捞机器人控制系统的设计随着人类社会的发展,水下资源的开发与利用越来越重要。然而,在水下操作中,异物(如海底垃圾、沉船等)常常对环境以及海洋生物造成巨大的伤害,因此水下异物打捞机器人的设计与制造变得非常重要。本文将介绍一种基于μCOS-Ⅱ的水下异物打捞机器人控制系统的设计方案。一、设计方案该控制系统主要包括硬件部分和软件部分两部分。硬件部分主要包括控制器、传感器、执行器、通讯模块、电源模块等:控制器:使用ARMCortex-M3内核的LPC1758芯片,具有较强的计算能力和广泛的通
打捞机器人.pdf
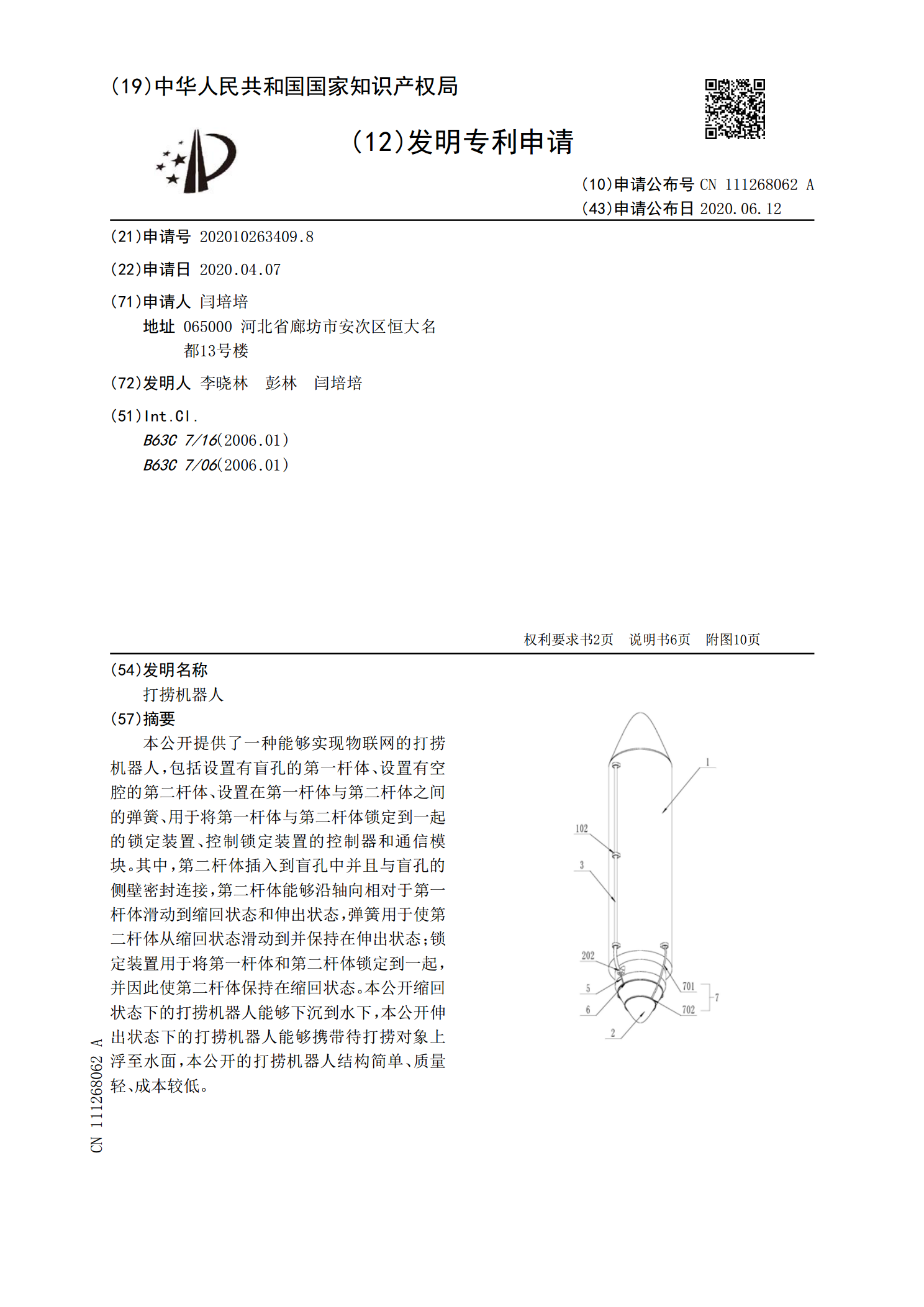
本公开提供了一种能够实现物联网的打捞机器人,包括设置有盲孔的第一杆体、设置有空腔的第二杆体、设置在第一杆体与第二杆体之间的弹簧、用于将第一杆体与第二杆体锁定到一起的锁定装置、控制锁定装置的控制器和通信模块。其中,第二杆体插入到盲孔中并且与盲孔的侧壁密封连接,第二杆体能够沿轴向相对于第一杆体滑动到缩回状态和伸出状态,弹簧用于使第二杆体从缩回状态滑动到并保持在伸出状态;锁定装置用于将第一杆体和第二杆体锁定到一起,并因此使第二杆体保持在缩回状态。本公开缩回状态下的打捞机器人能够下沉到水下,本公开伸出状态下的打捞

气管道异物阻塞的应急措施.docx
气管道异物阻塞的应急措施气管道异物阻塞的应急措施根据国内资料分析,由意外损伤造成的死因中主要为意外窒息,占婴儿意外死亡中的90%,而导致窒息的主要原因就是气道异物阻塞,使孩子的'呼吸完全不能进行。因此,意外一旦发生几乎没有入院急救的机会。婴幼儿发生气道异物阻塞,马上送医院抢救可能时间不够,因此,父母首要做的是进行应急处理,为送孩子去医院争夺时间。由此可见,父母、保姆或者幼教老师能掌握一些简单的处理方法何其重要。气道异物阻塞的紧急处理措施鼓励孩子大声咳嗽引起窒息的异物多卡在喉咙,特别像薄膜、果冻类异物,通常