
一种汽车危险工况的界定与避撞控制方法.pdf

骊英****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽车危险工况的界定与避撞控制方法.pdf
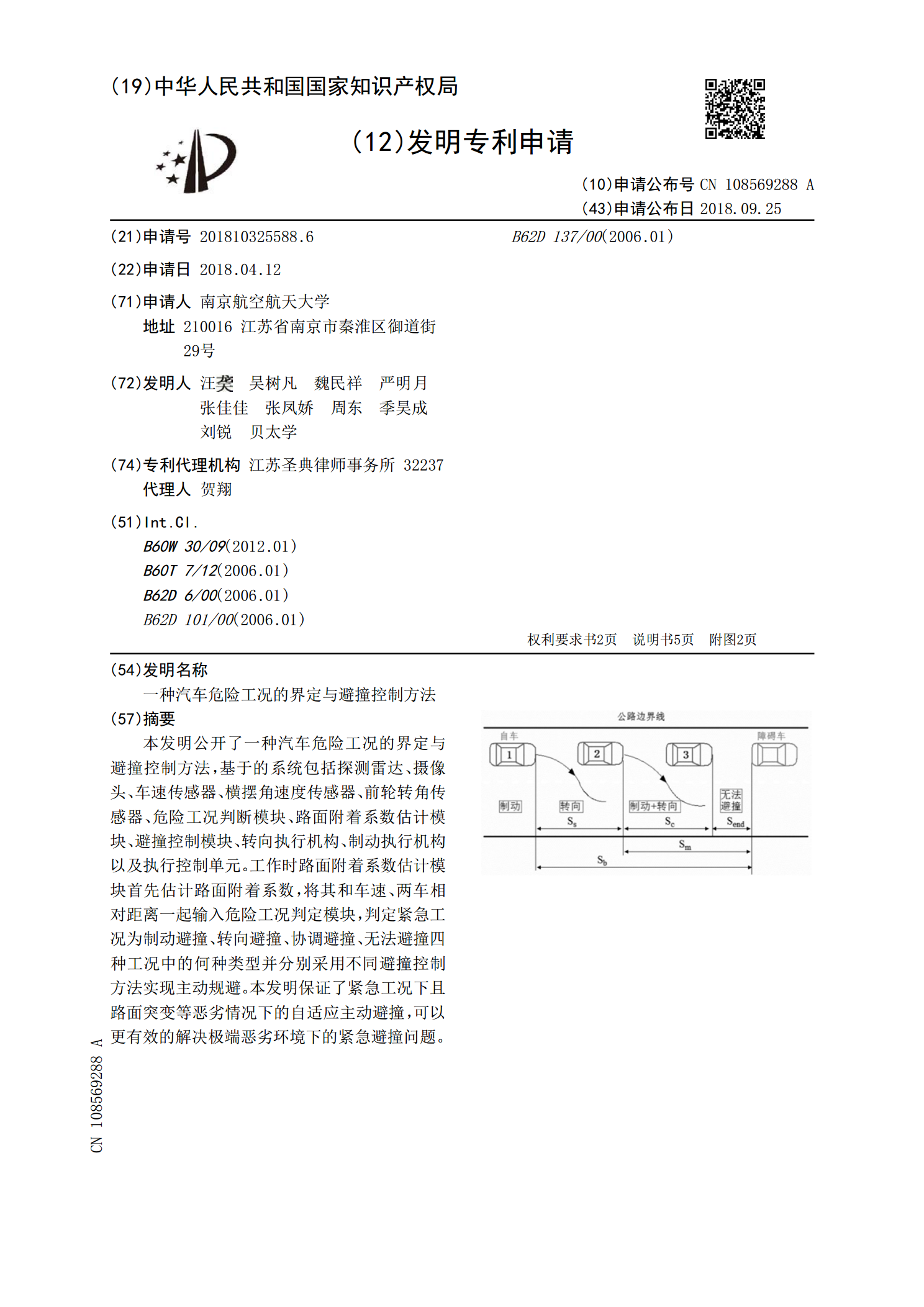
本发明公开了一种汽车危险工况的界定与避撞控制方法,基于的系统包括探测雷达、摄像头、车速传感器、横摆角速度传感器、前轮转角传感器、危险工况判断模块、路面附着系数估计模块、避撞控制模块、转向执行机构、制动执行机构以及执行控制单元。工作时路面附着系数估计模块首先估计路面附着系数,将其和车速、两车相对距离一起输入危险工况判定模块,判定紧急工况为制动避撞、转向避撞、协调避撞、无法避撞四种工况中的何种类型并分别采用不同避撞控制方法实现主动规避。本发明保证了紧急工况下且路面突变等恶劣情况下的自适应主动避撞,可以更有效的
一种智能汽车换道避撞控制方法.pdf
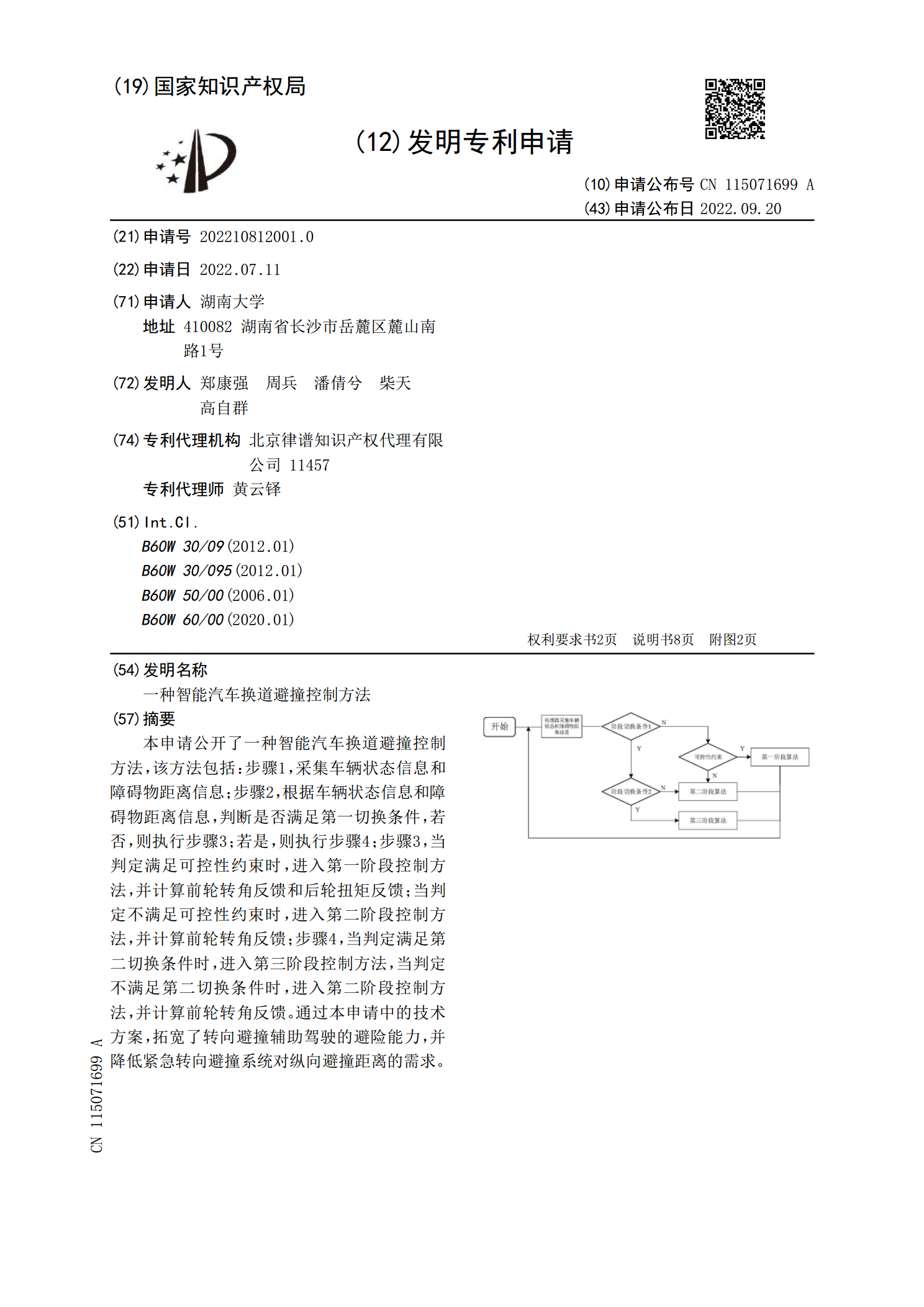
本申请公开了一种智能汽车换道避撞控制方法,该方法包括:步骤1,采集车辆状态信息和障碍物距离信息;步骤2,根据车辆状态信息和障碍物距离信息,判断是否满足第一切换条件,若否,则执行步骤3;若是,则执行步骤4;步骤3,当判定满足可控性约束时,进入第一阶段控制方法,并计算前轮转角反馈和后轮扭矩反馈;当判定不满足可控性约束时,进入第二阶段控制方法,并计算前轮转角反馈;步骤4,当判定满足第二切换条件时,进入第三阶段控制方法,当判定不满足第二切换条件时,进入第二阶段控制方法,并计算前轮转角反馈。通过本申请中的技术方案,
一种适用于冰雪道路工况的转向制动联合避撞控制方法.pdf
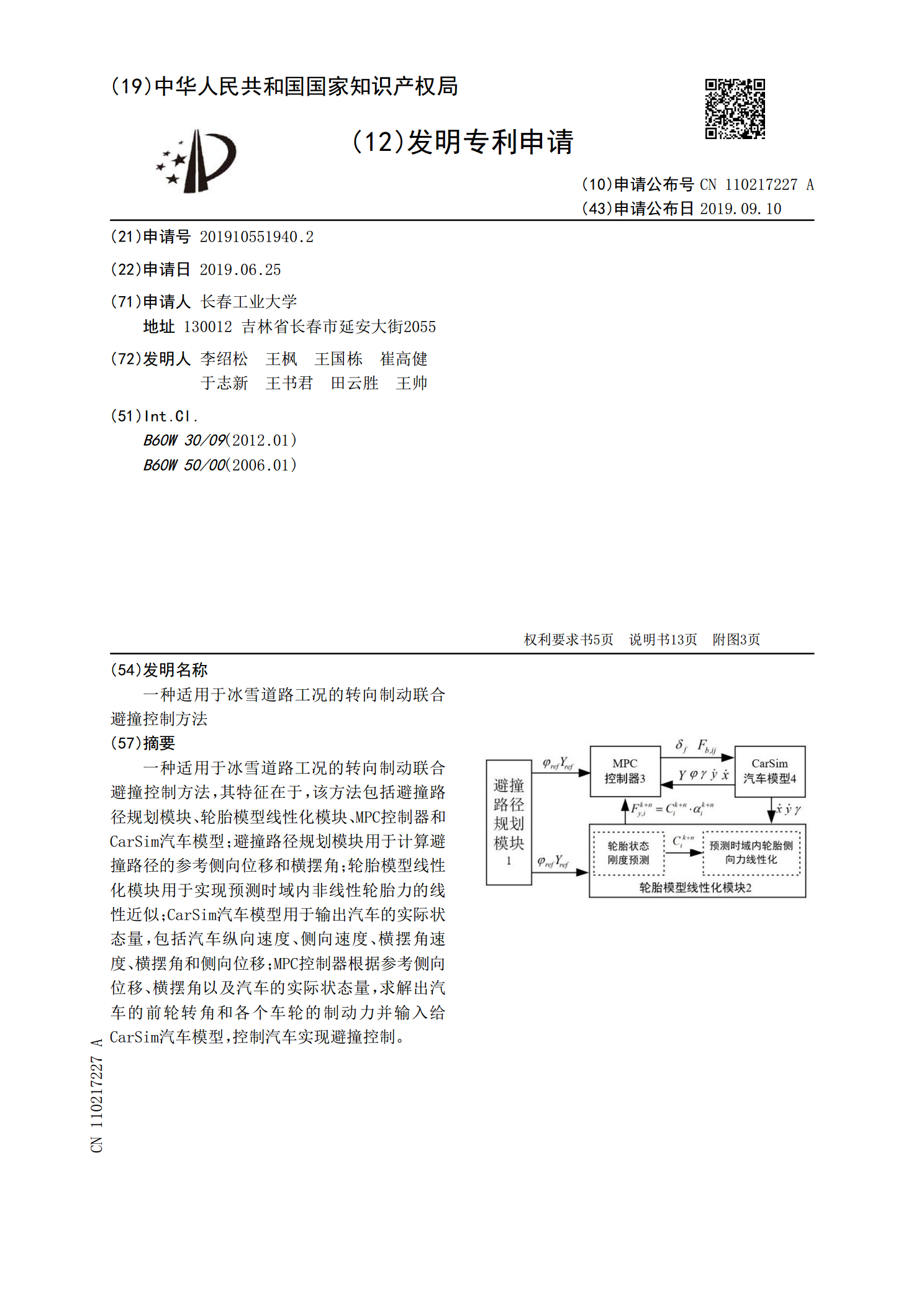
一种适用于冰雪道路工况的转向制动联合避撞控制方法,其特征在于,该方法包括避撞路径规划模块、轮胎模型线性化模块、MPC控制器和CarSim汽车模型;避撞路径规划模块用于计算避撞路径的参考侧向位移和横摆角;轮胎模型线性化模块用于实现预测时域内非线性轮胎力的线性近似;CarSim汽车模型用于输出汽车的实际状态量,包括汽车纵向速度、侧向速度、横摆角速度、横摆角和侧向位移;MPC控制器根据参考侧向位移、横摆角以及汽车的实际状态量,求解出汽车的前轮转角和各个车轮的制动力并输入给CarSim汽车模型,控制汽车实现避撞控

基于模糊PID算法的整车避撞控制多工况仿真.pptx
汇报人:目录PARTONEPARTTWO模糊逻辑系统PID控制算法模糊PID算法的结合PARTTHREE系统架构传感器配置控制策略仿真模型建立PARTFOUR城市道路工况高速公路工况山区道路工况雨雪天气工况PARTFIVE不同工况下的避撞效果控制参数优化算法性能评估优缺点分析PARTSIX结论总结未来研究方向THANKYOU

基于场论的汽车避撞方法研究.pptx
基于场论的汽车避撞方法研究目录研究背景汽车避撞技术的必要性现有避撞技术的局限性基于场论的汽车避撞方法的提出场论的基本原理场论的基本概念车辆周围场的影响因素场论在汽车避撞中的应用基于场论的汽车避撞方法基于场论的避撞算法设计算法实现与验证与传统避撞方法的比较分析避撞方法的性能评估评估指标的确定评估实验的设计与实施实验结果分析实际应用与展望基于场论的汽车避撞方法在实际中的应用未来研究方向与展望结论研究成果总结对未来研究的建议感谢观看