
一种适用于冰雪道路工况的转向制动联合避撞控制方法.pdf

含秀****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于冰雪道路工况的转向制动联合避撞控制方法.pdf
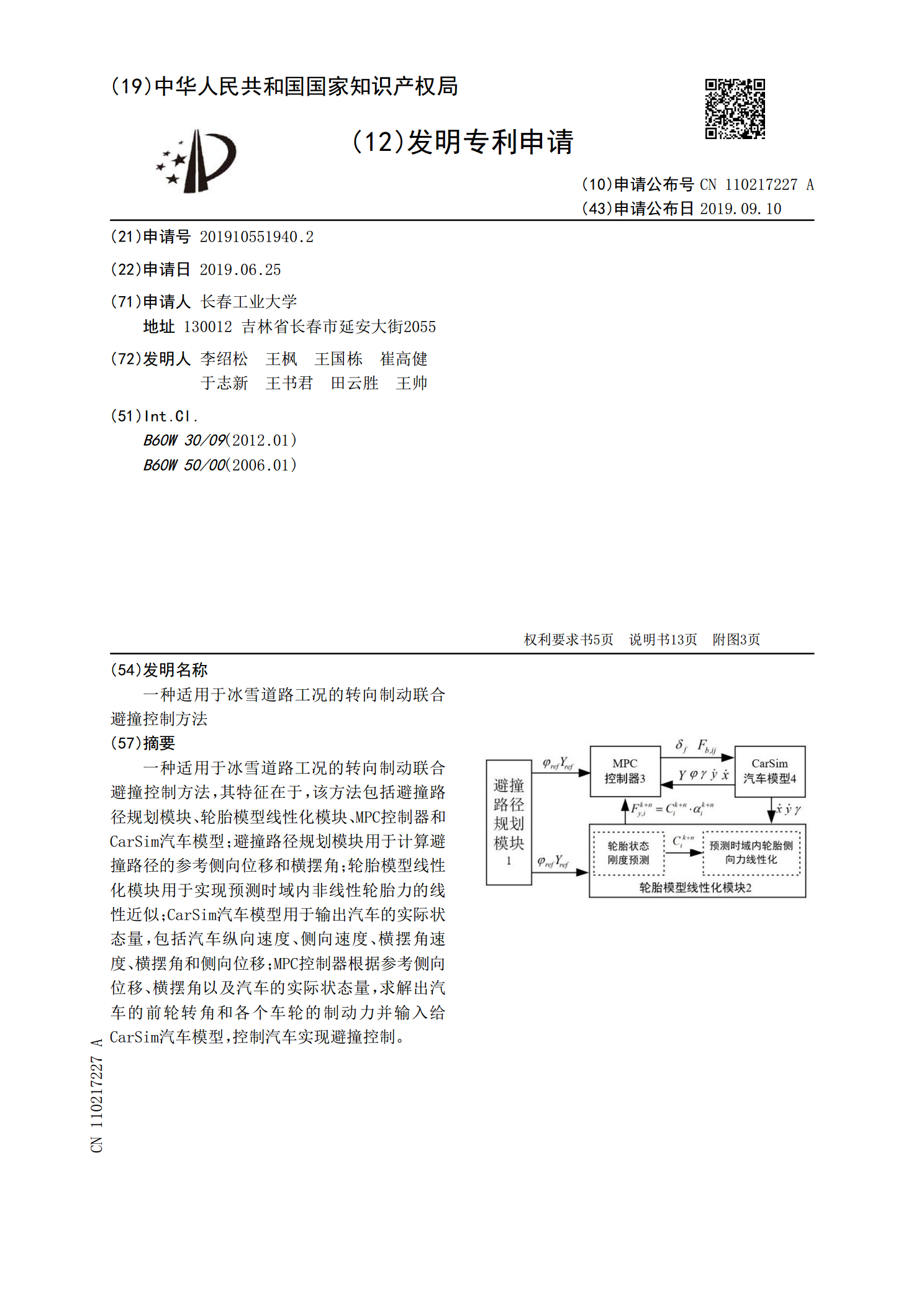
一种适用于冰雪道路工况的转向制动联合避撞控制方法,其特征在于,该方法包括避撞路径规划模块、轮胎模型线性化模块、MPC控制器和CarSim汽车模型;避撞路径规划模块用于计算避撞路径的参考侧向位移和横摆角;轮胎模型线性化模块用于实现预测时域内非线性轮胎力的线性近似;CarSim汽车模型用于输出汽车的实际状态量,包括汽车纵向速度、侧向速度、横摆角速度、横摆角和侧向位移;MPC控制器根据参考侧向位移、横摆角以及汽车的实际状态量,求解出汽车的前轮转角和各个车轮的制动力并输入给CarSim汽车模型,控制汽车实现避撞控

制动与转向协调动作的车辆避撞控制研究.docx
制动与转向协调动作的车辆避撞控制研究摘要车辆避撞控制一直是汽车安全领域的热点研究。本文主要探讨制动与转向协调动作在车辆避撞控制中的应用。首先介绍了制动和转向的基本原理和控制方法,然后讨论了制动与转向协调动作的实现方法以及对车辆避撞控制的影响。最后通过仿真实验验证了制动与转向协调动作在车辆避撞控制中的有效性。关键词:车辆避撞控制,制动,转向,协调动作,仿真实验1.引言随着车辆数量的增加,交通安全问题日益引起人们的关注。车辆避撞控制是提高交通安全性能的关键技术之一。目前,针对车辆避撞控制的研究主要集中在制动控

一种车辆紧急转向避撞时ESP与EPS联合控制方法.pdf
本发明公开了一种车辆紧急转向避撞时ESP与EPS联合控制方法,包括:1利用轮速传感器获得纵向车速v

基于功能分配与多目标模糊决策的转向与制动协同避撞控制.docx
基于功能分配与多目标模糊决策的转向与制动协同避撞控制转向与制动协同避撞控制是汽车安全控制的一个重要研究方向。如何通过合理地分配车辆转向和制动功能,并采用多目标模糊决策方法,实现车辆避撞的高效、准确控制,对于提高汽车行驶安全性具有重要的意义。一、分析车辆转向与制动对避撞控制的影响车辆的转向与制动是影响其行驶安全的两个重要参数。转向可以影响车辆的行驶方向和车辆的速度,而制动可以控制车辆的速度和停车距离。在避撞控制方面,转向和制动可以通过协同作用来实现避撞。比如,在高速公路上遇到突然的交通堵塞或紧急情况时,通过
一种汽车危险工况的界定与避撞控制方法.pdf
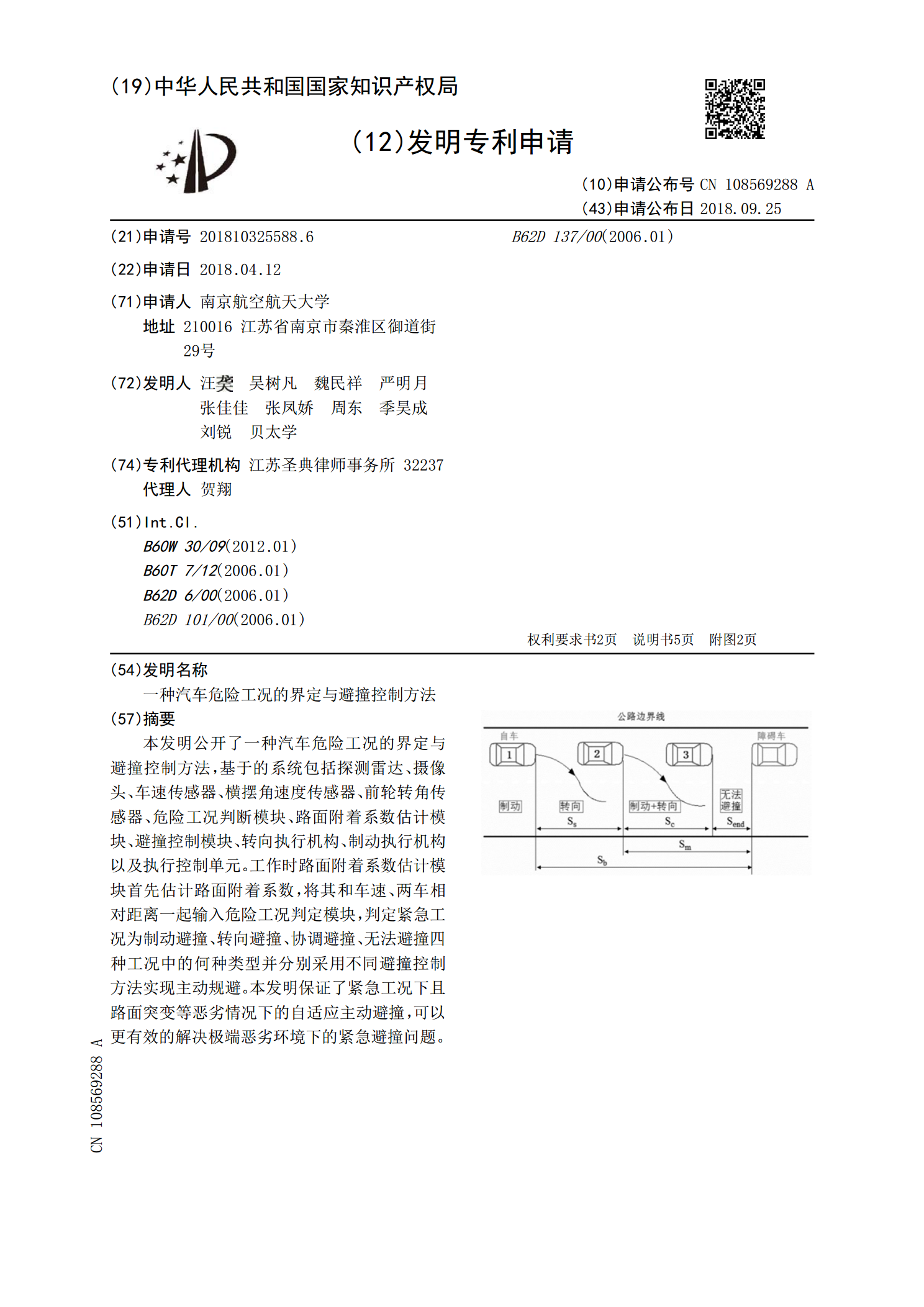
本发明公开了一种汽车危险工况的界定与避撞控制方法,基于的系统包括探测雷达、摄像头、车速传感器、横摆角速度传感器、前轮转角传感器、危险工况判断模块、路面附着系数估计模块、避撞控制模块、转向执行机构、制动执行机构以及执行控制单元。工作时路面附着系数估计模块首先估计路面附着系数,将其和车速、两车相对距离一起输入危险工况判定模块,判定紧急工况为制动避撞、转向避撞、协调避撞、无法避撞四种工况中的何种类型并分别采用不同避撞控制方法实现主动规避。本发明保证了紧急工况下且路面突变等恶劣情况下的自适应主动避撞,可以更有效的