
一种充电桩自动识别方法及装置.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种充电桩自动识别方法及装置.pdf
本发明公开了一种充电桩自动识别方法,包括:扫描周边环境,获取周边环境中各物体的轮廓信息;根据预存的充电桩的轮廓信息,从各物体的轮廓信息中选取出备选轮廓;根据预存的充电桩轮廓信息中的特征因素,为各备选轮廓进行综合评分;按照综合评分从高到低的顺序,依次移动至对应备选轮廓前进行进一步评分确认直至找到充电桩。此外,本发明还公开了一种充电桩自动识别装置,包括:轮廓扫描模块、存储模块、轮廓选取模块,评分识别模块、及移动确认模块。通过本发明可实现快速而准确地自动识别充电桩,以便完成自动充电;且本发明的方案降低了成本,识
充电桩的自动充电处理方法及其装置.pdf
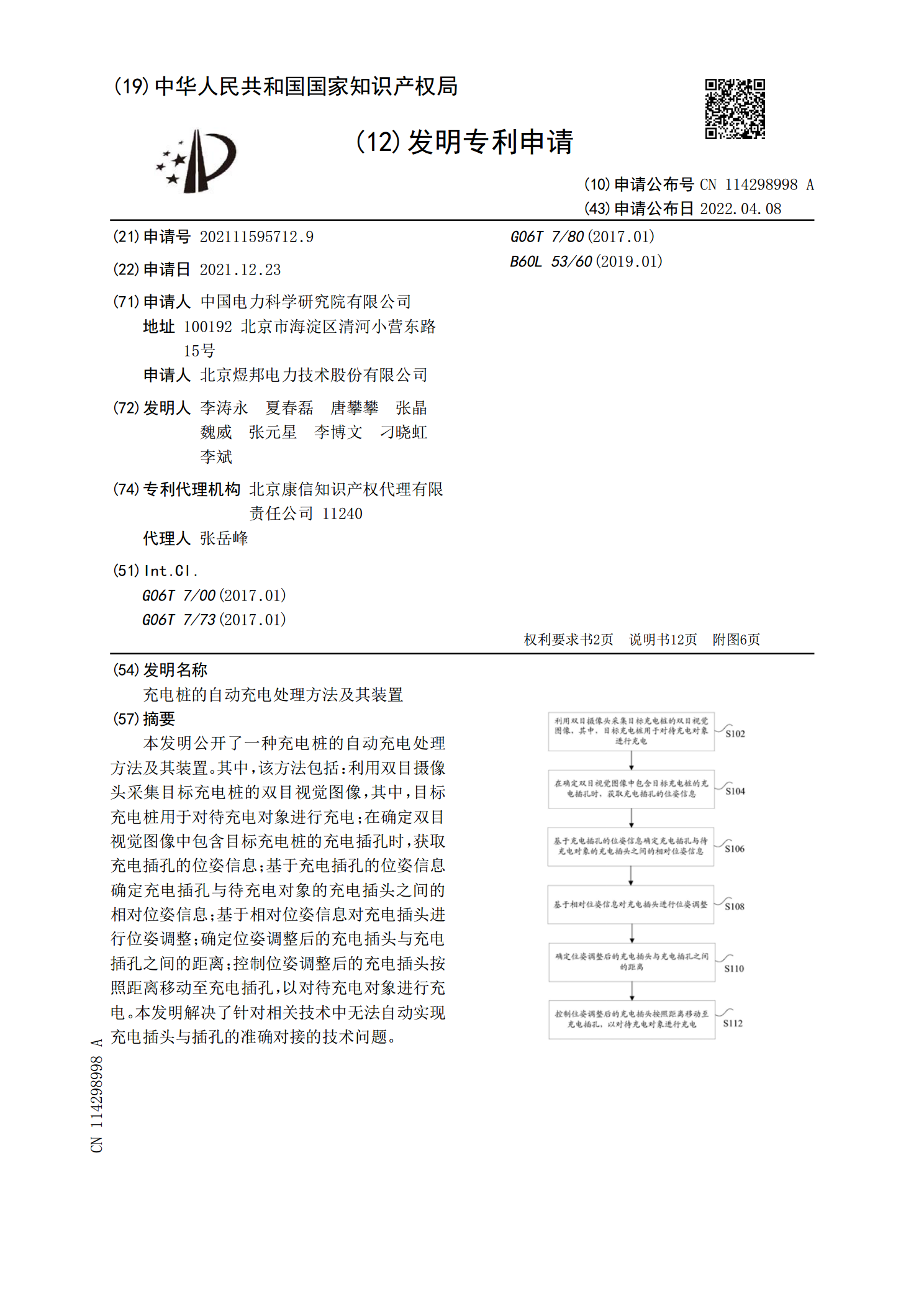
本发明公开了一种充电桩的自动充电处理方法及其装置。其中,该方法包括:利用双目摄像头采集目标充电桩的双目视觉图像,其中,目标充电桩用于对待充电对象进行充电;在确定双目视觉图像中包含目标充电桩的充电插孔时,获取充电插孔的位姿信息;基于充电插孔的位姿信息确定充电插孔与待充电对象的充电插头之间的相对位姿信息;基于相对位姿信息对充电插头进行位姿调整;确定位姿调整后的充电插头与充电插孔之间的距离;控制位姿调整后的充电插头按照距离移动至充电插孔,以对待充电对象进行充电。本发明解决了针对相关技术中无法自动实现充电插头与插
一种充电桩用自动收线装置.pdf
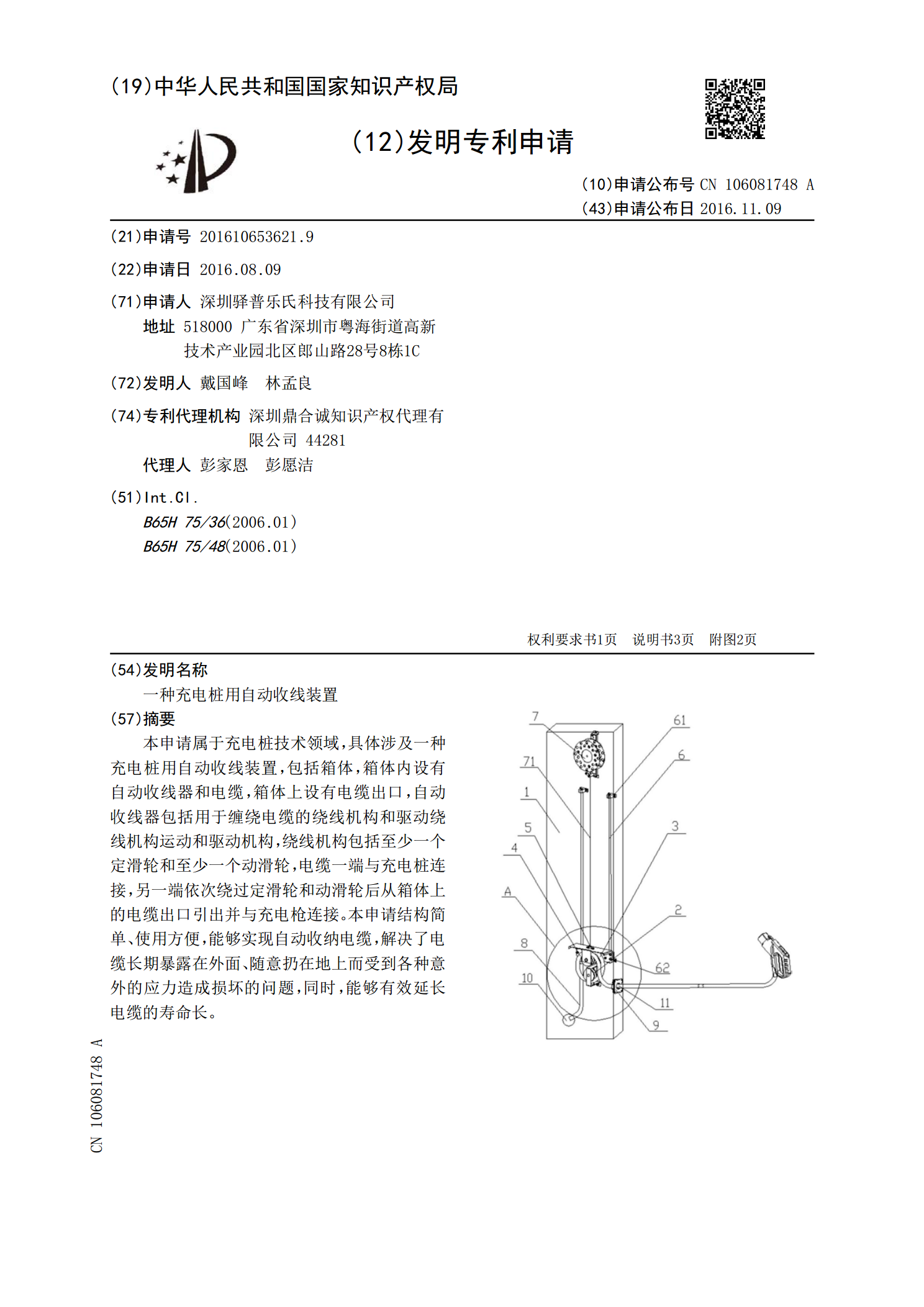
本申请属于充电桩技术领域,具体涉及一种充电桩用自动收线装置,包括箱体,箱体内设有自动收线器和电缆,箱体上设有电缆出口,自动收线器包括用于缠绕电缆的绕线机构和驱动绕线机构运动和驱动机构,绕线机构包括至少一个定滑轮和至少一个动滑轮,电缆一端与充电桩连接,另一端依次绕过定滑轮和动滑轮后从箱体上的电缆出口引出并与充电枪连接。本申请结构简单、使用方便,能够实现自动收纳电缆,解决了电缆长期暴露在外面、随意扔在地上而受到各种意外的应力造成损坏的问题,同时,能够有效延长电缆的寿命长。

一种充电桩自动升降收线装置.pdf
本发明公开了一种充电桩自动升降收线装置,包括:自动升降杆、载板、活动导轨及充电线缆,通过设计带有自动升降杆结构的收线装置,使充电桩等电力设备可以悬空安置,避免电力设备遭受暴雨水浸等自然灾害破坏,该装置通过自动升降杆、活动轨道与支撑杆三者协调运作,实现了充电线缆的自动升降联动收放,提高充电桩充电的覆盖范围同时避免线缆磨损,悬空的充电线缆提高了散热能力,解决充电线缆中环绕充电线缆的发热问题,加载了监控器和具有防拔机构的活动充电枪,进一步提高了电动汽车充电安全性。

一种新能源充电桩充电线缆自动回收装置.pdf
本发明涉及一种自动回收装置,尤其涉及一种新能源充电桩充电线缆自动回收装置。主要是提供一种实现自动收卷,且带动线缆均匀缠绕,防止充电线缆堆积,便于使用的新能源充电桩充电线缆自动回收装置。一种新能源充电桩充电线缆自动回收装置,包括有:充电桩本体、空心筒、底盘、转杆、充电头和充电线缆,充电桩本体底部设有空心筒,空心筒底部固定连接有底盘,底盘中心转动式设有与充电桩本体转动连接的转杆,转杆下部连接有充电线缆,充电线缆另一端连接有充电头,充电头插入充电桩本体。减速电机的输出轴转动通过转轴、轴套、齿轮、齿圈和底盘带动转