
基于虚拟仪器的气体射流冲击装置自动控制研究.pdf

sy****28


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于虚拟仪器的气体射流冲击装置自动控制研究.pdf
http://www.paper.edu.cn基于虚拟仪器的气体射流冲击装置自动控制研究向名1,高振江11中国农业大学工学院,(100083)E-mail:xm1210_1983@163.com摘要:本文系统地介绍了气体射流冲击的概念及其优点、虚拟仪器的有关概念和LabWindows/CVI语言,并利用LabWindow/CVI开发平台研制了基于气体射流冲击装置的自动控制系统。试验过程中运用PID来控制温度的变化。最后,通过试验验证,该系统控制精度高,且运行稳定。关键词:虚拟仪器LabWindows/CV
一种基于旋转机构和直线机构的气体冲击射流测压装置.pdf
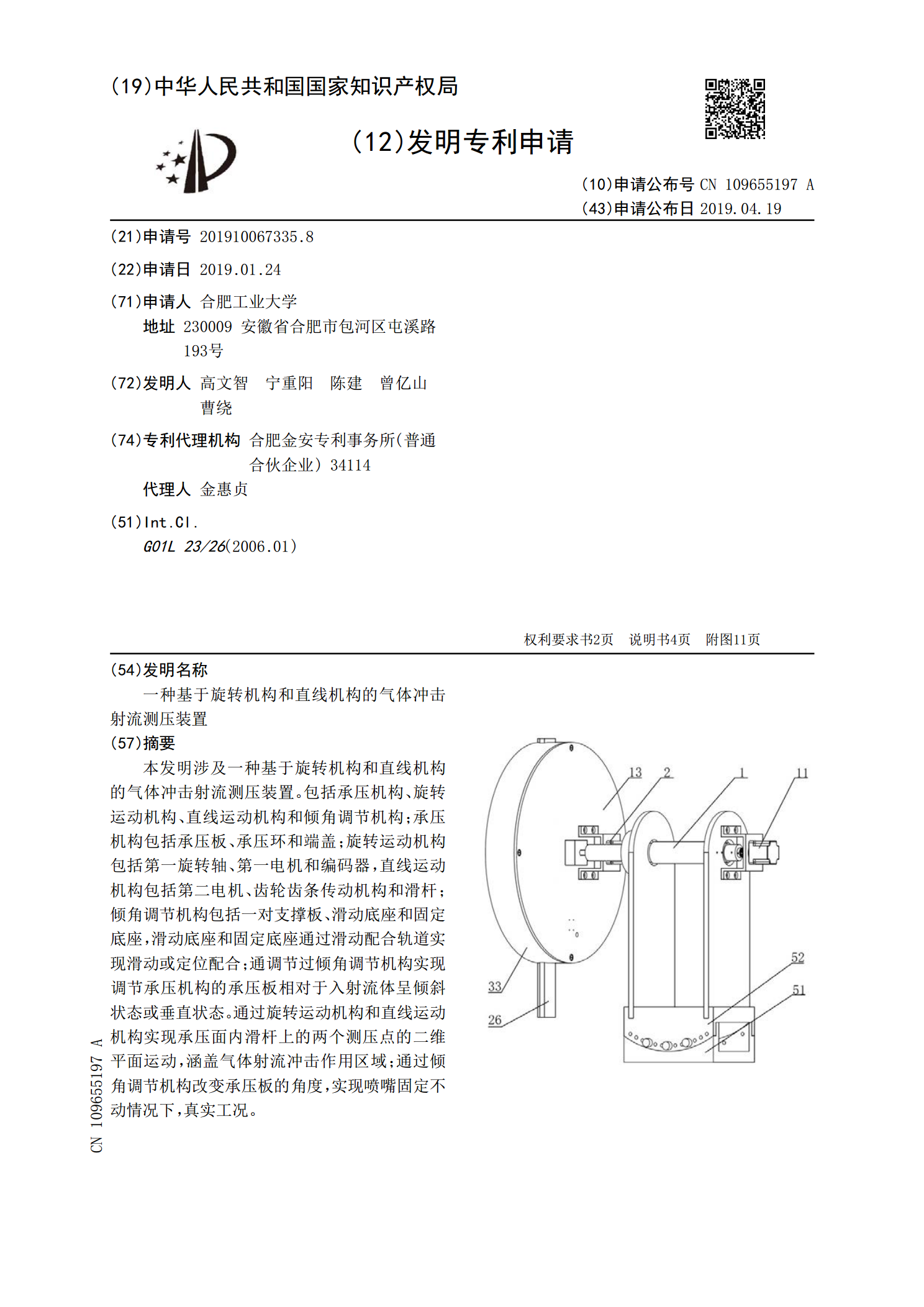
本发明涉及一种基于旋转机构和直线机构的气体冲击射流测压装置。包括承压机构、旋转运动机构、直线运动机构和倾角调节机构;承压机构包括承压板、承压环和端盖;旋转运动机构包括第一旋转轴、第一电机和编码器,直线运动机构包括第二电机、齿轮齿条传动机构和滑杆;倾角调节机构包括一对支撑板、滑动底座和固定底座,滑动底座和固定底座通过滑动配合轨道实现滑动或定位配合;通调节过倾角调节机构实现调节承压机构的承压板相对于入射流体呈倾斜状态或垂直状态。通过旋转运动机构和直线运动机构实现承压面内滑杆上的两个测压点的二维平面运动,涵盖气

气体射流冲击高温钢板的瞬态换热实验研究.docx
气体射流冲击高温钢板的瞬态换热实验研究摘要:本文通过实验研究,探讨了气体射流冲击高温钢板时的瞬态换热特性。实验采用了热风射流作为冲击介质,对不同温度和流速的射流进行了测试。通过分析实验数据,得出了射流冲击高温钢板的换热过程,包括射流与钢板之间的传热机制、传热系数的计算和影响因素等。研究结果对提高高温钢板的冷却效率和应用于工程实践具有重要意义。关键词:气体射流;高温钢板;换热特性;传热机制;传热系数1.引言高温钢板的冷却过程对于钢板的温度控制和材料性能的稳定至关重要。气体射流冲击作为一种常用的冷却方法,由于

一种基于间歇式螺旋运动机构的气体冲击射流测压装置.pdf
本发明涉及一种基于间歇式螺旋运动机构的气体冲击射流测压装置。包括壳体以及设置在壳体顶部的承压板,所述的壳体与承压板之间形成一个中空的密闭腔体,所述的承压板自中心点开始向外侧设有螺旋式排布的气孔,所述的密闭腔体内设有电机、间歇调节装置、旋转调节装置、直线调节装置以及气体压强传感器,所述电机的输出轴上固定有驱动齿轮。由上述技术方案可知,本发明通过间歇调节装置、旋转调节装置、直线调节装置实现气体压强传感器沿螺纹杆上的螺旋线间歇移动,可以仅用一个电机在承压板固定不移动的情况下,通过气体压强传感器实现对不同的喷嘴与
气体射流冲击干燥无核紫葡萄中试工艺研究.pptx
添加副标题目录PART01PART02气体射流冲击干燥定义气体射流冲击干燥工作原理气体射流冲击干燥特点PART03无核紫葡萄的品种特性无核紫葡萄的营养价值无核紫葡萄的用途PART04原料选择与处理气体射流冲击干燥设备选择与参数设置干燥过程监控与数据记录产品质量检测与评估PART05干燥温度对无核紫葡萄的影响气体流速对无核紫葡萄的影响物料厚度对无核紫葡萄的影响干燥时间对无核紫葡萄的影响PART06干燥后无核紫葡萄的品质变化与传统干燥方法的比较中试工艺的经济效益分析中试工艺的社会效益分析PART07中试工艺的