
一种可爬楼梯的全地形智能轮椅.pdf

梅雪****67


1/8
2/8
3/8
4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可爬楼梯的全地形智能轮椅.pdf
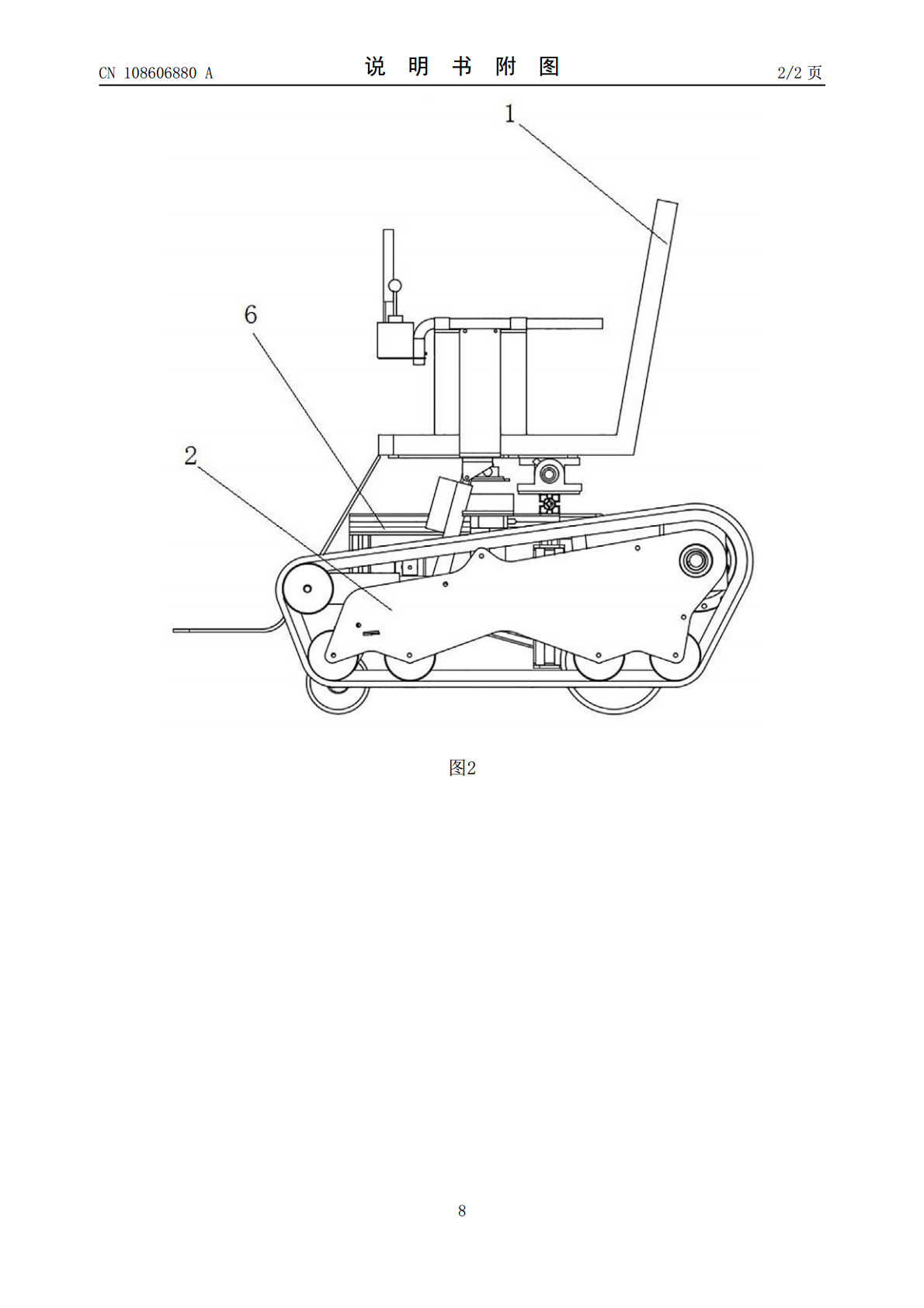
本发明涉及机械领域,具体涉及轮椅。一种可爬楼梯的全地形智能轮椅,包括一智能轮椅,智能轮椅包括一驱动车轮的驱动系统,智能轮椅包括一轮椅架,轮椅架的下部安有一履带式底盘,履带式底盘包括两条履带;轮椅架的下部安有一升降装置,升降装置上固定有四个车轮,四个车轮设置在两条履带之间。本发明通过优化原有的智能轮椅结构,增设履带式底盘使轮椅不仅能在大部分地形上行驶同时可攀爬楼梯;在平坦路面行驶时,通过车轮保持正常行驶,当遇到楼梯、崎岖路面等环境时,利用升降装置收起车轮,采用履带带动,保证行驶过程的平稳,进而用户使用轮椅时
一种可爬楼梯轮椅用轮胎.pdf
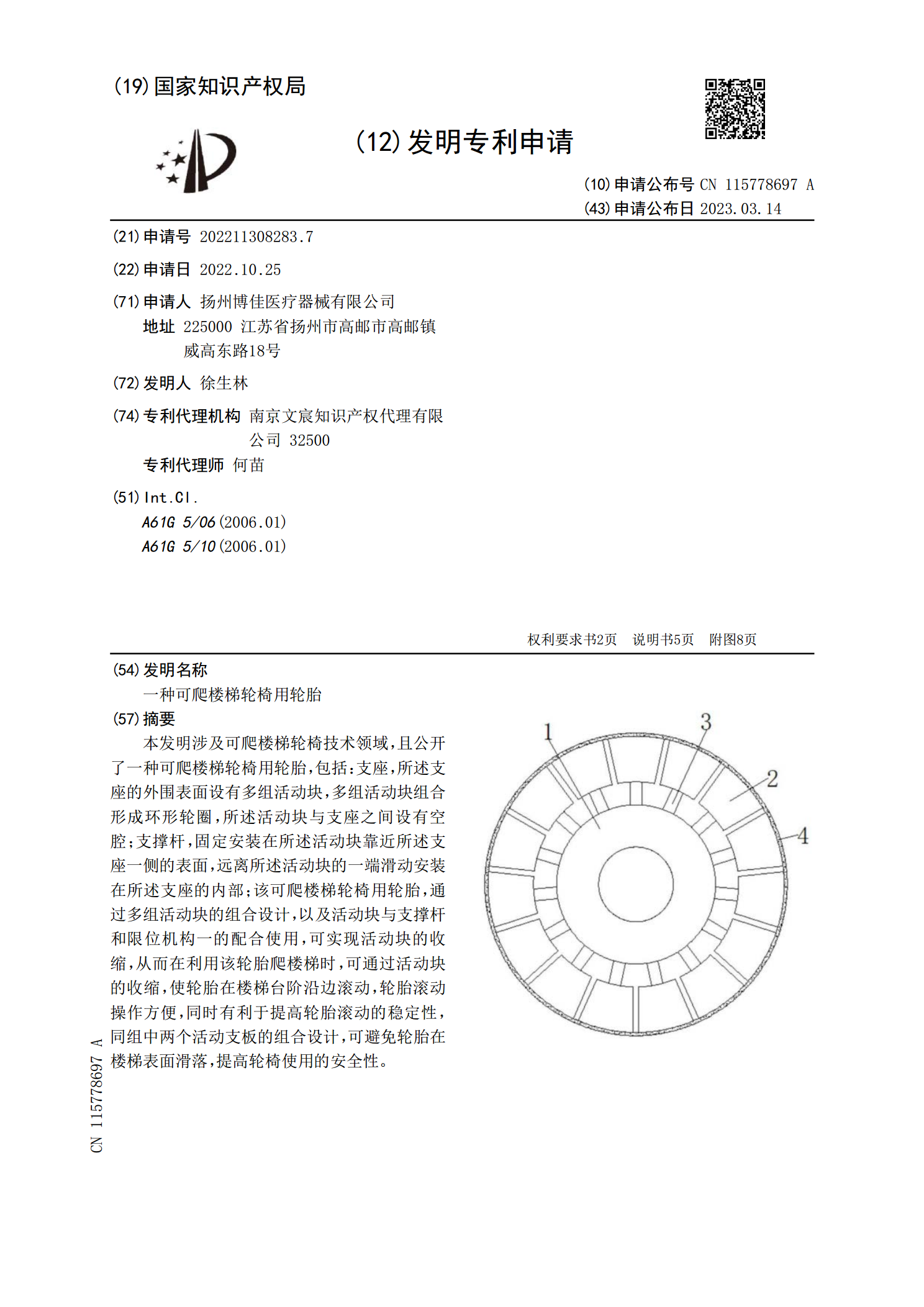
本发明涉及可爬楼梯轮椅技术领域,且公开了一种可爬楼梯轮椅用轮胎,包括:支座,所述支座的外围表面设有多组活动块,多组活动块组合形成环形轮圈,所述活动块与支座之间设有空腔;支撑杆,固定安装在所述活动块靠近所述支座一侧的表面,远离所述活动块的一端滑动安装在所述支座的内部;该可爬楼梯轮椅用轮胎,通过多组活动块的组合设计,以及活动块与支撑杆和限位机构一的配合使用,可实现活动块的收缩,从而在利用该轮胎爬楼梯时,可通过活动块的收缩,使轮胎在楼梯台阶沿边滚动,轮胎滚动操作方便,同时有利于提高轮胎滚动的稳定性,同组中两个活

一种可爬楼梯的多功能轮椅.pdf
一种可爬楼梯的多功能轮椅,由椅架、笔记本托盘、靠背调节手臂、靠背、可伸缩小轮支架、小轮、小轮步进电机、大轮、GPS导航及轮椅控制模块、踏板、大轮步进电机、旋转臂步进电机、电池盒、旋转手臂组成,其特征为:笔记本托盘和GPS导航及轮椅控制模块安装于椅架两侧,靠背调节手臂连接于靠背与椅架,可伸缩小轮支架通过铰接安装于椅架,小轮与小轮电机安装于可伸缩小轮支架,大轮和大轮步进电机安装于椅架,踏板安装于椅架下部,旋转臂步进电机和电池盒安装在椅架底部,旋转手臂连接在旋转臂步进电机和可伸缩小轮支架间。该发明的有益之处是实
一种基于履带和升降结构的多功能可爬楼梯轮椅.pdf
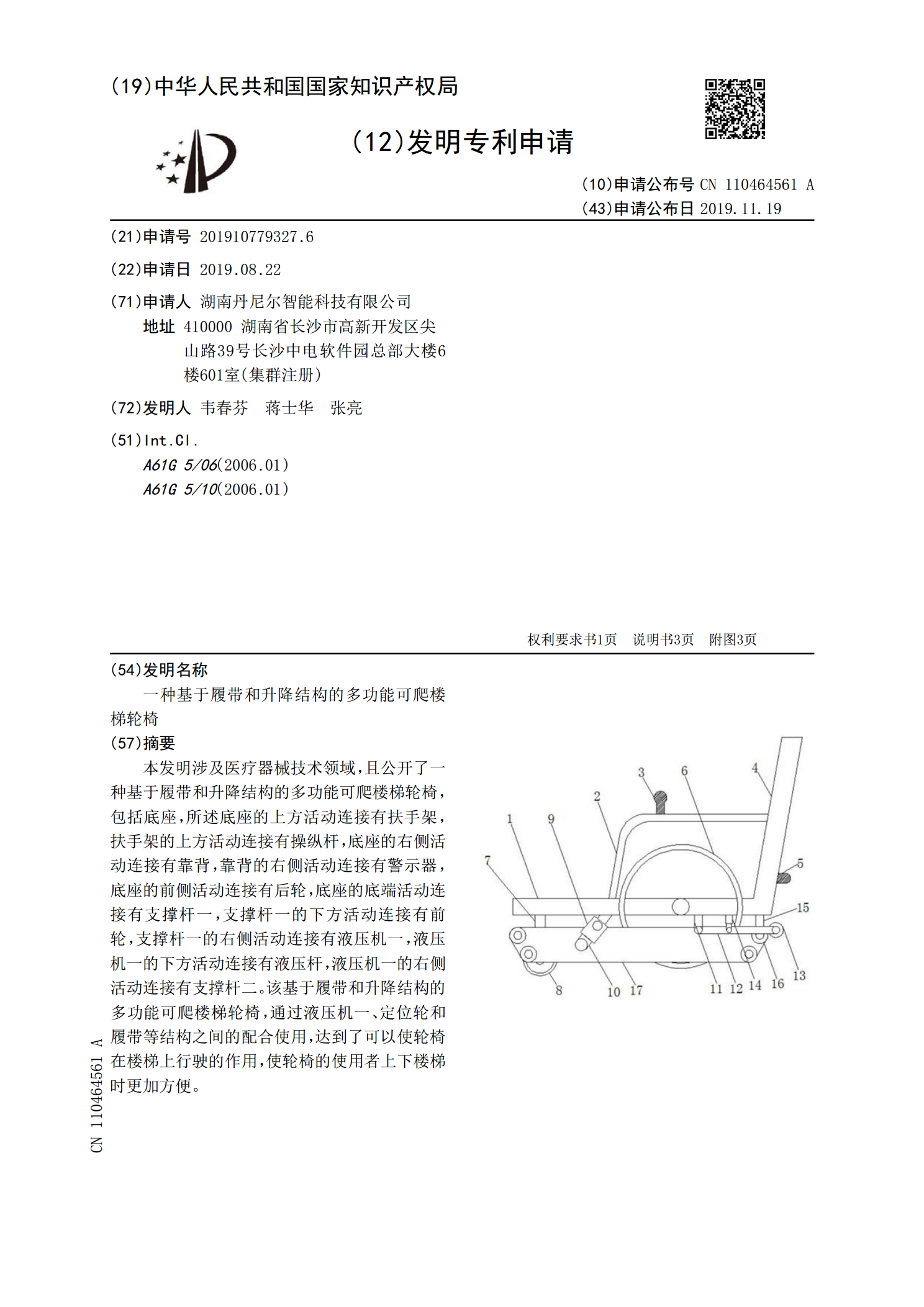
本发明涉及医疗器械技术领域,且公开了一种基于履带和升降结构的多功能可爬楼梯轮椅,包括底座,所述底座的上方活动连接有扶手架,扶手架的上方活动连接有操纵杆,底座的右侧活动连接有靠背,靠背的右侧活动连接有警示器,底座的前侧活动连接有后轮,底座的底端活动连接有支撑杆一,支撑杆一的下方活动连接有前轮,支撑杆一的右侧活动连接有液压机一,液压机一的下方活动连接有液压杆,液压机一的右侧活动连接有支撑杆二。该基于履带和升降结构的多功能可爬楼梯轮椅,通过液压机一、定位轮和履带等结构之间的配合使用,达到了可以使轮椅在楼梯上行驶

一种可爬台阶的轮椅.pdf
本发明公开一种可爬台阶的轮椅,该轮椅包括轮椅框架、前支撑轮、后支撑轮、前支撑脚、后支撑脚和轴,其特征在于该轮椅还包括平行四边形机构和棘轮机构;轮椅采用长度可调的平行四边形机构作为爬台阶的工具,而且在平行四边形机构与后支撑轮之间采用可分离式棘轮机构作为动力连接,因而轮椅具有攀爬多种台阶的能力;而且在爬台阶时能保证轮椅的座椅与地面平行,从而提高了使用者的安全系数。