
一种球面运动并联机构.pdf

秀美****甜v


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种球面运动并联机构.pdf
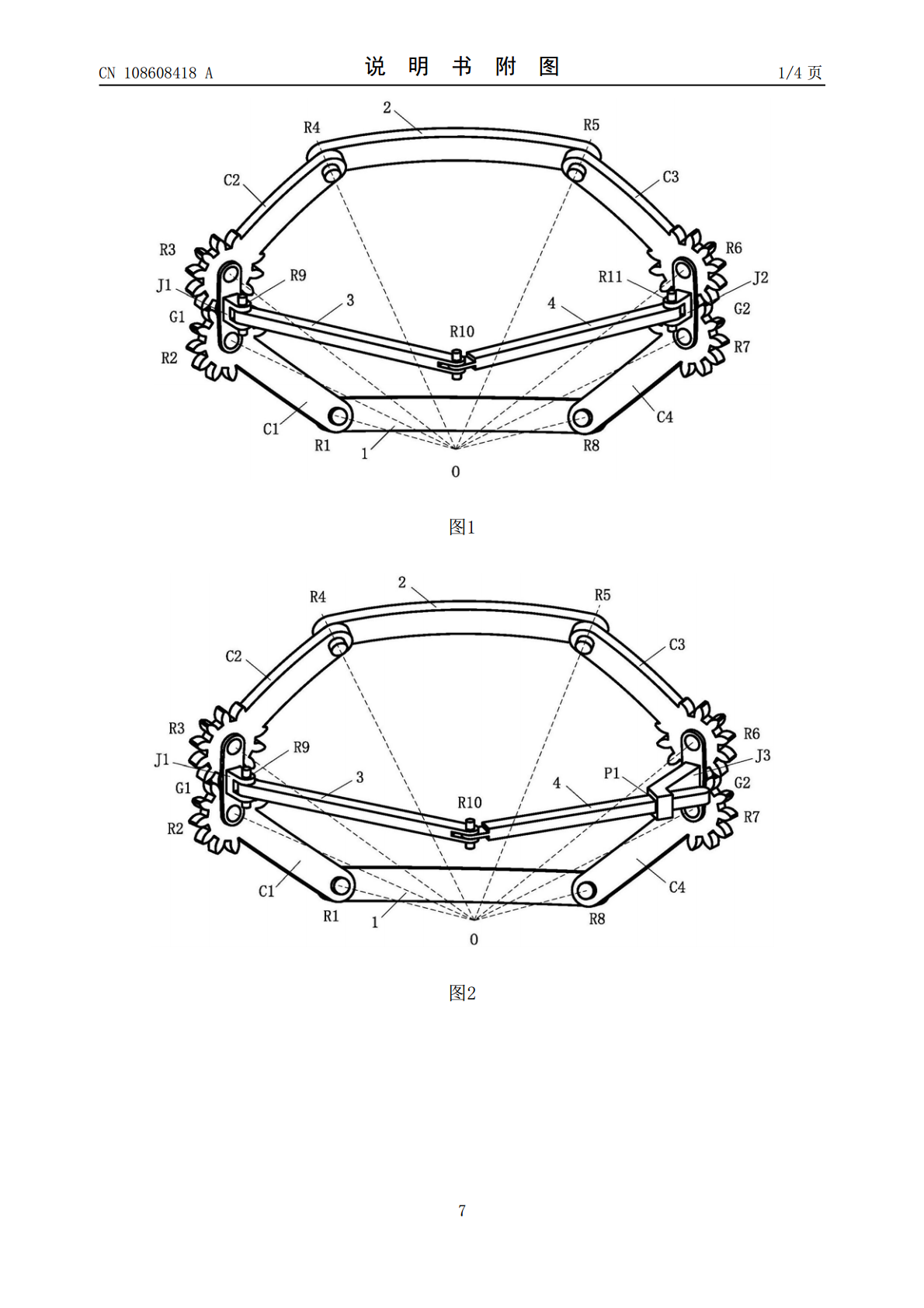
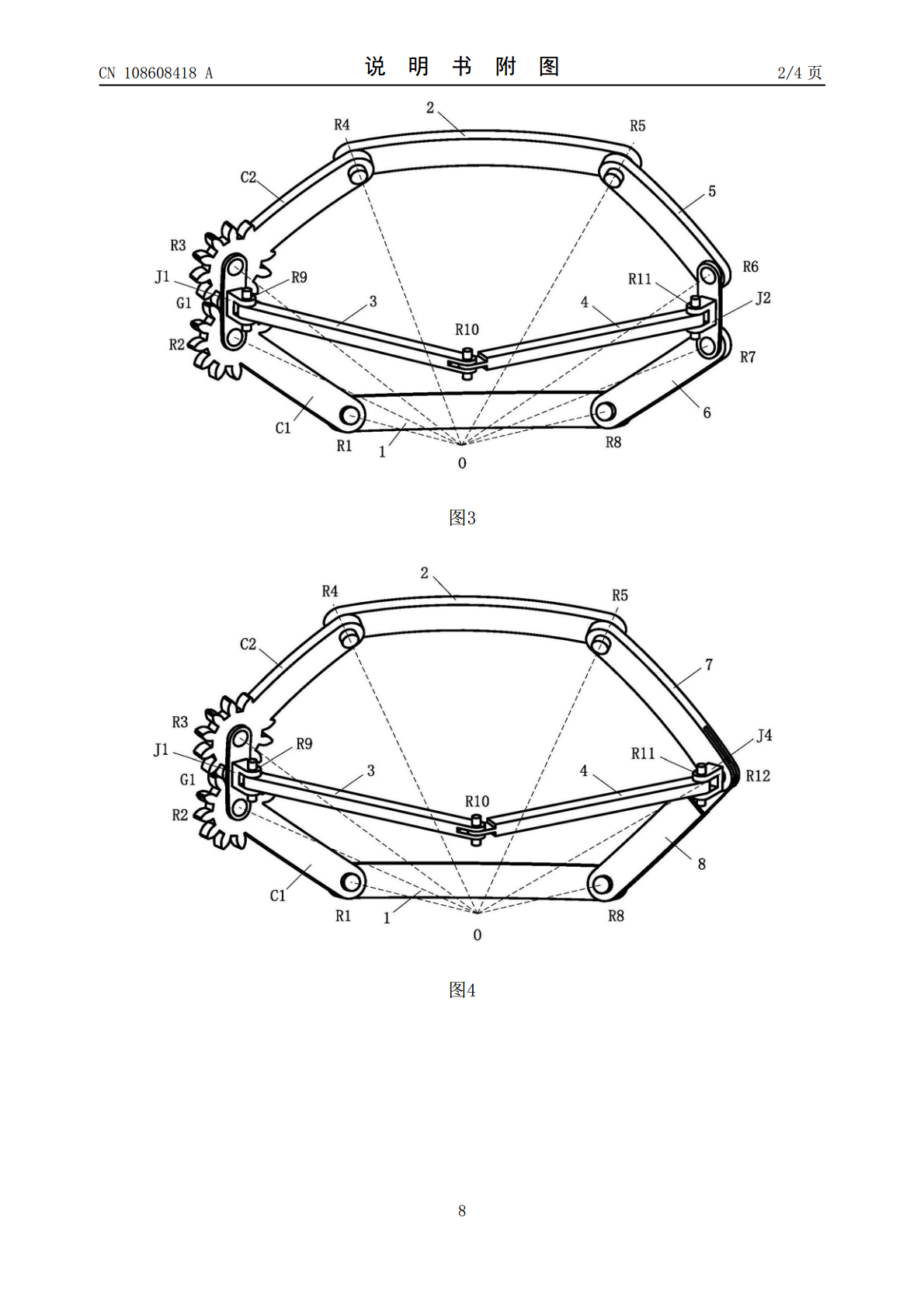
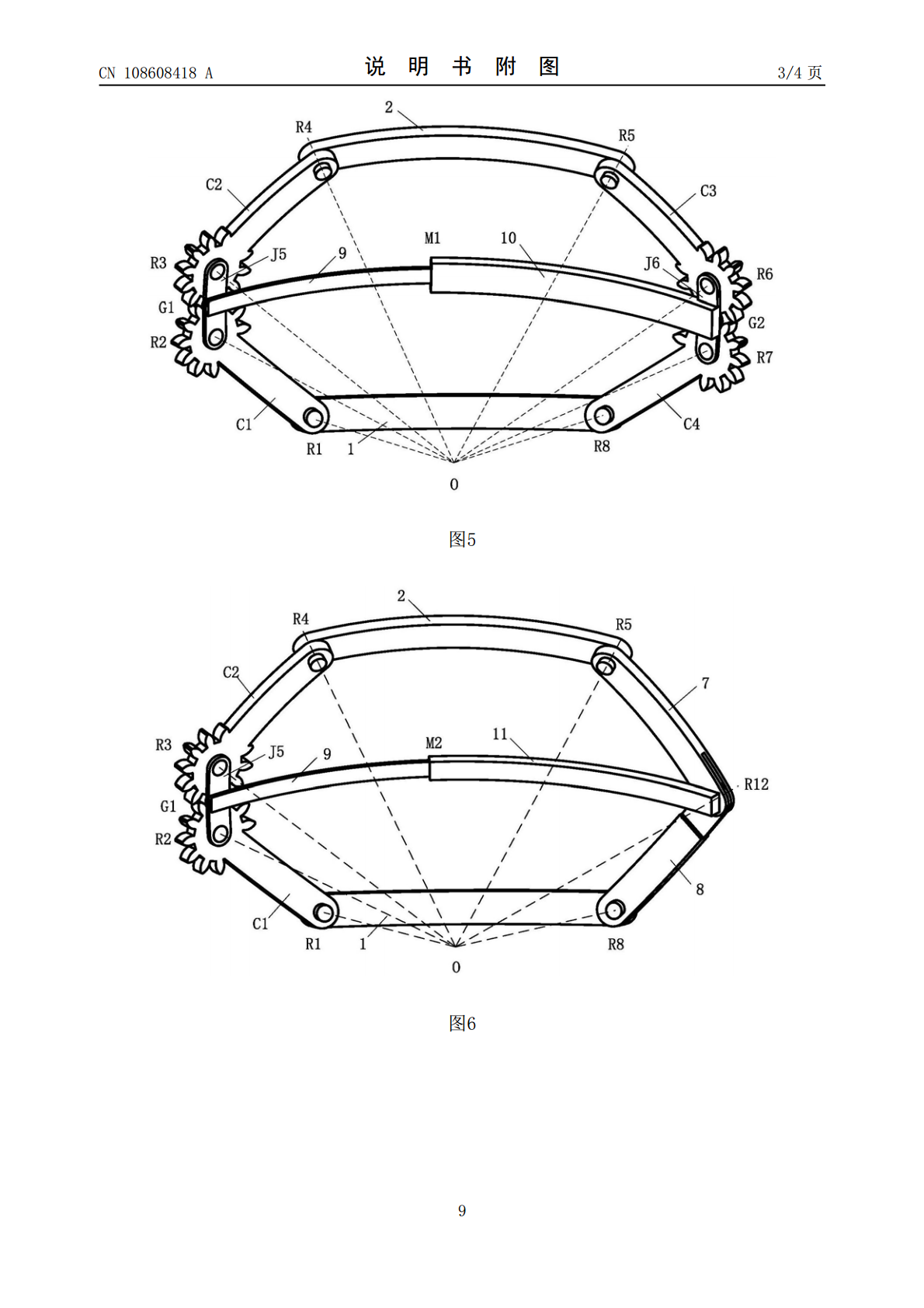
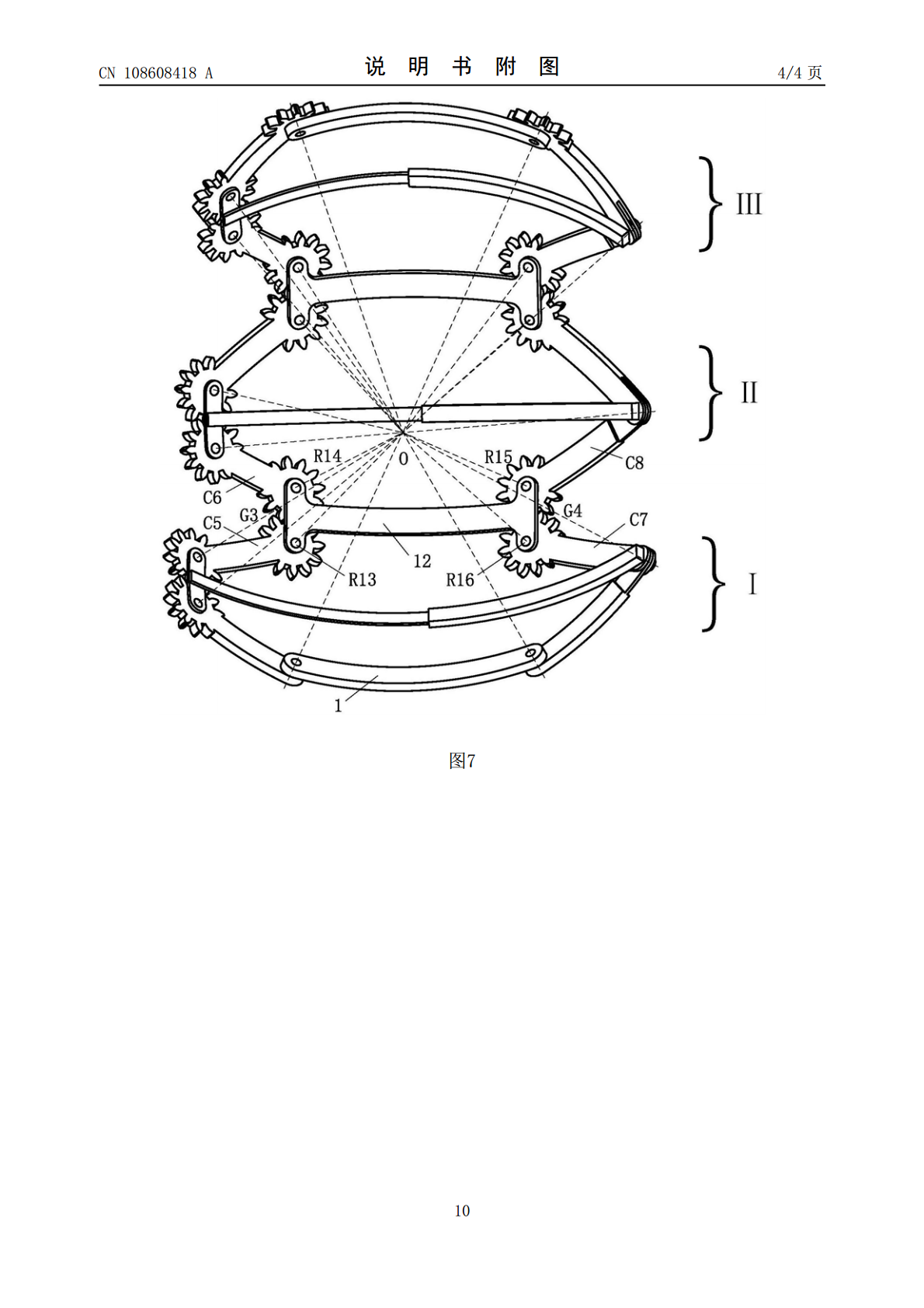
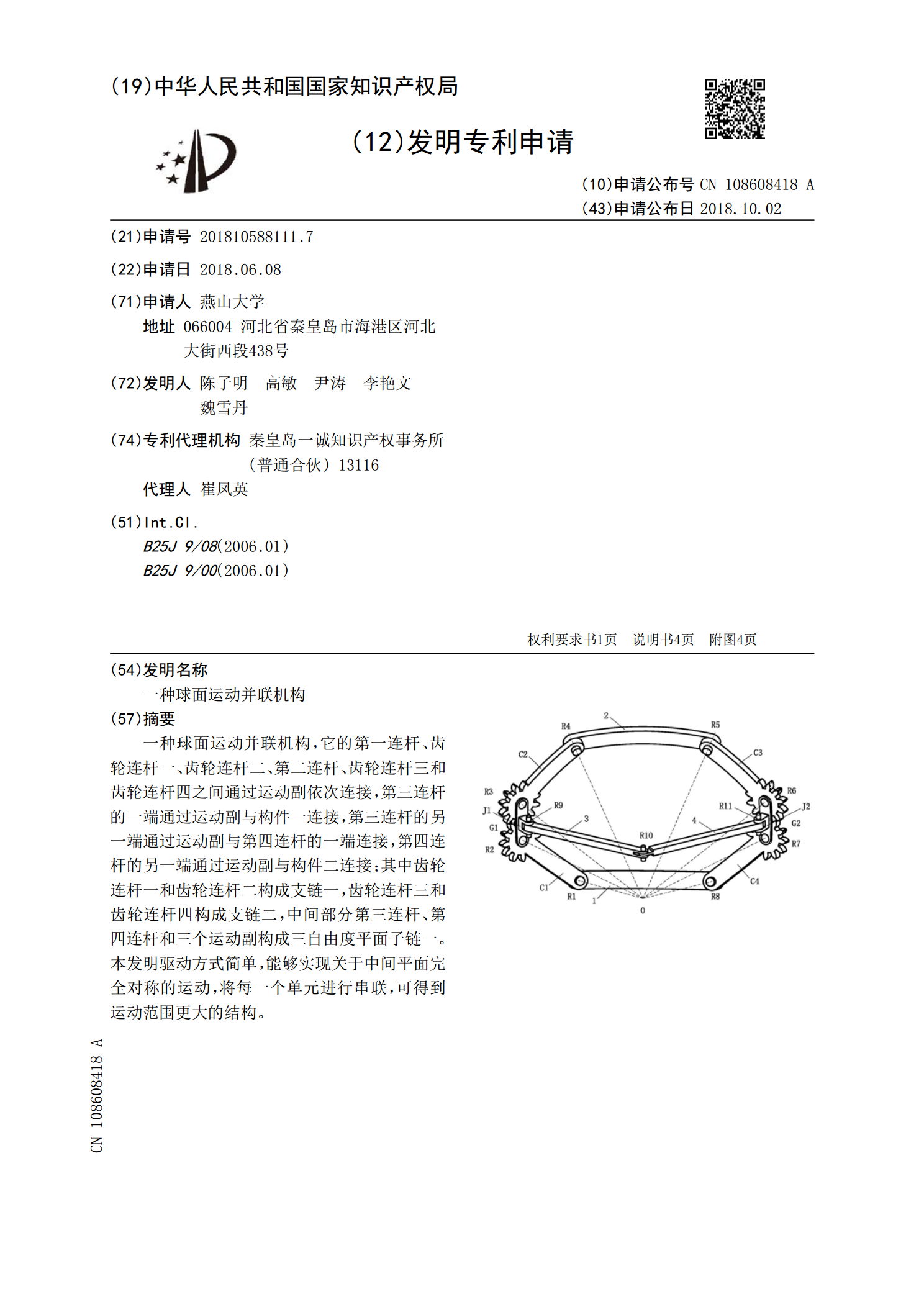
一种球面运动并联机构,它的第一连杆、齿轮连杆一、齿轮连杆二、第二连杆、齿轮连杆三和齿轮连杆四之间通过运动副依次连接,第三连杆的一端通过运动副与构件一连接,第三连杆的另一端通过运动副与第四连杆的一端连接,第四连杆的另一端通过运动副与构件二连接;其中齿轮连杆一和齿轮连杆二构成支链一,齿轮连杆三和齿轮连杆四构成支链二,中间部分第三连杆、第四连杆和三个运动副构成三自由度平面子链一。本发明驱动方式简单,能够实现关于中间平面完全对称的运动,将每一个单元进行串联,可得到运动范围更大的结构。

一种新型球面并联分选机构运动学研究.docx
一种新型球面并联分选机构运动学研究摘要:本文以一种新型球面并联分选机构为研究对象,通过运动学分析,对其运动学特性进行研究。首先介绍了球面并联机构的基本原理和应用领域,然后对该新型机构进行了结构分析和运动模拟,得出了其运动学模型和运动规律。最后通过数值仿真验证了该机构的可行性,并对其性能进行了评估。研究结果表明,该新型球面并联分选机构具有较强的分选能力和灵活性,具有很大的应用潜力。关键词:球面并联机构,运动学分析,结构分析,运动模拟1.引言球面并联机构是一种由多个平行分支组成的并联机构,在机器人学、工业自动
一种轮-腿复合球面并联机构.pdf
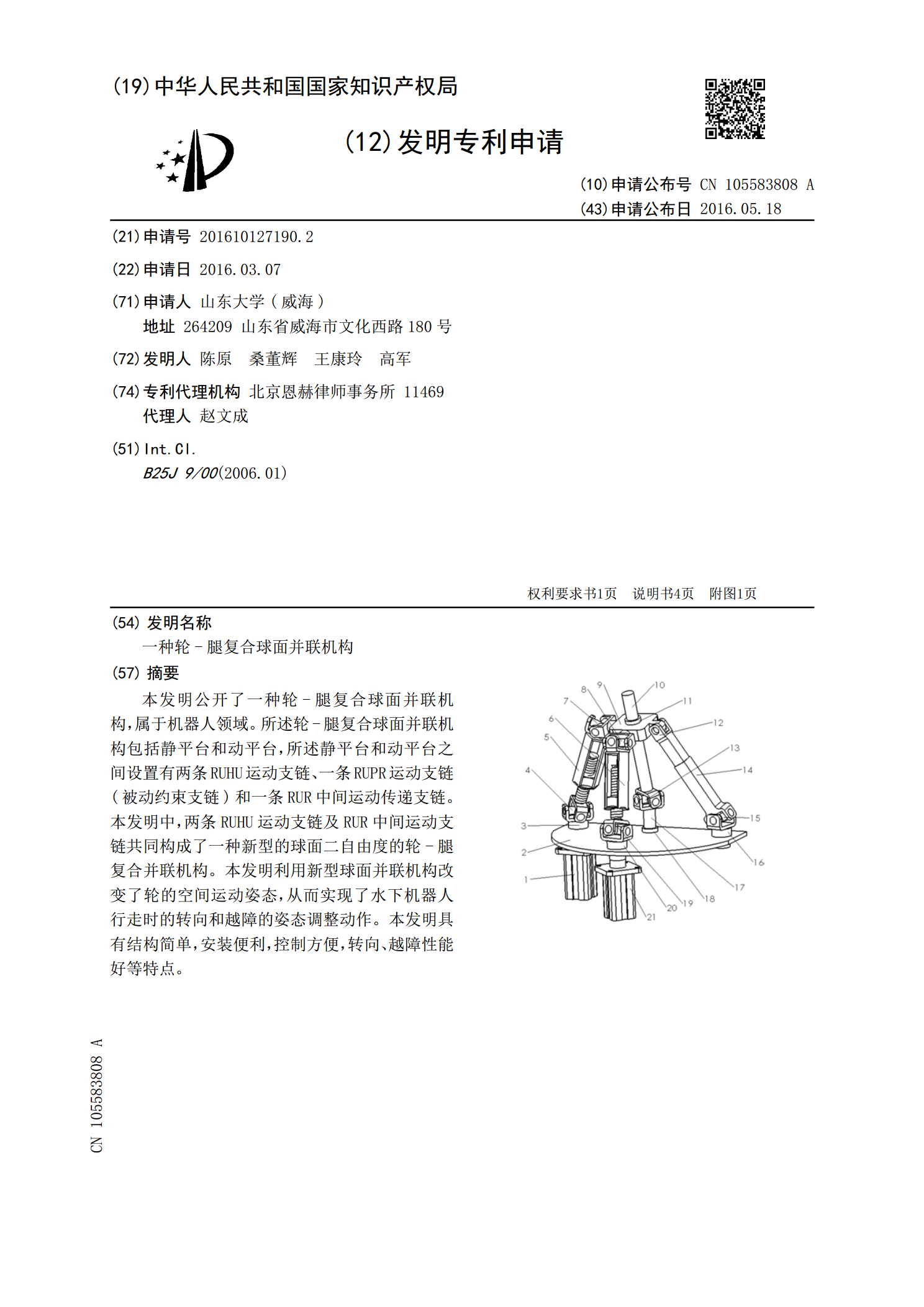
本发明公开了一种轮-腿复合球面并联机构,属于机器人领域。所述轮-腿复合球面并联机构包括静平台和动平台,所述静平台和动平台之间设置有两条RUHU运动支链、一条RUPR运动支链(被动约束支链)和一条RUR中间运动传递支链。本发明中,两条RUHU运动支链及RUR中间运动支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
一种二自由度球面并联机构.pdf
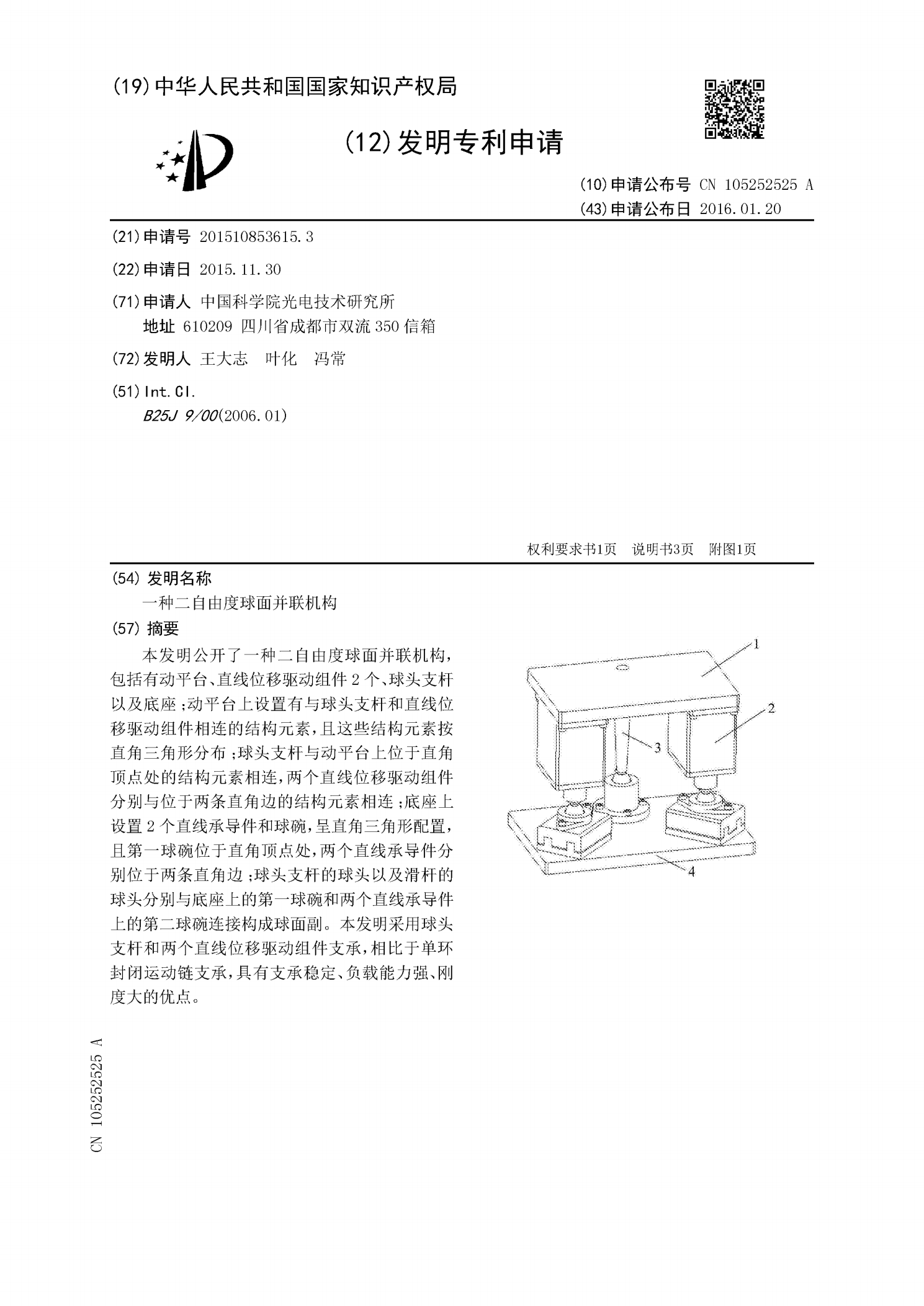
本发明公开了一种二自由度球面并联机构,包括有动平台、直线位移驱动组件2个、球头支杆以及底座;动平台上设置有与球头支杆和直线位移驱动组件相连的结构元素,且这些结构元素按直角三角形分布;球头支杆与动平台上位于直角顶点处的结构元素相连,两个直线位移驱动组件分别与位于两条直角边的结构元素相连;底座上设置2个直线承导件和球碗,呈直角三角形配置,且第一球碗位于直角顶点处,两个直线承导件分别位于两条直角边;球头支杆的球头以及滑杆的球头分别与底座上的第一球碗和两个直线承导件上的第二球碗连接构成球面副。本发明采用球头支杆和

3-RRP球面并联机构的运动学分析.docx
3-RRP球面并联机构的运动学分析标题:3-RRP球面并联机构的运动学分析摘要:球面并联机构是一种广泛应用于机器人、航空航天以及医疗器械等领域的重要机构类型。本论文以一种典型的3-RRP球面并联机构为对象,对其运动学进行了详细分析。首先,对该机构的结构和运动特点进行了介绍,然后通过建立合适的坐标系,推导出机构的运动学正解方程。通过对正解方程的分析,得出了球面并联机构的位移、速度以及加速度的表达式,并对其进行了性能分析。最后,通过数值仿真和实验验证了运动学分析结果的正确性。关键词:球面并联机构、运动学分析、