
一种AGV悬挂系统弹性调节方法及系统.pdf

依波****bc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种AGV悬挂系统弹性调节方法及系统.pdf
本发明公开了一种AGV悬挂系统弹性调节方法及系统,包括安装在AGV小车车轮底板上的若干弹性可调的丝杆弹性单元;所述丝杆弹性单元包括电机、联轴器、丝杆,滑块、弹簧;所述弹簧上端挂在滑块上,下端与车轮底板连接;所述电机通过联轴器带动丝杠,控制滑块上下,进而调整弹簧伸缩量。本发明通过AGV悬挂系统弹性可调来适应不同的路况,具有弹性调节范围广,实时性强等特点。

基于深度强化学习的AGV悬挂系统弹性调节方法.pdf
本发明公开了一种基于深度强化学习的AGV悬挂系统弹性调节方法,AGV小车车轮底板上分别安装若干由电机控制弹性可调的弹性单元;采集IMU数据流,获取垂直方向上的加速度数据,并绘制曲线a(t);判断是否需要调整等效弹性系数:当收到需要电机介入控制的信号后,通过神经网络算法开始计算调整动作;通过算法处理,控制电机,调整丝杆上滑块的位置,从而控制弹簧压缩量。本发明采用深度确定性策略梯度算法学习弹性组合单元的等效弹性系数自适应变化控制规律,以神经网络为载体,根据传感器对当前弹性单元软硬度的感知,自动计算各个弹簧丝杆
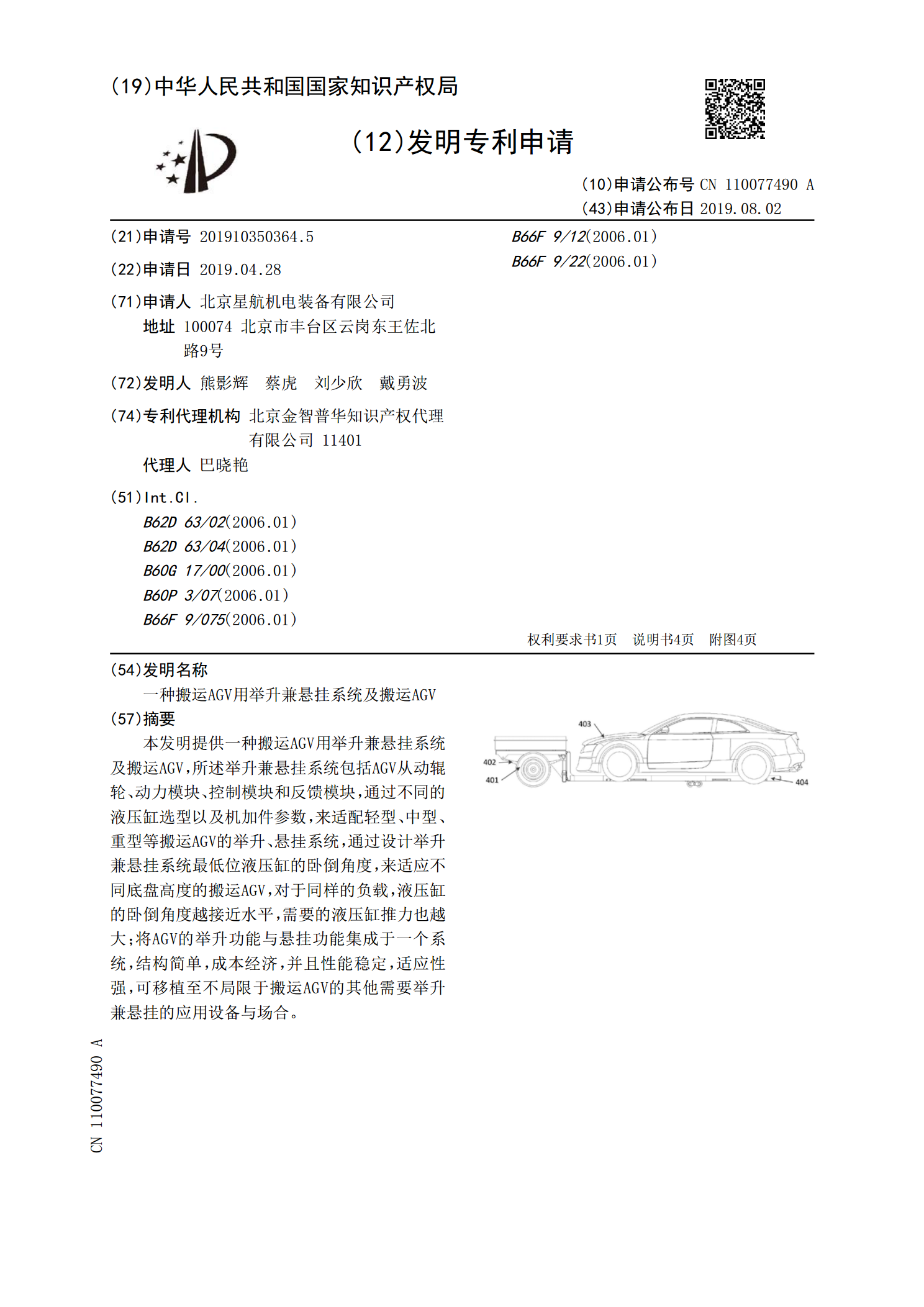
一种搬运AGV用举升兼悬挂系统及搬运AGV.pdf
本发明提供一种搬运AGV用举升兼悬挂系统及搬运AGV,所述举升兼悬挂系统包括AGV从动辊轮、动力模块、控制模块和反馈模块,通过不同的液压缸选型以及机加件参数,来适配轻型、中型、重型等搬运AGV的举升、悬挂系统,通过设计举升兼悬挂系统最低位液压缸的卧倒角度,来适应不同底盘高度的搬运AGV,对于同样的负载,液压缸的卧倒角度越接近水平,需要的液压缸推力也越大;将AGV的举升功能与悬挂功能集成于一个系统,结构简单,成本经济,并且性能稳定,适应性强,可移植至不局限于搬运AGV的其他需要举升兼悬挂的应用设备与场合。
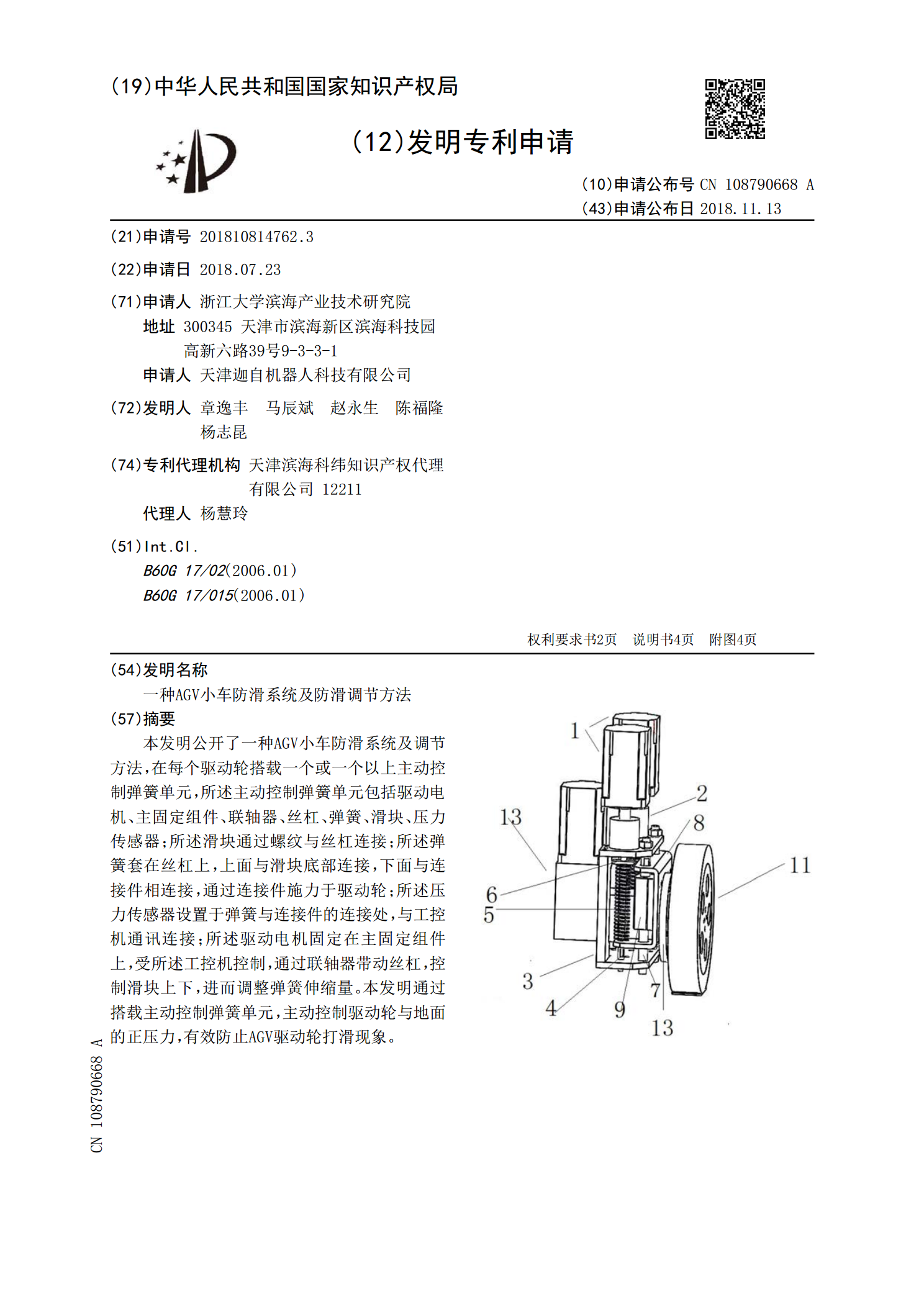
一种AGV小车防滑系统及防滑调节方法.pdf
本发明公开了一种AGV小车防滑系统及调节方法,在每个驱动轮搭载一个或一个以上主动控制弹簧单元,所述主动控制弹簧单元包括驱动电机、主固定组件、联轴器、丝杠、弹簧、滑块、压力传感器;所述滑块通过螺纹与丝杠连接;所述弹簧套在丝杠上,上面与滑块底部连接,下面与连接件相连接,通过连接件施力于驱动轮;所述压力传感器设置于弹簧与连接件的连接处,与工控机通讯连接;所述驱动电机固定在主固定组件上,受所述工控机控制,通过联轴器带动丝杠,控制滑块上下,进而调整弹簧伸缩量。本发明通过搭载主动控制弹簧单元,主动控制驱动轮与地面的正

一种用于调节车身高度的弹性系统及方法.pdf
本发明涉及一种用于调节车身高度的弹性系统及方法,该系统包括用于安装于车体八个支撑点的八个整体式油气分离油气弹簧,每个油气弹簧与驱动装置连接,用于在驱动装置的驱动下执行车体升降动作;驱动装置包括电机油泵组、二个调速阀、二个同步阀、八个液控单向阀、八个二位四通电磁阀及一个二位三通电磁阀;四通电磁阀及三通电磁阀与控制装置连接,控制装置连接有控制面板;每个油气弹簧进出油口内安装有防爆阀;每个油气弹簧的进出油口通过截止阀与液控单向阀连接;每个油气弹簧安装有一路角度传感器;每个油气弹簧的缸体上安装有用于检测各缸体内压