
可重复实现锁紧/解锁的空间电磁对接机构及对接方法.pdf

一吃****仪凡

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可重复实现锁紧/解锁的空间电磁对接机构及对接方法.pdf
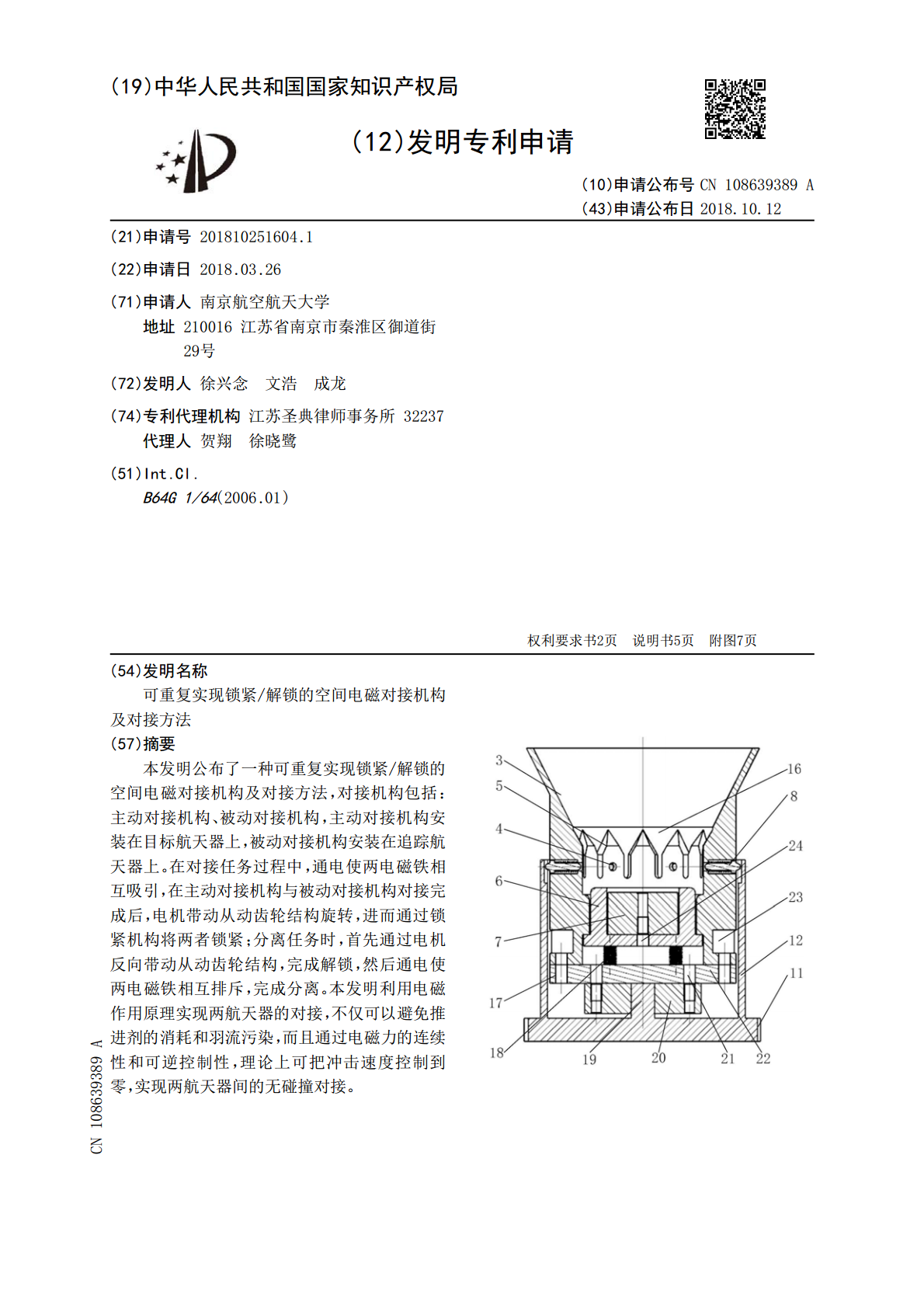
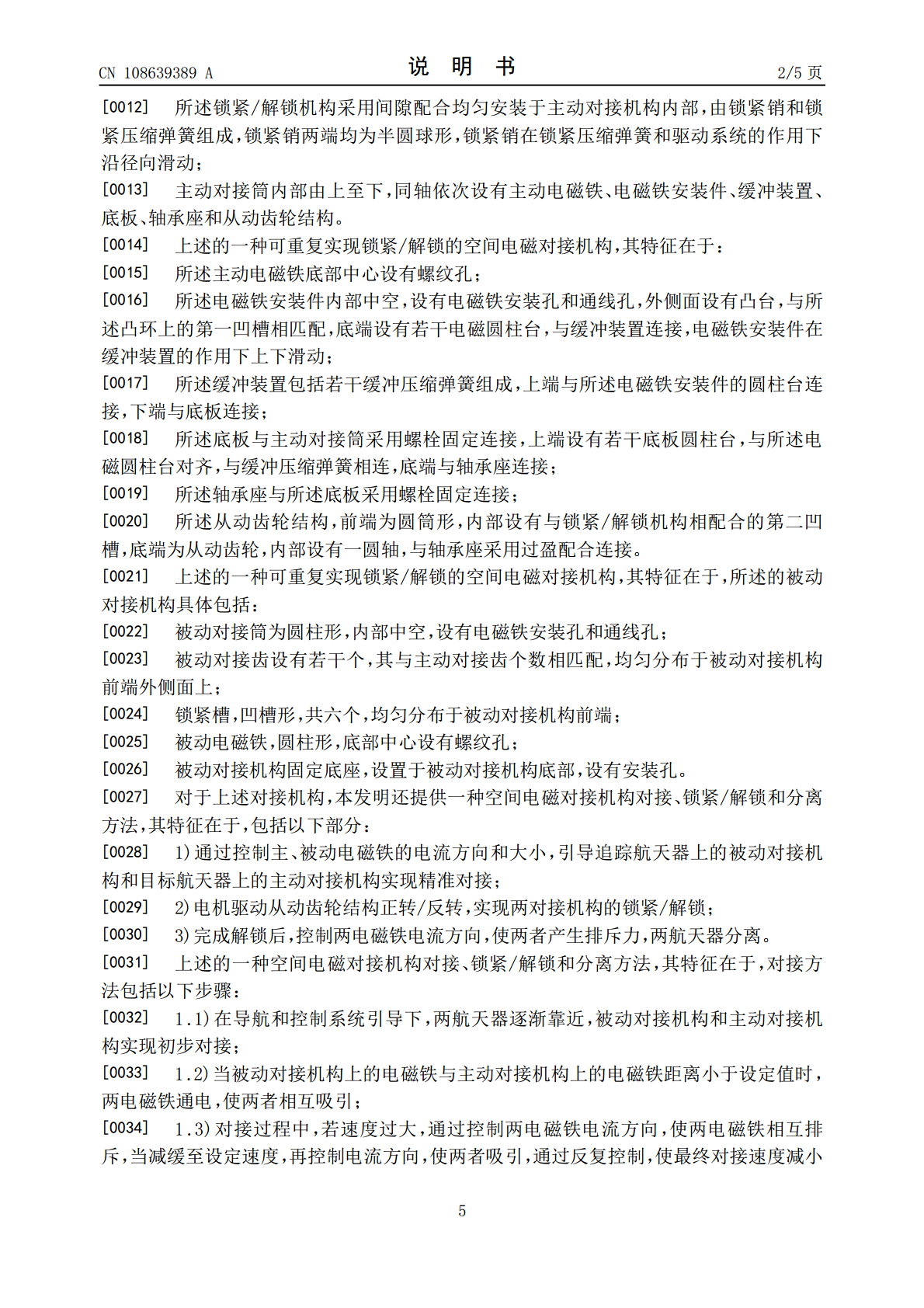
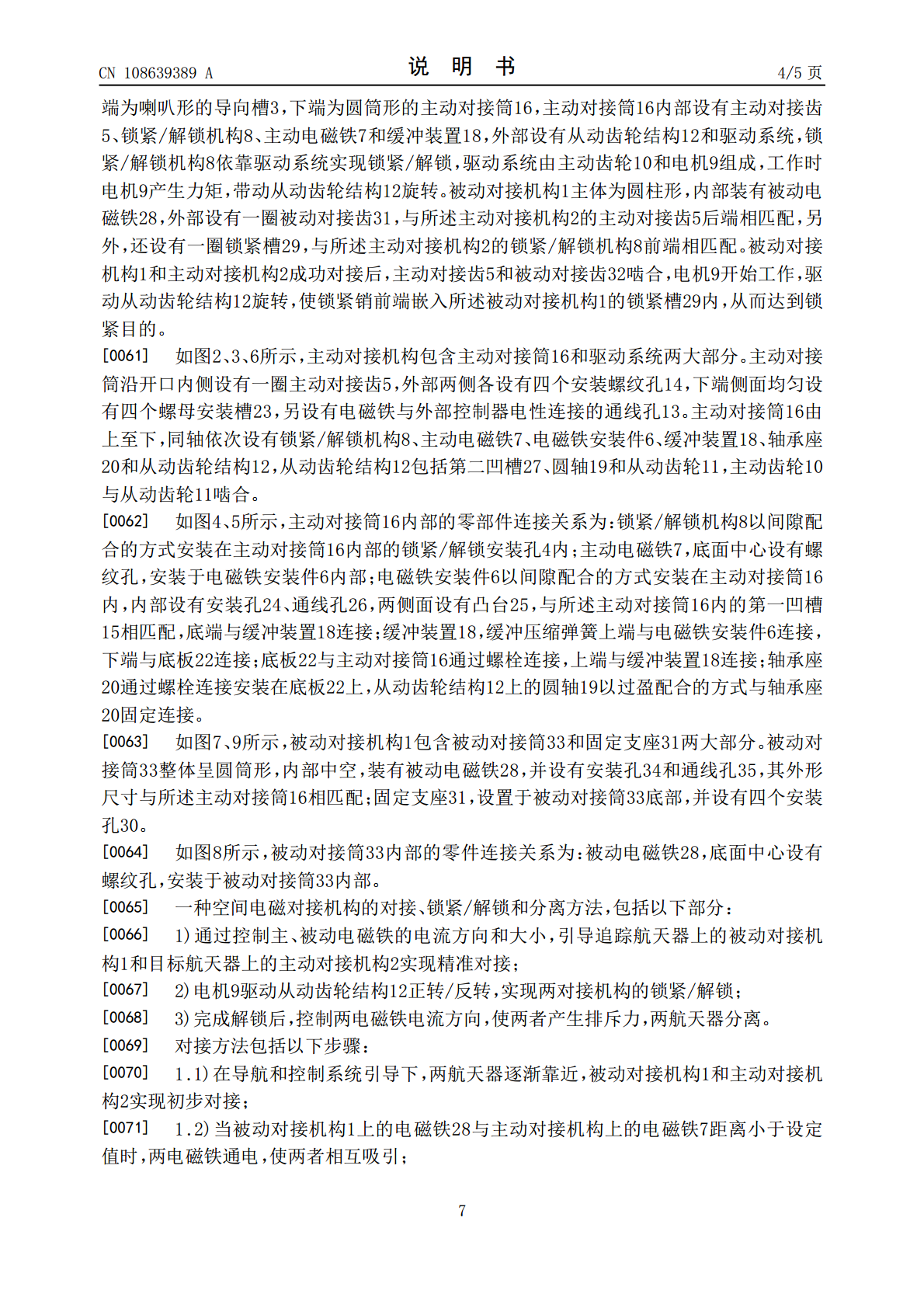
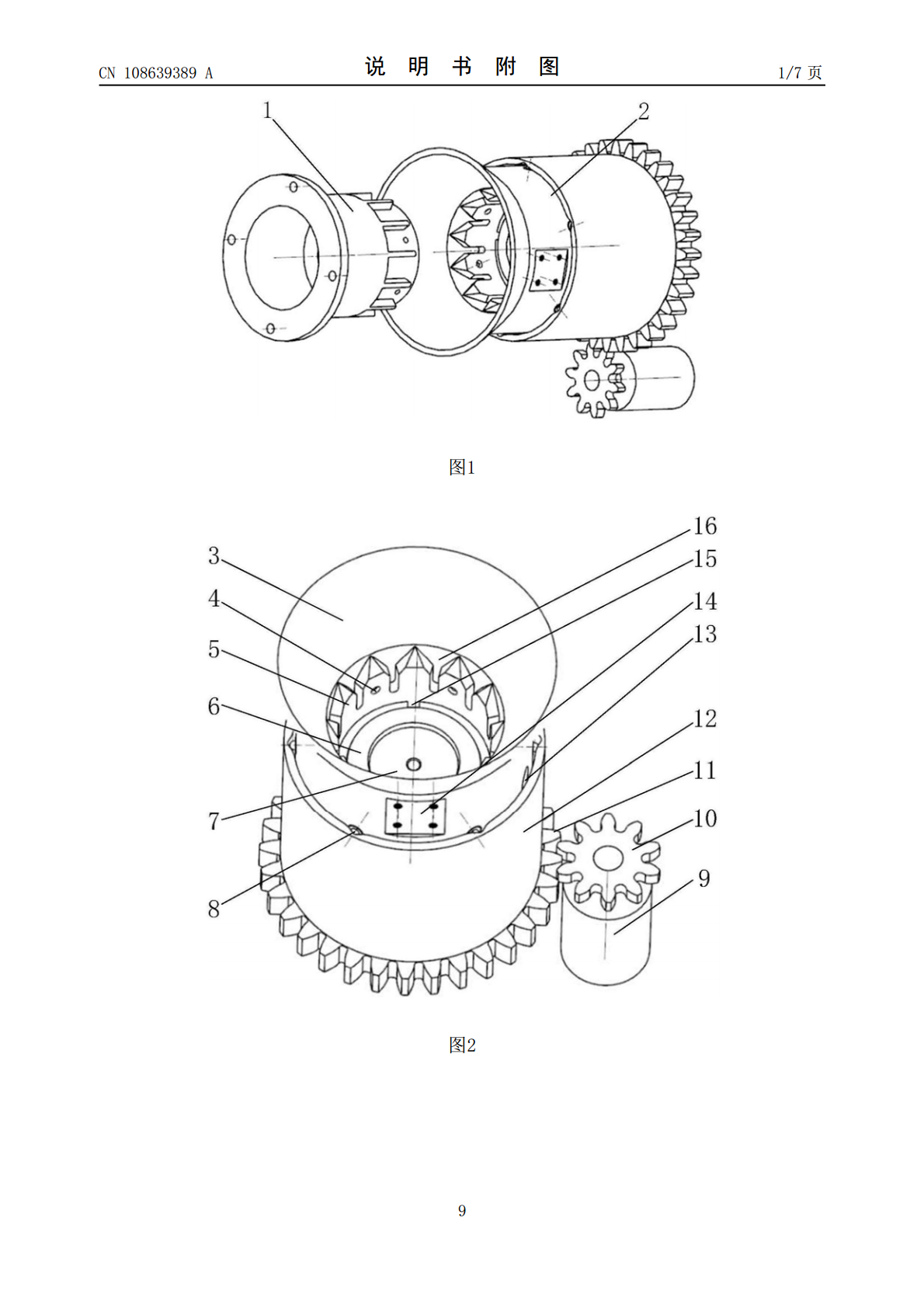
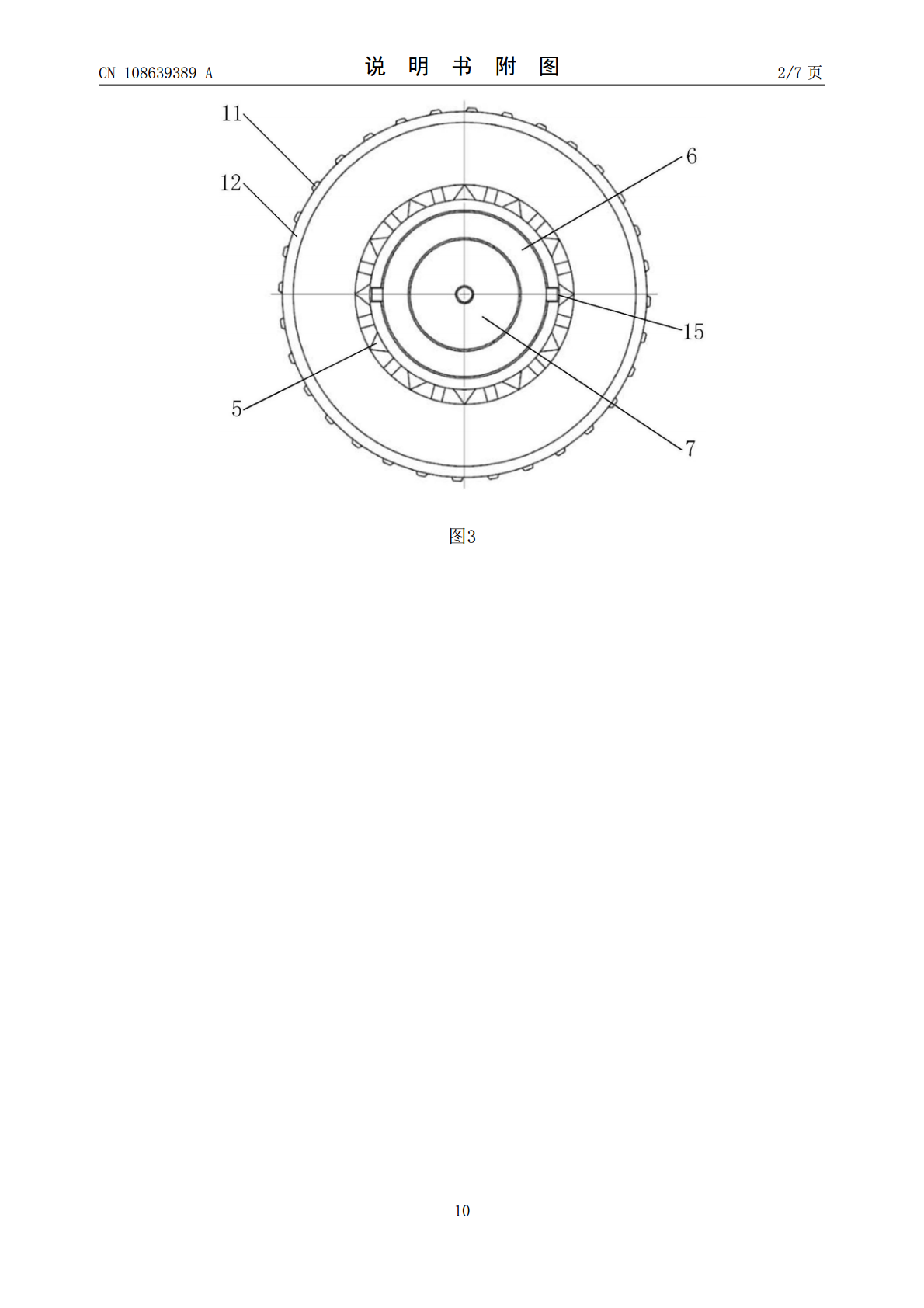
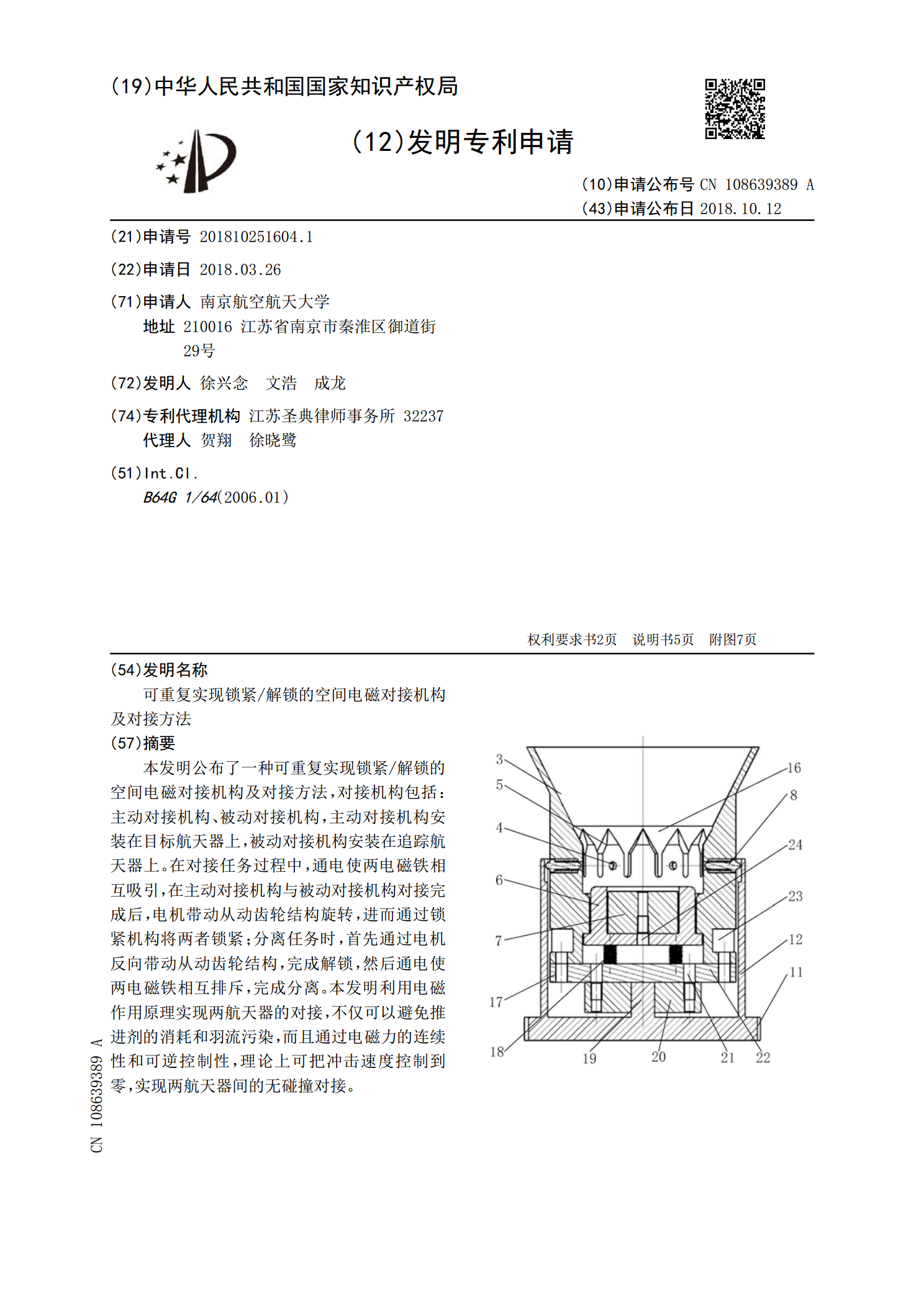
本发明公布了一种可重复实现锁紧/解锁的空间电磁对接机构及对接方法,对接机构包括:主动对接机构、被动对接机构,主动对接机构安装在目标航天器上,被动对接机构安装在追踪航天器上。在对接任务过程中,通电使两电磁铁相互吸引,在主动对接机构与被动对接机构对接完成后,电机带动从动齿轮结构旋转,进而通过锁紧机构将两者锁紧;分离任务时,首先通过电机反向带动从动齿轮结构,完成解锁,然后通电使两电磁铁相互排斥,完成分离。本发明利用电磁作用原理实现两航天器的对接,不仅可以避免推进剂的消耗和羽流污染,而且通过电磁力的连续性和可逆控
一种卫星对接捕获机构及空间分离释放与对接锁紧机构.pdf
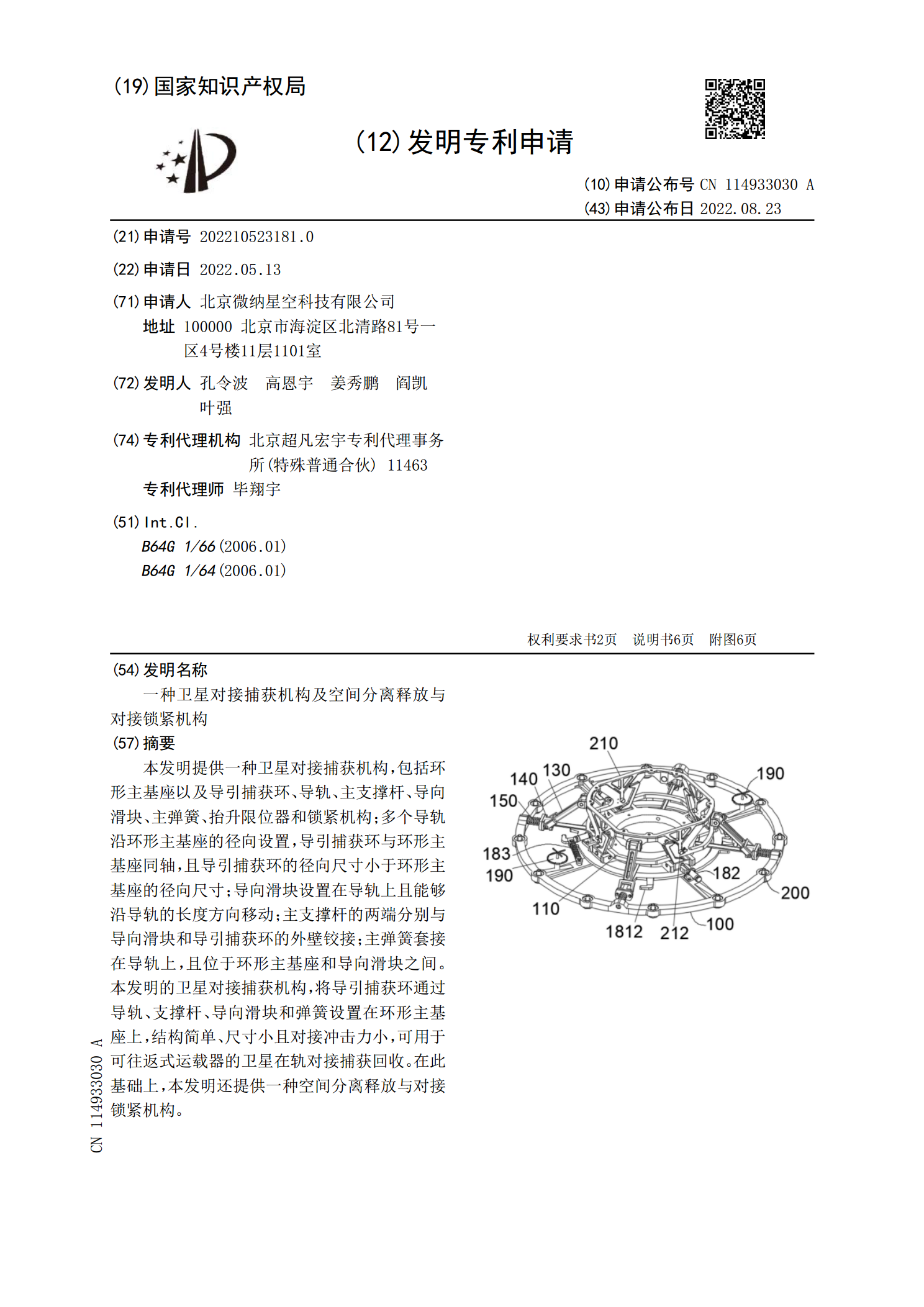
本发明提供一种卫星对接捕获机构,包括环形主基座以及导引捕获环、导轨、主支撑杆、导向滑块、主弹簧、抬升限位器和锁紧机构;多个导轨沿环形主基座的径向设置,导引捕获环与环形主基座同轴,且导引捕获环的径向尺寸小于环形主基座的径向尺寸;导向滑块设置在导轨上且能够沿导轨的长度方向移动;主支撑杆的两端分别与导向滑块和导引捕获环的外壁铰接;主弹簧套接在导轨上,且位于环形主基座和导向滑块之间。本发明的卫星对接捕获机构,将导引捕获环通过导轨、支撑杆、导向滑块和弹簧设置在环形主基座上,结构简单、尺寸小且对接冲击力小,可用于可往
一种对接环捕获锁紧机构及捕获锁紧方法.pdf
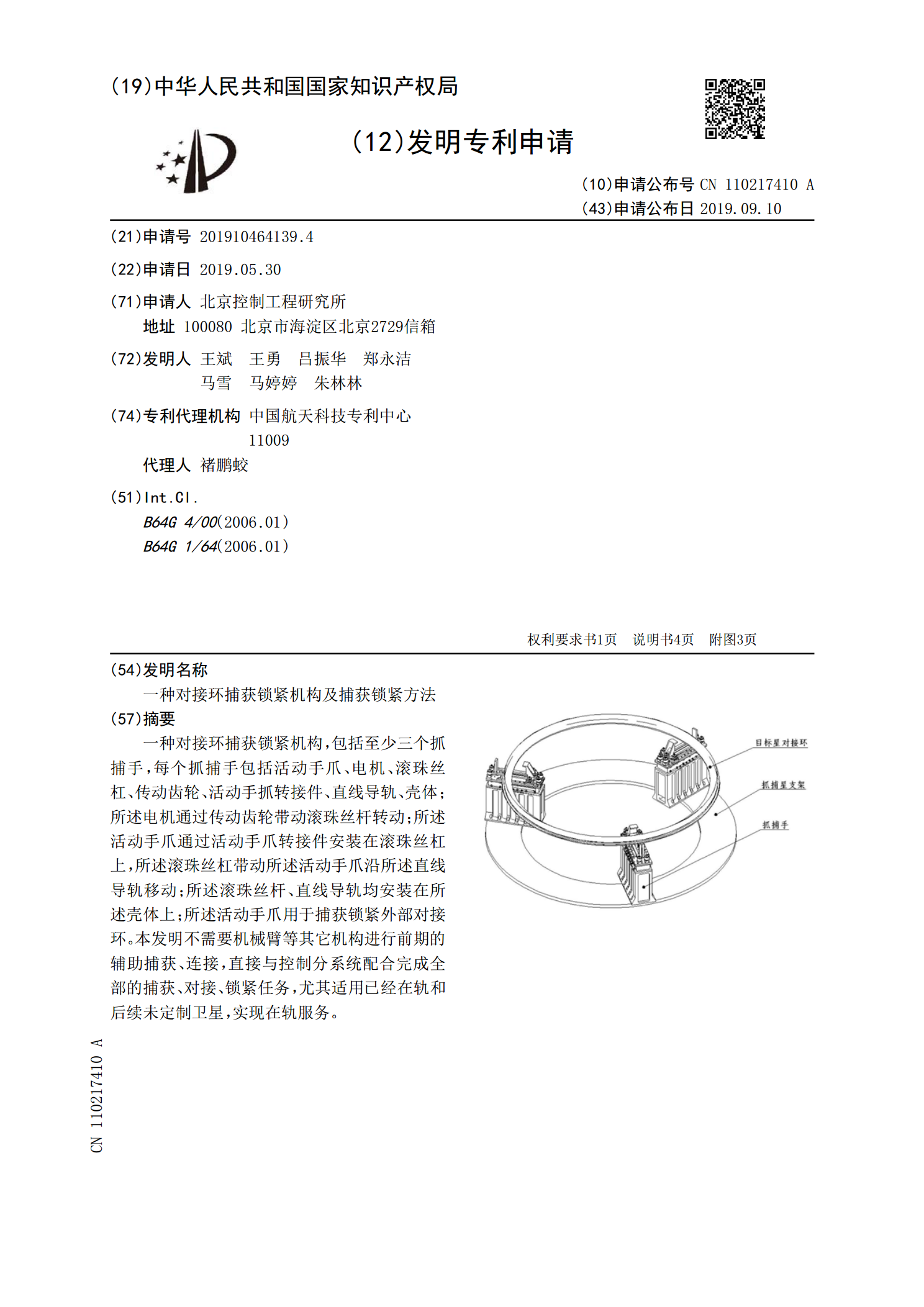
一种对接环捕获锁紧机构,包括至少三个抓捕手,每个抓捕手包括活动手爪、电机、滚珠丝杠、传动齿轮、活动手抓转接件、直线导轨、壳体;所述电机通过传动齿轮带动滚珠丝杆转动;所述活动手爪通过活动手爪转接件安装在滚珠丝杠上,所述滚珠丝杠带动所述活动手爪沿所述直线导轨移动;所述滚珠丝杆、直线导轨均安装在所述壳体上;所述活动手爪用于捕获锁紧外部对接环。本发明不需要机械臂等其它机构进行前期的辅助捕获、连接,直接与控制分系统配合完成全部的捕获、对接、锁紧任务,尤其适用已经在轨和后续未定制卫星,实现在轨服务。

一种具有可重复和应急强制解锁功能的锁紧机构.pdf
一种可重复、具有应急强制解锁功能的形位锁紧机构,可作为磁悬浮飞轮或磁悬浮控制力矩陀螺转子的保护装置。主要由锁紧驱动器、锁柱、支架、微动开关、强制驱动器组成。锁紧驱动器和强制驱动器都由磁铁座、永磁体、电工纯铁环、吸力盘、线圈和活动柱组成。锁柱两端分别为锁紧工作面和传动工作面,通过将活动柱的上下移动转化成锁柱绕转轴的旋转从而实现转子的锁紧或解锁。通过微动开关触点与锁柱的离合判断转子锁紧状态。锁紧驱动器失效时,强制驱动器推动锁紧驱动器活动柱移动实现应急强制解锁。本发明的锁紧装置保护了磁悬浮飞轮或磁悬浮
联动式空间对接锁紧与分离装置及方法.pdf
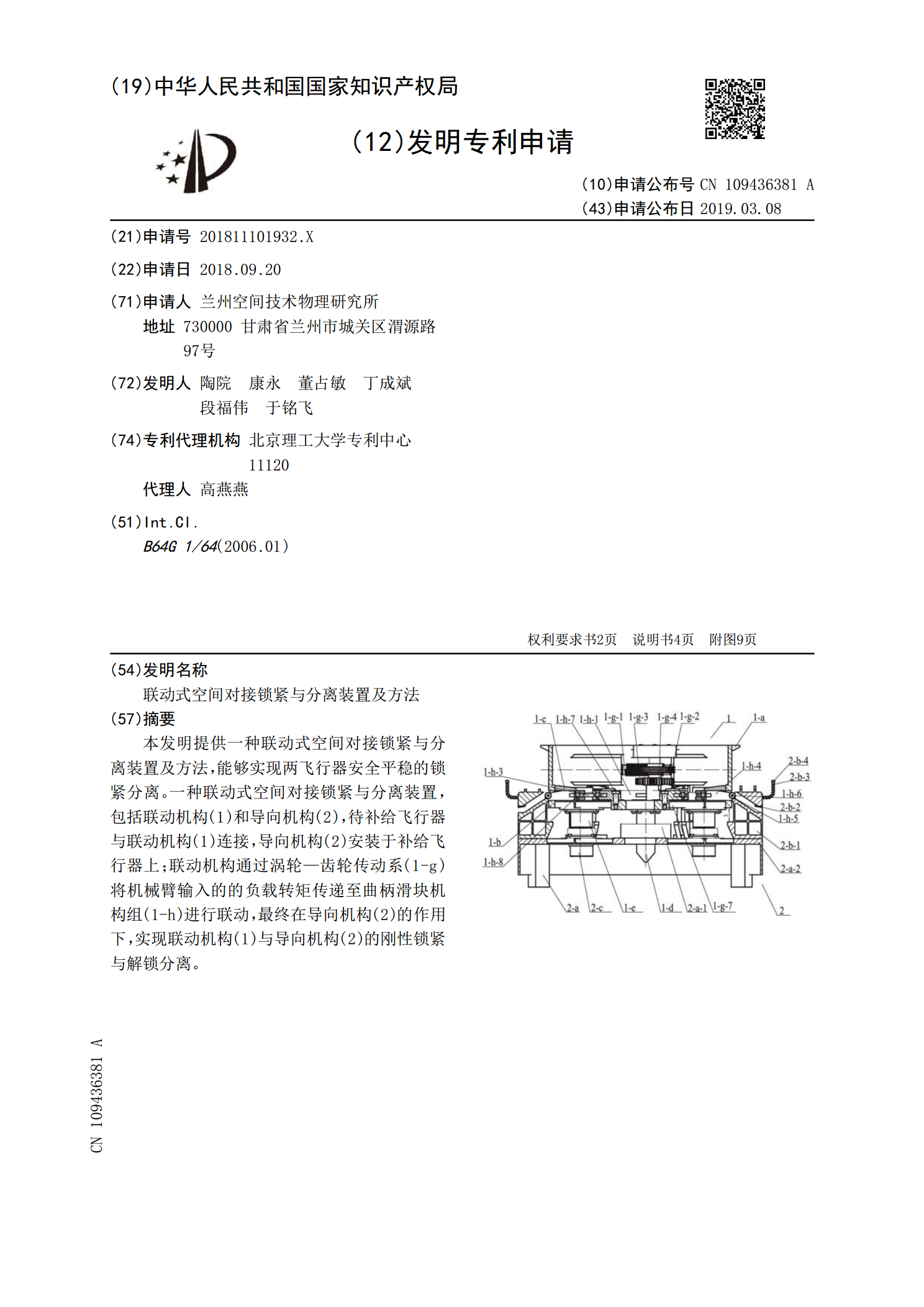
本发明提供一种联动式空间对接锁紧与分离装置及方法,能够实现两飞行器安全平稳的锁紧分离。一种联动式空间对接锁紧与分离装置,包括联动机构(1)和导向机构(2),待补给飞行器与联动机构(1)连接,导向机构(2)安装于补给飞行器上;联动机构通过涡轮—齿轮传动系(1‑g)将机械臂输入的的负载转矩传递至曲柄滑块机构组(1‑h)进行联动,最终在导向机构(2)的作用下,实现联动机构(1)与导向机构(2)的刚性锁紧与解锁分离。