
可伸缩万向轮装置.pdf

白凡****12

1/9
2/9
3/9

4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可伸缩万向轮装置.pdf
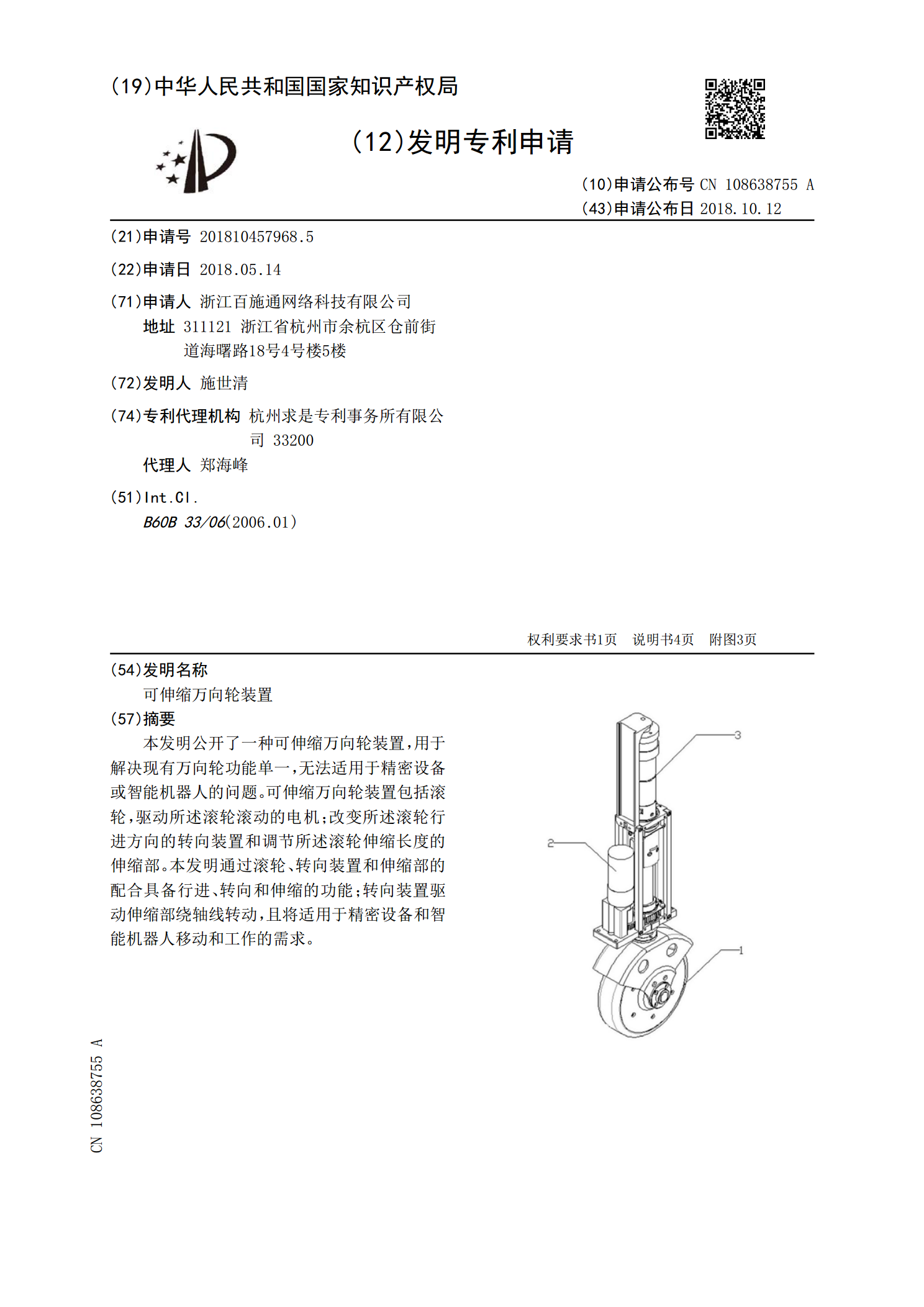
本发明公开了一种可伸缩万向轮装置,用于解决现有万向轮功能单一,无法适用于精密设备或智能机器人的问题。可伸缩万向轮装置包括滚轮,驱动所述滚轮滚动的电机;改变所述滚轮行进方向的转向装置和调节所述滚轮伸缩长度的伸缩部。本发明通过滚轮、转向装置和伸缩部的配合具备行进、转向和伸缩的功能;转向装置驱动伸缩部绕轴线转动,且将适用于精密设备和智能机器人移动和工作的需求。
一种可伸缩型万向轮.pdf
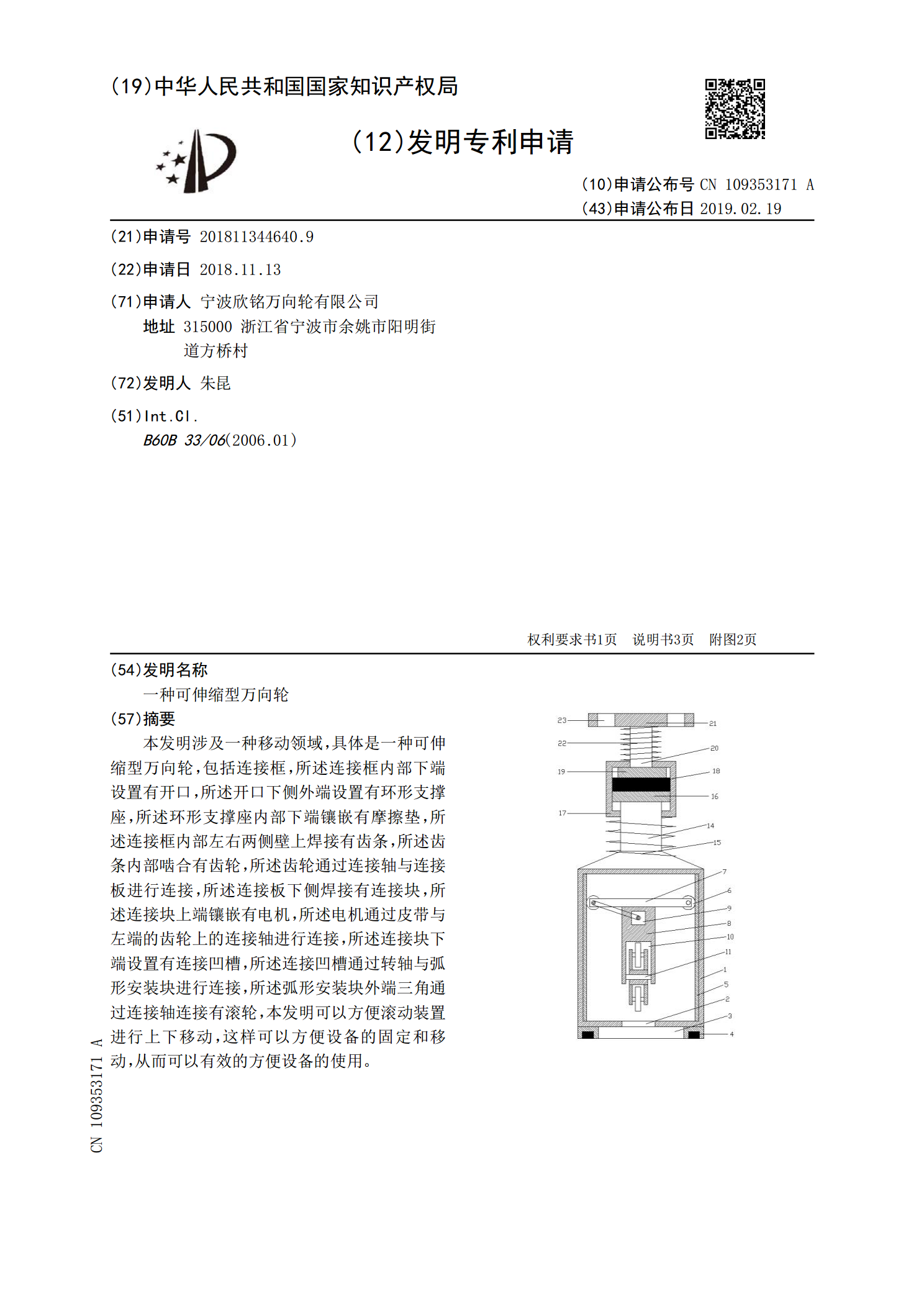
本发明涉及一种移动领域,具体是一种可伸缩型万向轮,包括连接框,所述连接框内部下端设置有开口,所述开口下侧外端设置有环形支撑座,所述环形支撑座内部下端镶嵌有摩擦垫,所述连接框内部左右两侧壁上焊接有齿条,所述齿条内部啮合有齿轮,所述齿轮通过连接轴与连接板进行连接,所述连接板下侧焊接有连接块,所述连接块上端镶嵌有电机,所述电机通过皮带与左端的齿轮上的连接轴进行连接,所述连接块下端设置有连接凹槽,所述连接凹槽通过转轴与弧形安装块进行连接,所述弧形安装块外端三角通过连接轴连接有滚轮,本发明可以方便滚动装置进行上下移
可伸缩遮荫装置.pdf
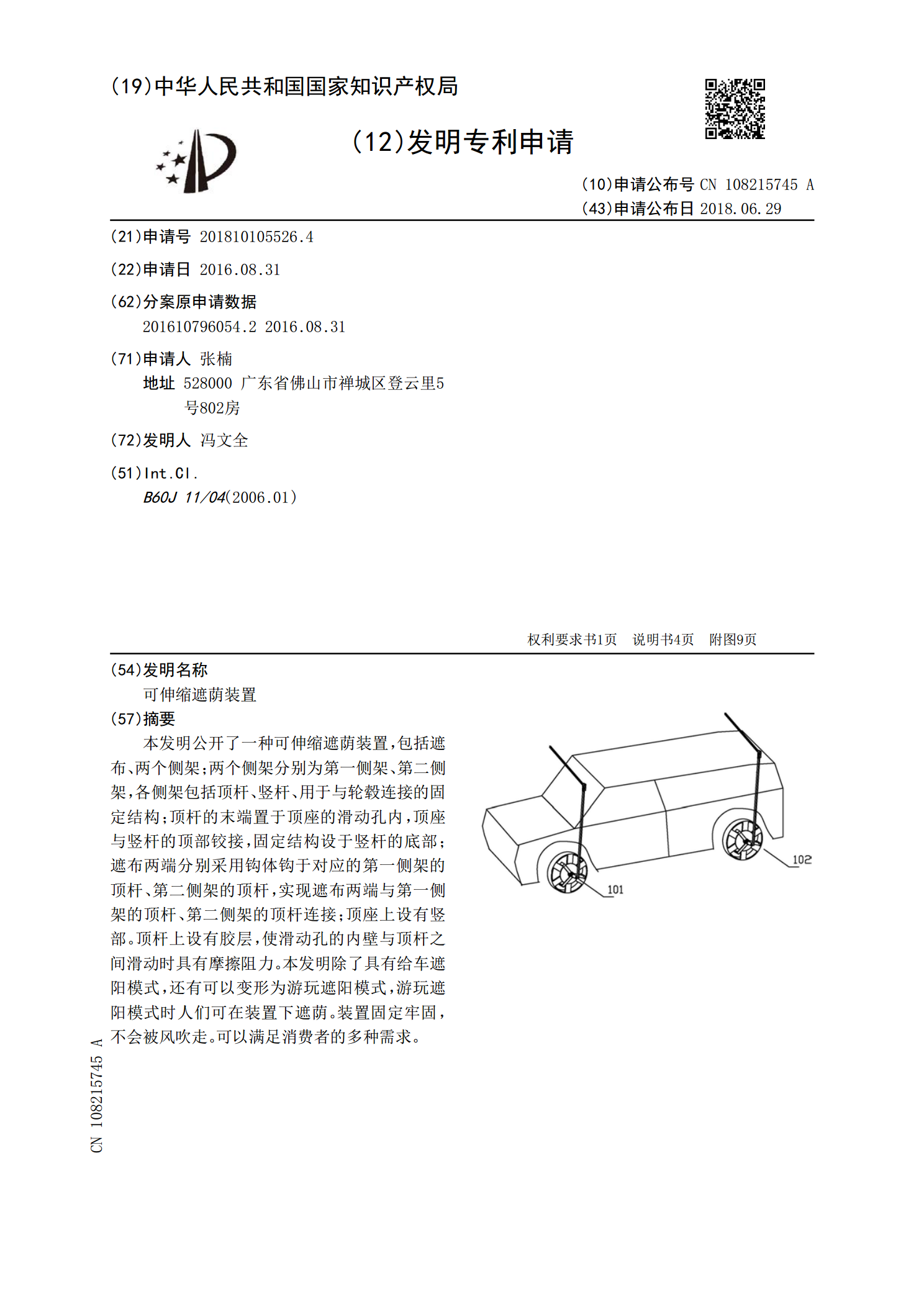
本发明公开了一种可伸缩遮荫装置,包括遮布、两个侧架;两个侧架分别为第一侧架、第二侧架,各侧架包括顶杆、竖杆、用于与轮毂连接的固定结构;顶杆的末端置于顶座的滑动孔内,顶座与竖杆的顶部铰接,固定结构设于竖杆的底部;遮布两端分别采用钩体钩于对应的第一侧架的顶杆、第二侧架的顶杆,实现遮布两端与第一侧架的顶杆、第二侧架的顶杆连接;顶座上设有竖部。顶杆上设有胶层,使滑动孔的内壁与顶杆之间滑动时具有摩擦阻力。本发明除了具有给车遮阳模式,还有可以变形为游玩遮阳模式,游玩遮阳模式时人们可在装置下遮荫。装置固定牢固,不会被风

多节可伸缩装置.pdf
一种多节可伸缩装置,包括一中空的第一伸缩节和一套接于所述第一伸缩节的内腔中的第二伸缩节,所述第一伸缩节的一第一侧壁的内侧面上设有一直线滑轨,所述第一伸缩节的一第二侧壁和一第三侧壁的内侧面上分别设有一直线滑道,所述第二伸缩节的一第四侧壁的外侧面上设有一可在所述直线滑轨上滑动的直线滑槽,所述第二伸缩节的一第五侧壁和一第六侧壁的外侧面上分别设有一可在所述直线滑道内滑动的凸轮随动器。

可伸缩显示装置.pdf
根据本公开的一个方面的可伸缩显示装置包括:第一基板,包括有源区、与有源区相邻的非有源区、以及从非有源区的侧面延伸的焊盘区;多个第二基板,其在第一基板上具有彼此间隔开的独立的形状;以及连接线,其电连接设置在多个第二基板中的彼此相邻的第二基板上的焊盘,其中多个第二基板中的设置在非有源区和焊盘区中的多个第二基板可以被设置成对应于设置在有源区上的多个第二基板。因此,根据本公开的一个方面的可伸缩显示装置不仅可以在整个有源区中延伸,而且可以在非有源区和焊盘区中延伸。