
一种助行康复及步态矫正系统.pdf

努力****向丝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种助行康复及步态矫正系统.pdf
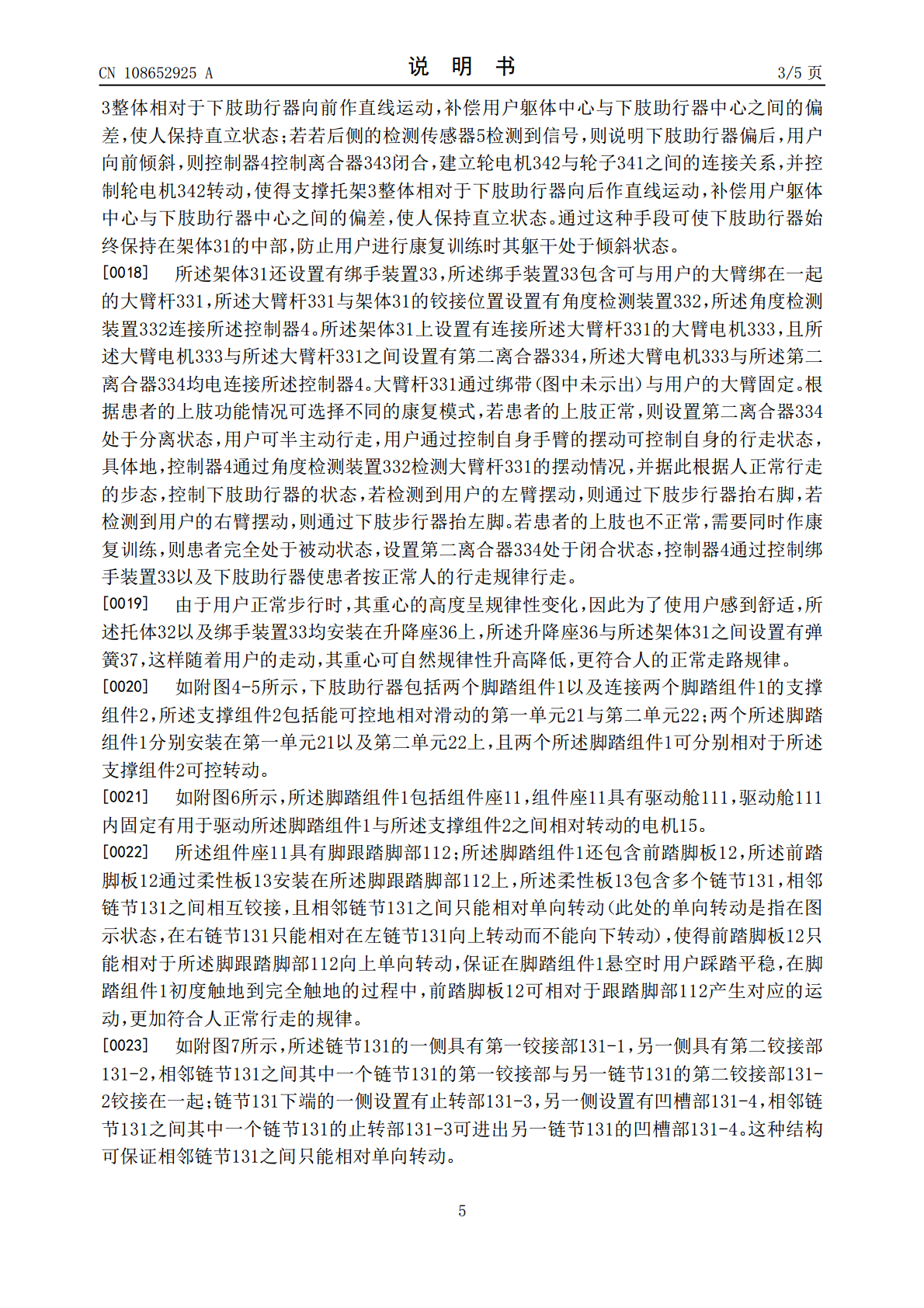
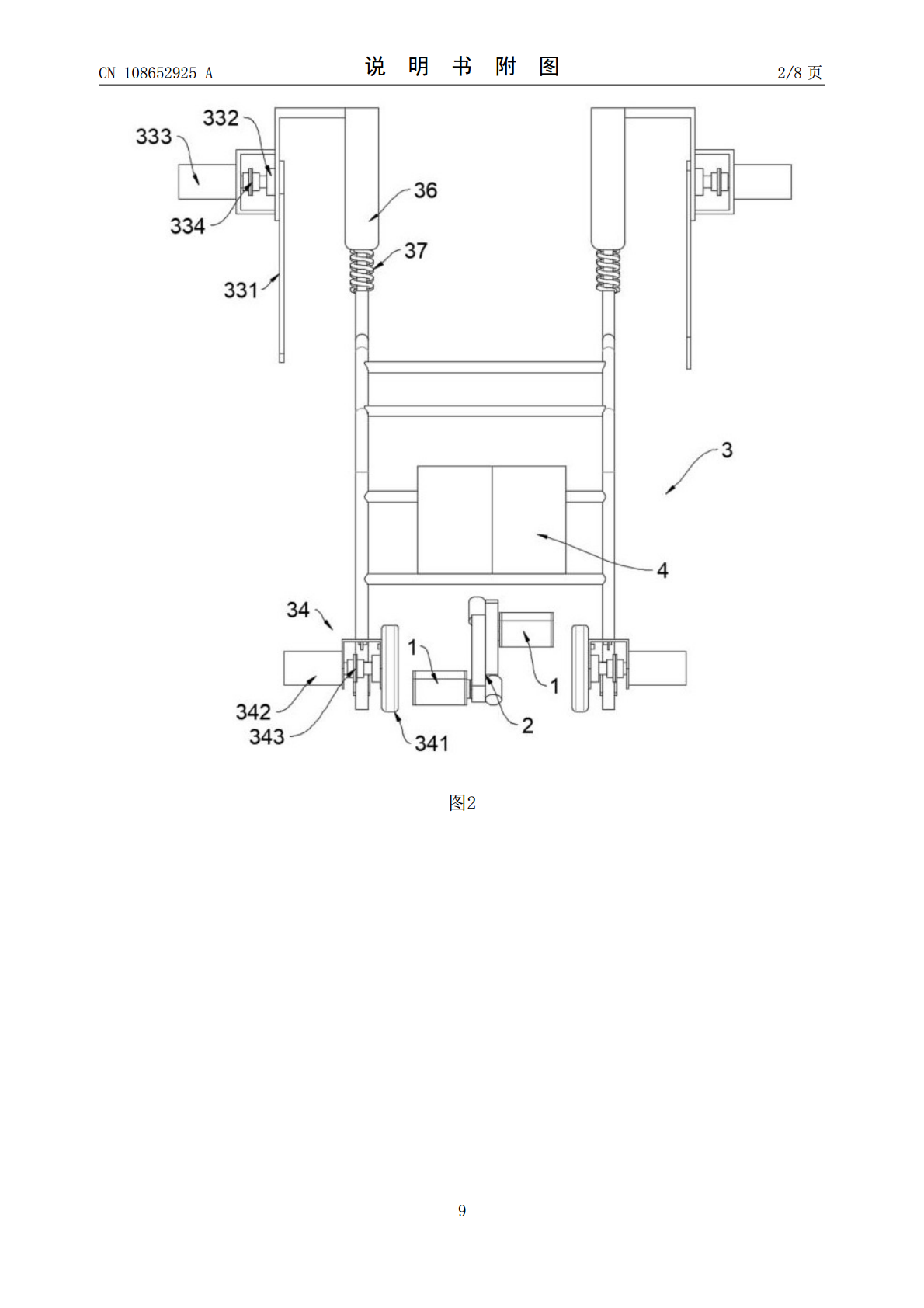
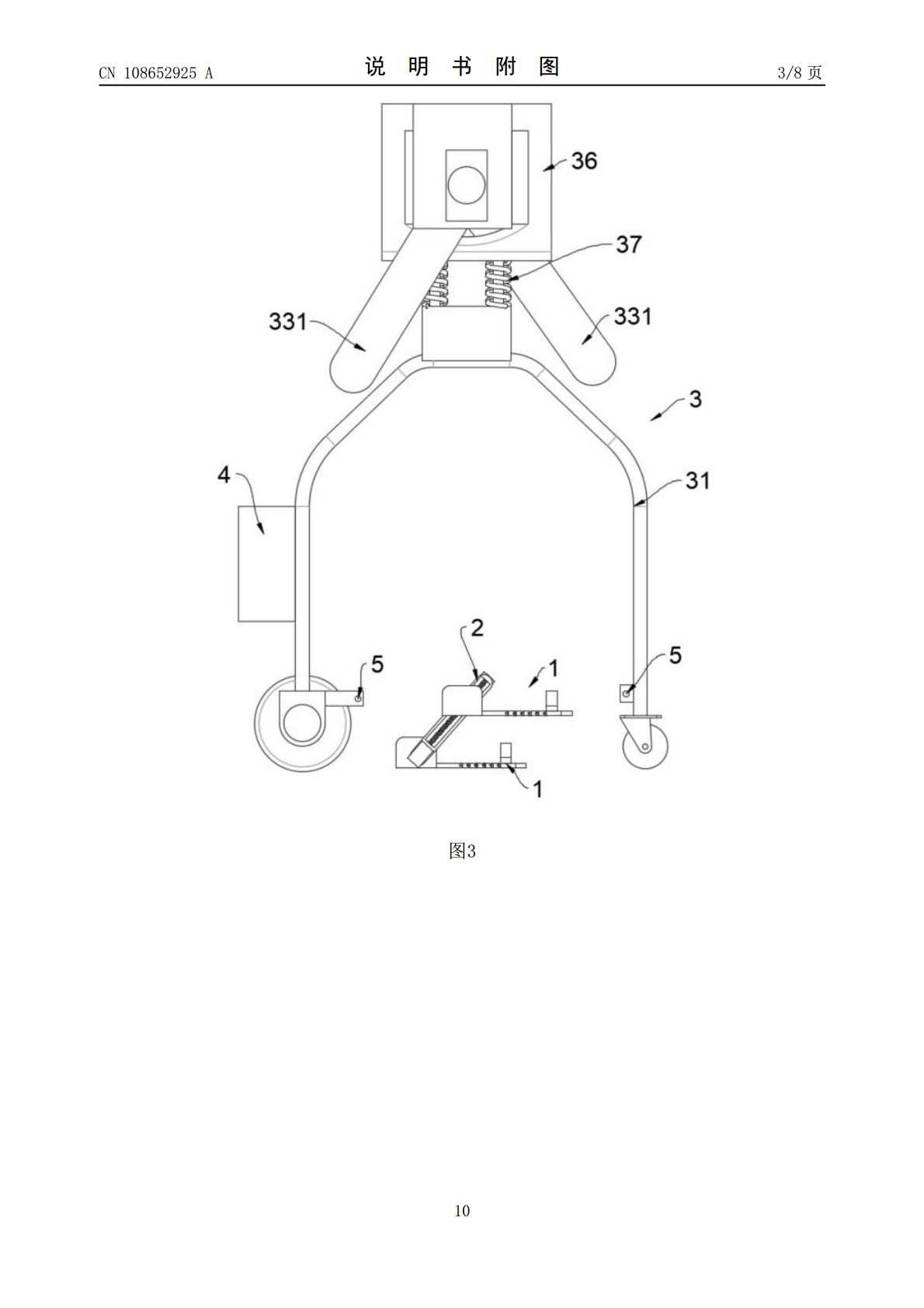
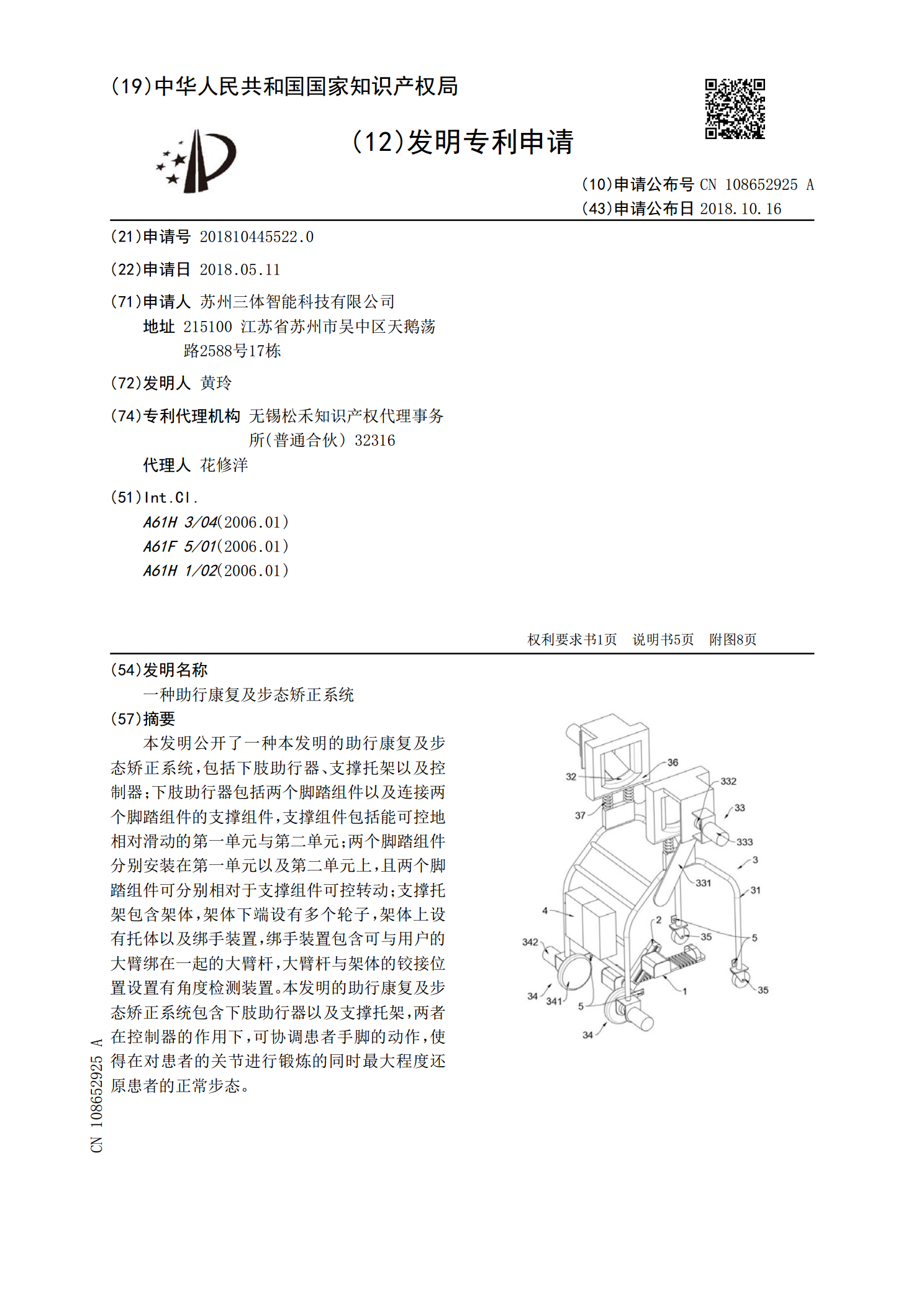
本发明公开了一种本发明的助行康复及步态矫正系统,包括下肢助行器、支撑托架以及控制器;下肢助行器包括两个脚踏组件以及连接两个脚踏组件的支撑组件,支撑组件包括能可控地相对滑动的第一单元与第二单元;两个脚踏组件分别安装在第一单元以及第二单元上,且两个脚踏组件可分别相对于支撑组件可控转动;支撑托架包含架体,架体下端设有多个轮子,架体上设有托体以及绑手装置,绑手装置包含可与用户的大臂绑在一起的大臂杆,大臂杆与架体的铰接位置设置有角度检测装置。本发明的助行康复及步态矫正系统包含下肢助行器以及支撑托架,两者在控制器的作
一种步态助行训练装置.pdf
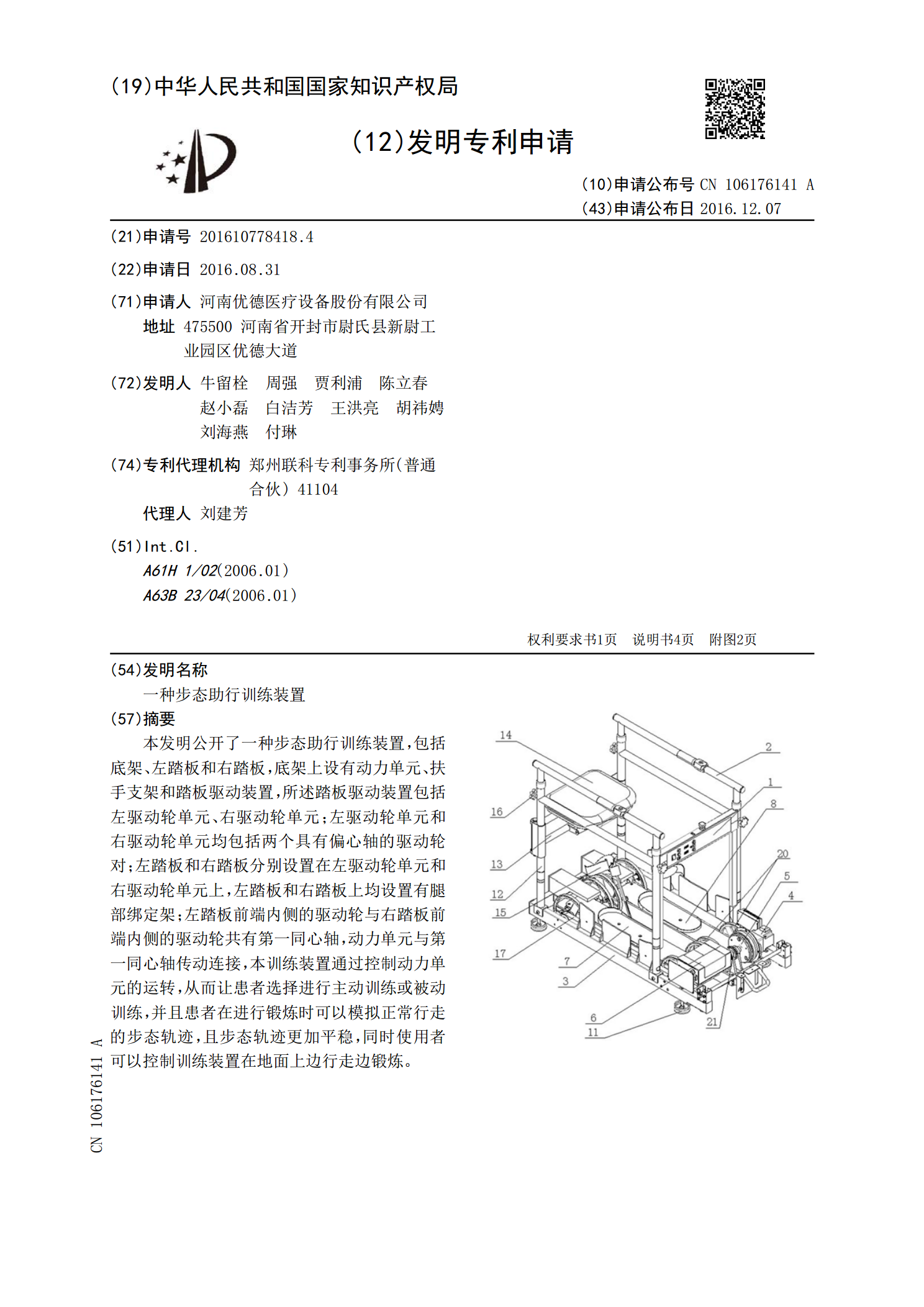
本发明公开了一种步态助行训练装置,包括底架、左踏板和右踏板,底架上设有动力单元、扶手支架和踏板驱动装置,所述踏板驱动装置包括左驱动轮单元、右驱动轮单元;左驱动轮单元和右驱动轮单元均包括两个具有偏心轴的驱动轮对;左踏板和右踏板分别设置在左驱动轮单元和右驱动轮单元上,左踏板和右踏板上均设置有腿部绑定架;左踏板前端内侧的驱动轮与右踏板前端内侧的驱动轮共有第一同心轴,动力单元与第一同心轴传动连接,本训练装置通过控制动力单元的运转,从而让患者选择进行主动训练或被动训练,并且患者在进行锻炼时可以模拟正常行走的步态轨迹
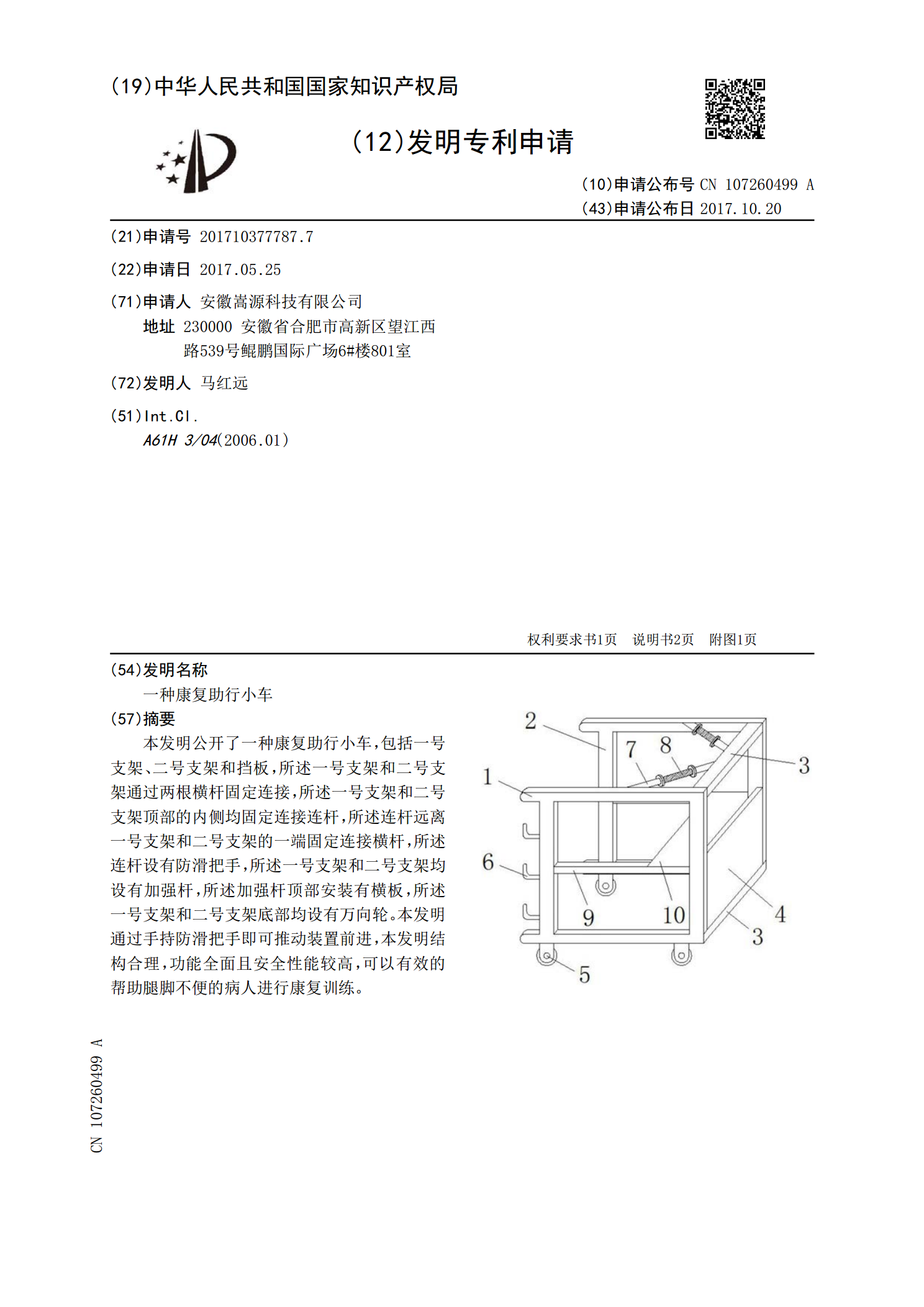
一种康复助行小车.pdf
本发明公开了一种康复助行小车,包括一号支架、二号支架和挡板,所述一号支架和二号支架通过两根横杆固定连接,所述一号支架和二号支架顶部的内侧均固定连接连杆,所述连杆远离一号支架和二号支架的一端固定连接横杆,所述连杆设有防滑把手,所述一号支架和二号支架均设有加强杆,所述加强杆顶部安装有横板,所述一号支架和二号支架底部均设有万向轮。本发明通过手持防滑把手即可推动装置前进,本发明结构合理,功能全面且安全性能较高,可以有效的帮助腿脚不便的病人进行康复训练。
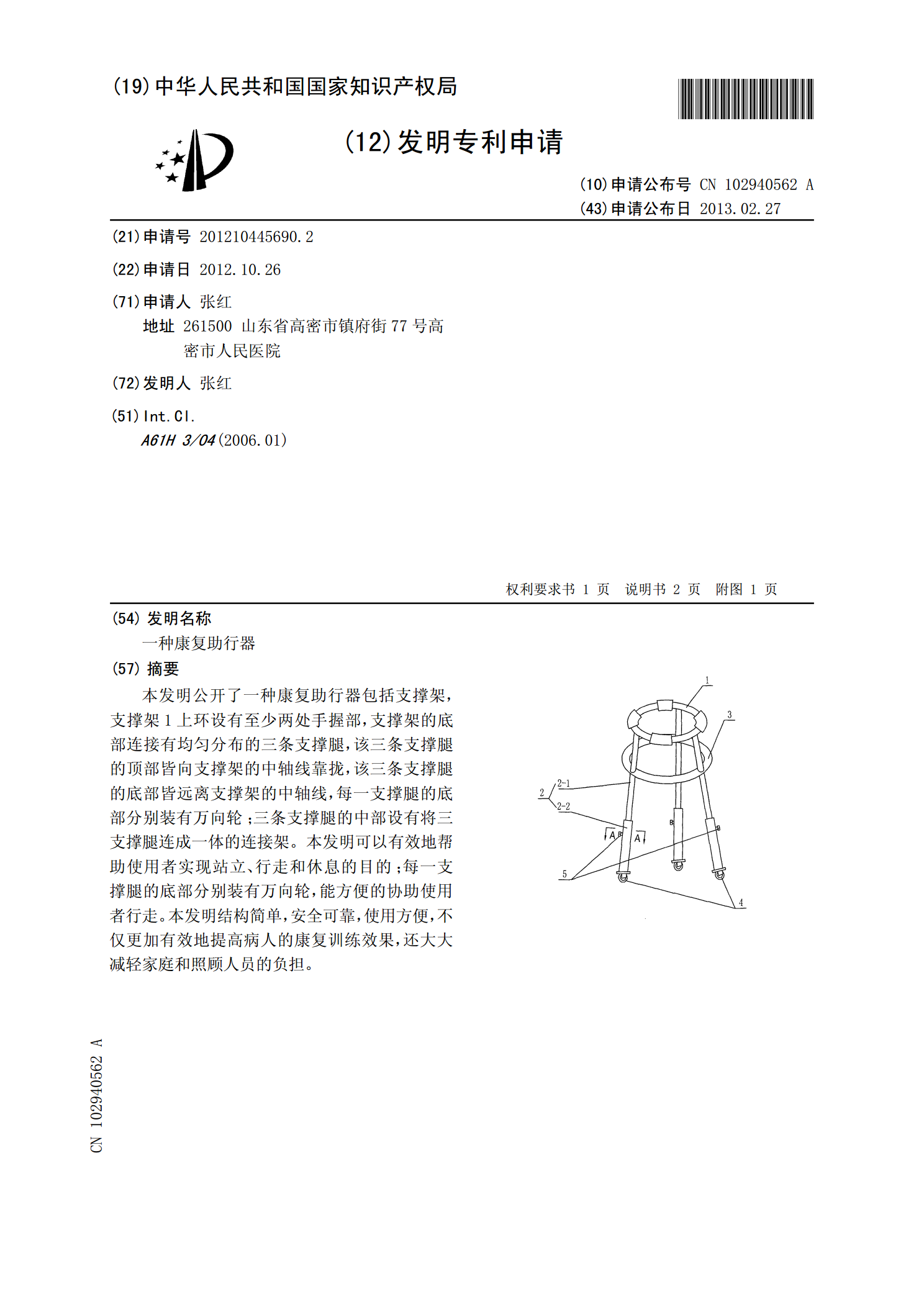
一种康复助行器.pdf
本发明公开了一种康复助行器包括支撑架,支撑架1上环设有至少两处手握部,支撑架的底部连接有均匀分布的三条支撑腿,该三条支撑腿的顶部皆向支撑架的中轴线靠拢,该三条支撑腿的底部皆远离支撑架的中轴线,每一支撑腿的底部分别装有万向轮;三条支撑腿的中部设有将三支撑腿连成一体的连接架。本发明可以有效地帮助使用者实现站立、行走和休息的目的;每一支撑腿的底部分别装有万向轮,能方便的协助使用者行走。本发明结构简单,安全可靠,使用方便,不仅更加有效地提高病人的康复训练效果,还大大减轻家庭和照顾人员的负担。
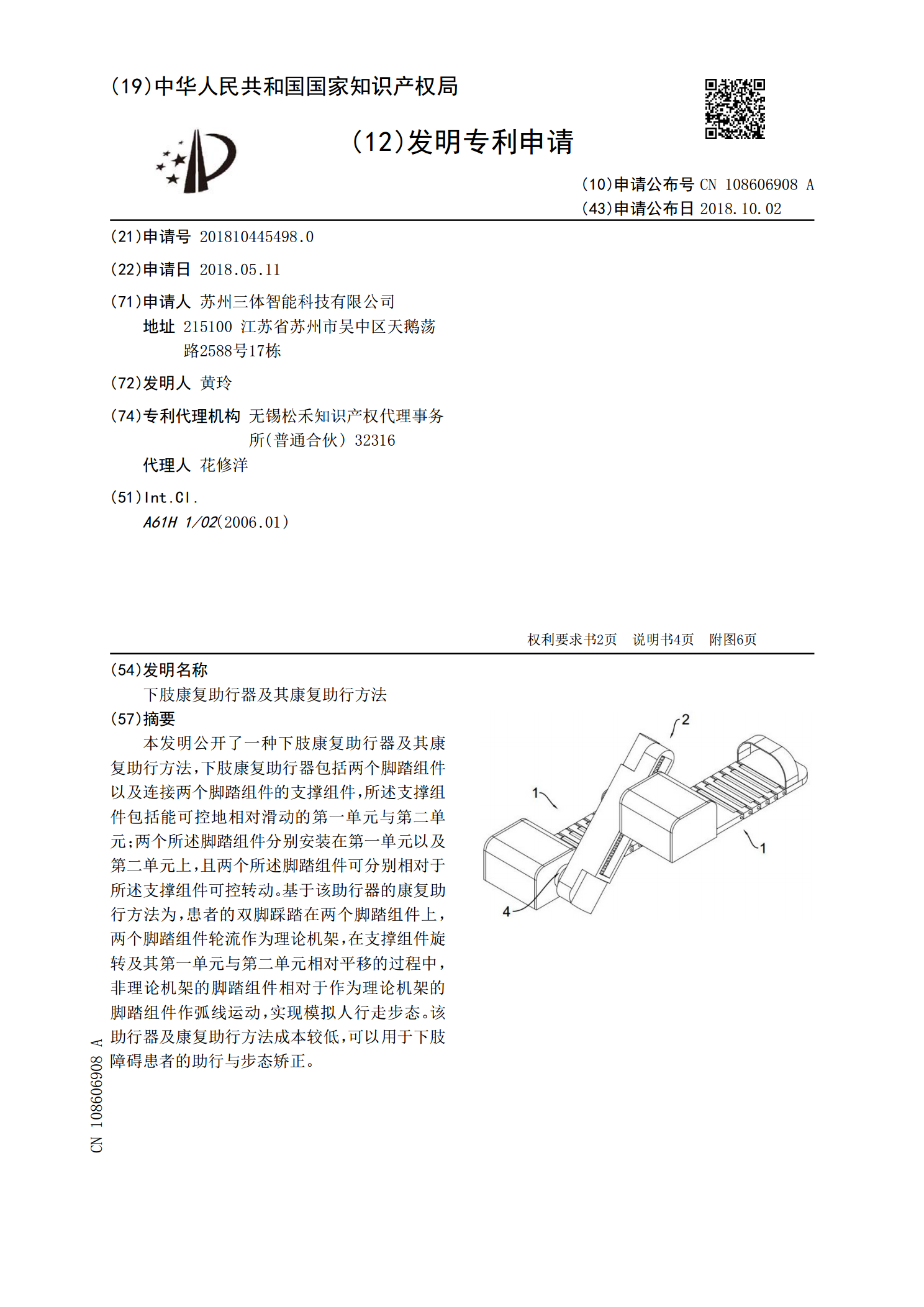
下肢康复助行器及其康复助行方法.pdf
本发明公开了一种下肢康复助行器及其康复助行方法,下肢康复助行器包括两个脚踏组件以及连接两个脚踏组件的支撑组件,所述支撑组件包括能可控地相对滑动的第一单元与第二单元;两个所述脚踏组件分别安装在第一单元以及第二单元上,且两个所述脚踏组件可分别相对于所述支撑组件可控转动。基于该助行器的康复助行方法为,患者的双脚踩踏在两个脚踏组件上,两个脚踏组件轮流作为理论机架,在支撑组件旋转及其第一单元与第二单元相对平移的过程中,非理论机架的脚踏组件相对于作为理论机架的脚踏组件作弧线运动,实现模拟人行走步态。该助行器及康复助行