
一种辅助手臂康复的机器人.pdf

是你****岺呀


1/8

2/8
3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种辅助手臂康复的机器人.pdf
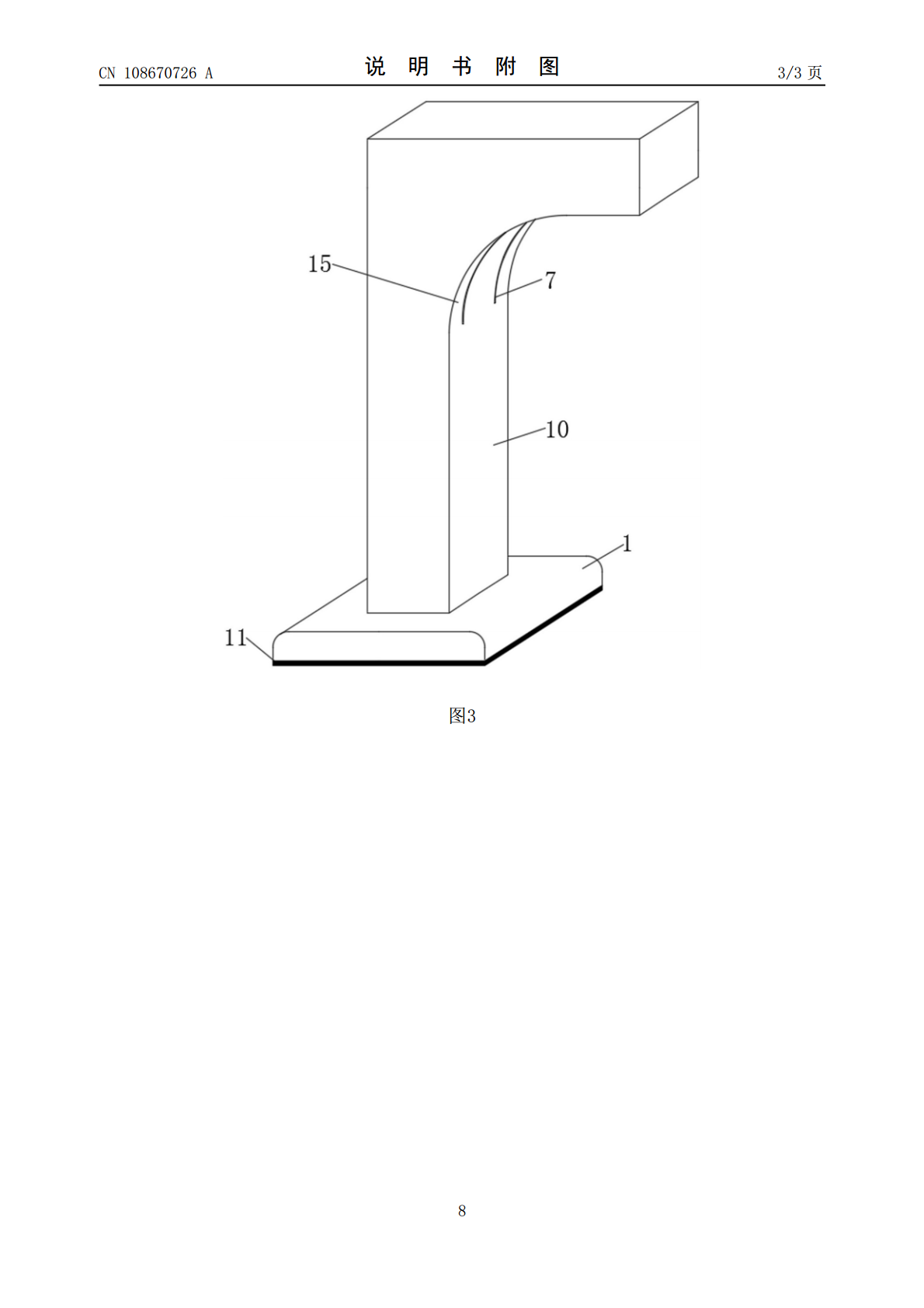
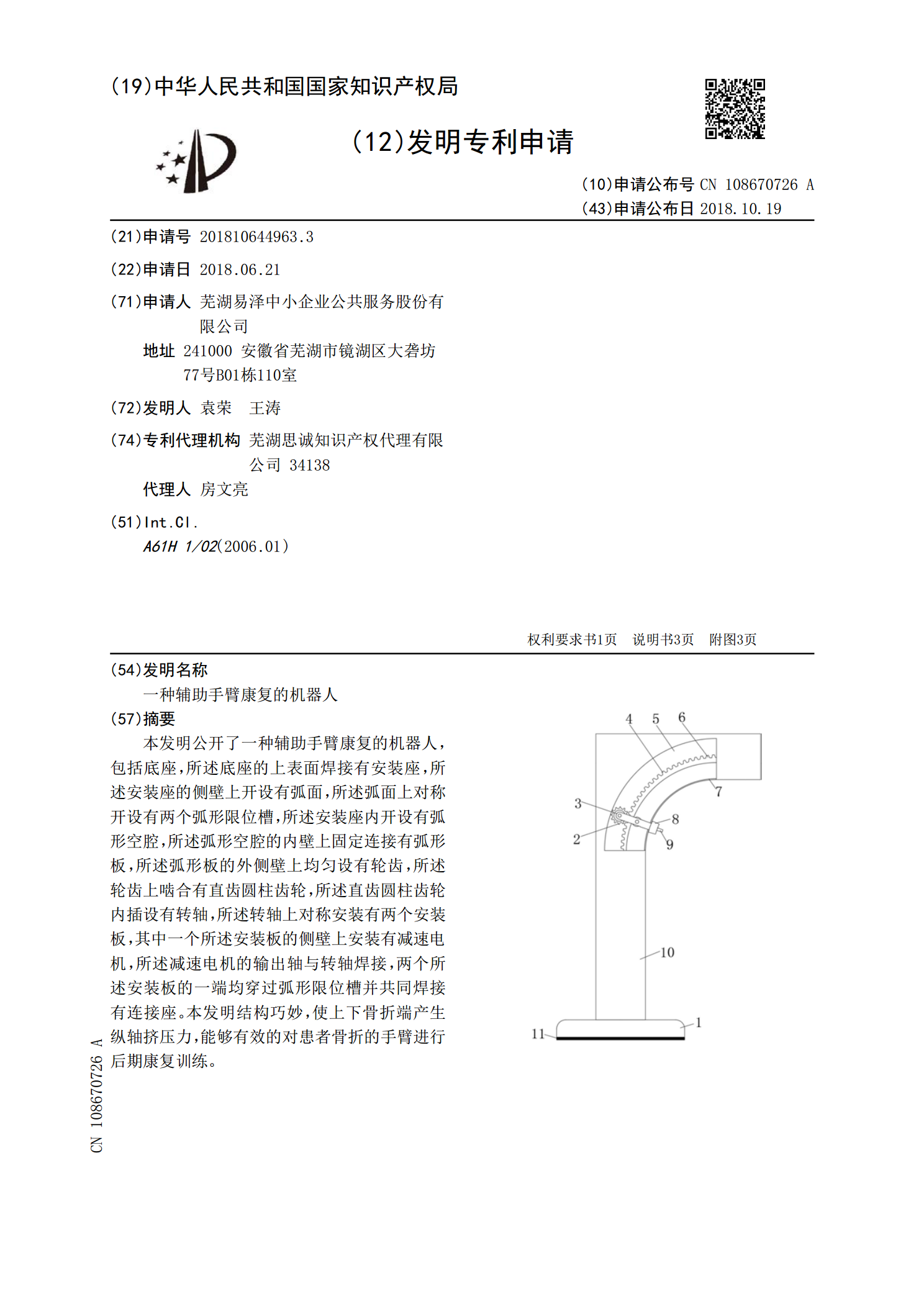
本发明公开了一种辅助手臂康复的机器人,包括底座,所述底座的上表面焊接有安装座,所述安装座的侧壁上开设有弧面,所述弧面上对称开设有两个弧形限位槽,所述安装座内开设有弧形空腔,所述弧形空腔的内壁上固定连接有弧形板,所述弧形板的外侧壁上均匀设有轮齿,所述轮齿上啮合有直齿圆柱齿轮,所述直齿圆柱齿轮内插设有转轴,所述转轴上对称安装有两个安装板,其中一个所述安装板的侧壁上安装有减速电机,所述减速电机的输出轴与转轴焊接,两个所述安装板的一端均穿过弧形限位槽并共同焊接有连接座。本发明结构巧妙,使上下骨折端产生纵轴挤压力,
一种运动员手臂康复用辅助设备.pdf
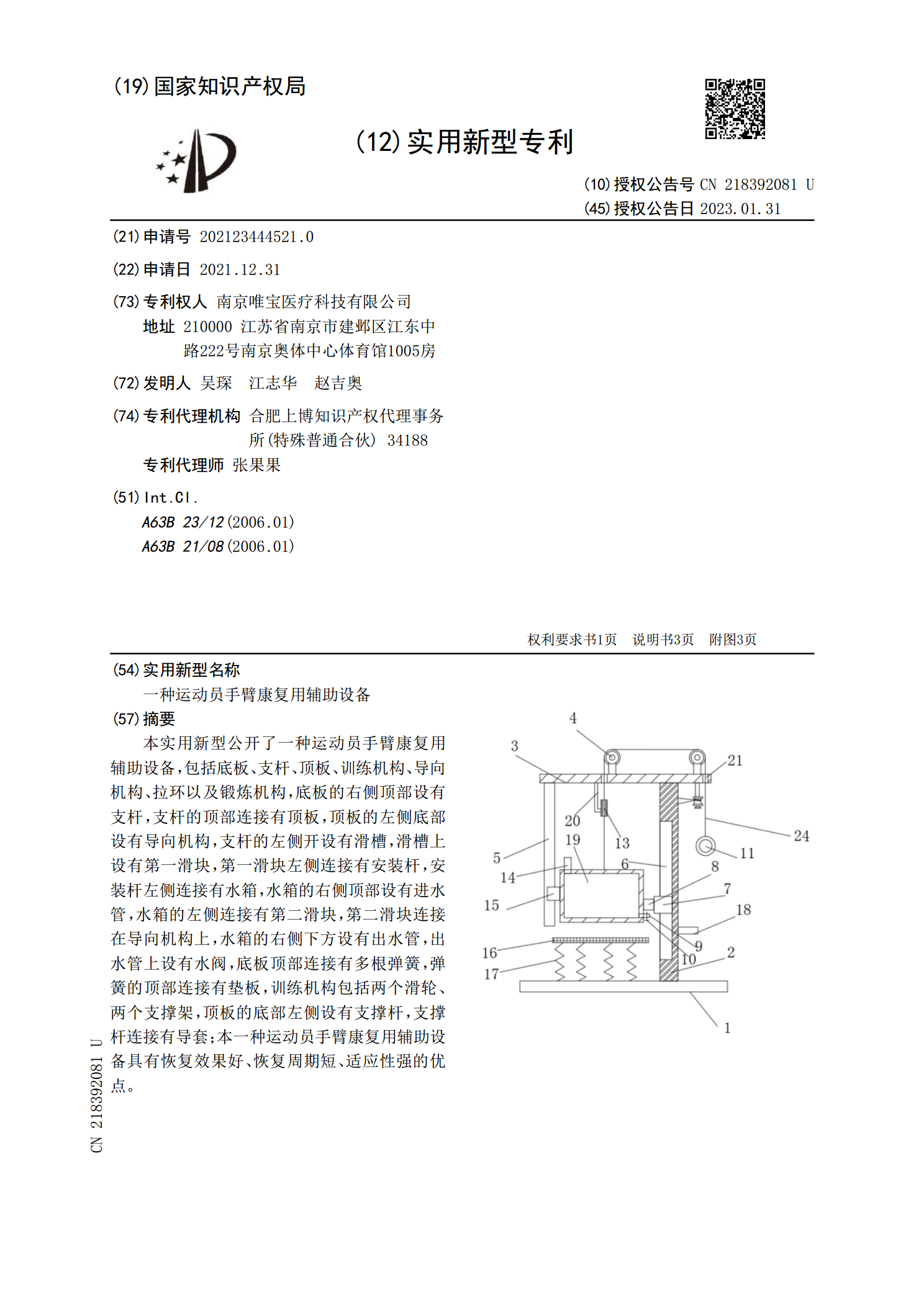
本实用新型公开了一种运动员手臂康复用辅助设备,包括底板、支杆、顶板、训练机构、导向机构、拉环以及锻炼机构,底板的右侧顶部设有支杆,支杆的顶部连接有顶板,顶板的左侧底部设有导向机构,支杆的左侧开设有滑槽,滑槽上设有第一滑块,第一滑块左侧连接有安装杆,安装杆左侧连接有水箱,水箱的右侧顶部设有进水管,水箱的左侧连接有第二滑块,第二滑块连接在导向机构上,水箱的右侧下方设有出水管,出水管上设有水阀,底板顶部连接有多根弹簧,弹簧的顶部连接有垫板,训练机构包括两个滑轮、两个支撑架,顶板的底部左侧设有支撑杆,支撑杆连接有
一种可穿戴式辅助手臂康复机.pdf
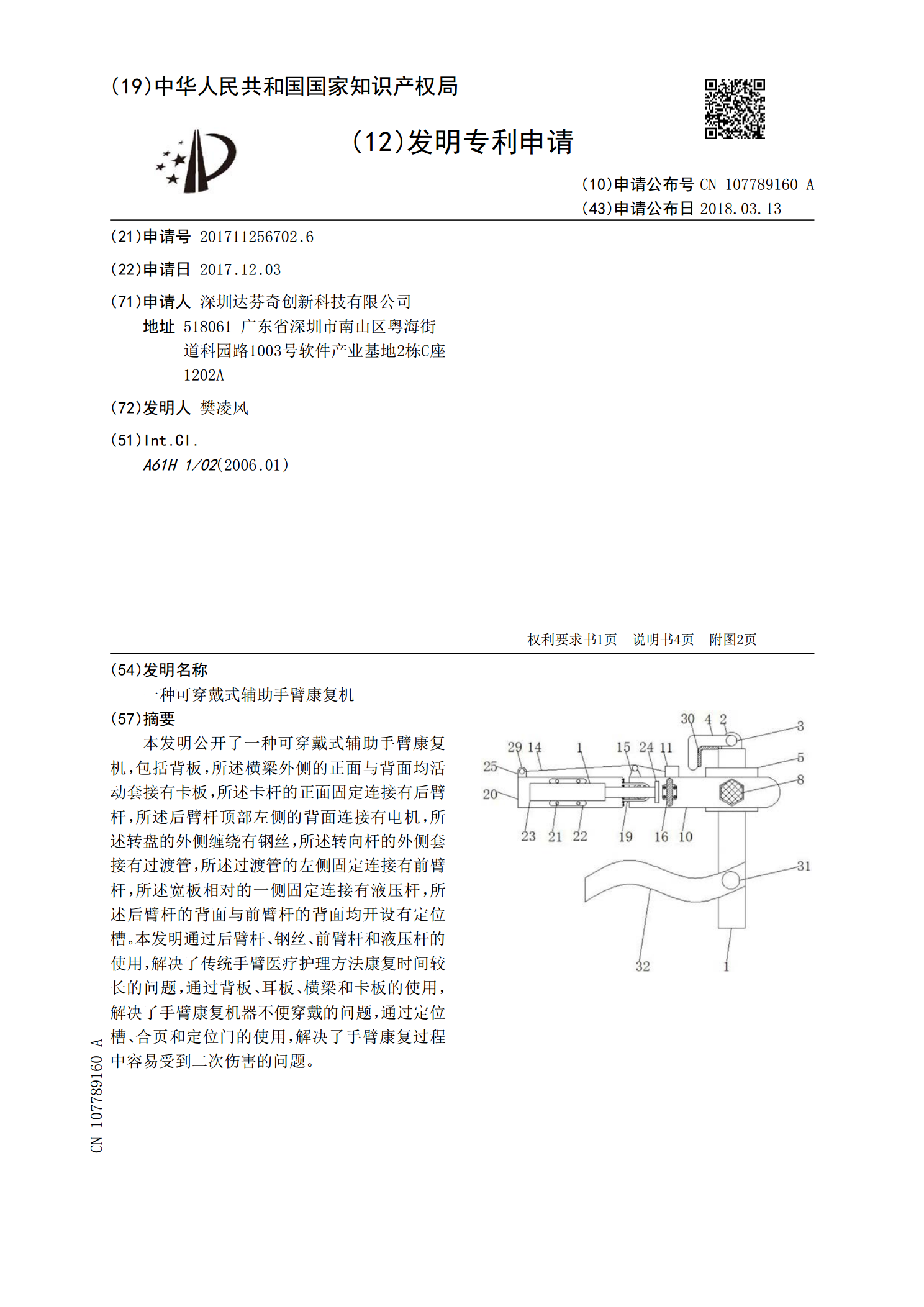
本发明公开了一种可穿戴式辅助手臂康复机,包括背板,所述横梁外侧的正面与背面均活动套接有卡板,所述卡杆的正面固定连接有后臂杆,所述后臂杆顶部左侧的背面连接有电机,所述转盘的外侧缠绕有钢丝,所述转向杆的外侧套接有过渡管,所述过渡管的左侧固定连接有前臂杆,所述宽板相对的一侧固定连接有液压杆,所述后臂杆的背面与前臂杆的背面均开设有定位槽。本发明通过后臂杆、钢丝、前臂杆和液压杆的使用,解决了传统手臂医疗护理方法康复时间较长的问题,通过背板、耳板、横梁和卡板的使用,解决了手臂康复机器不便穿戴的问题,通过定位槽、合页和
一种康复科用手臂辅助锻炼设备.pdf
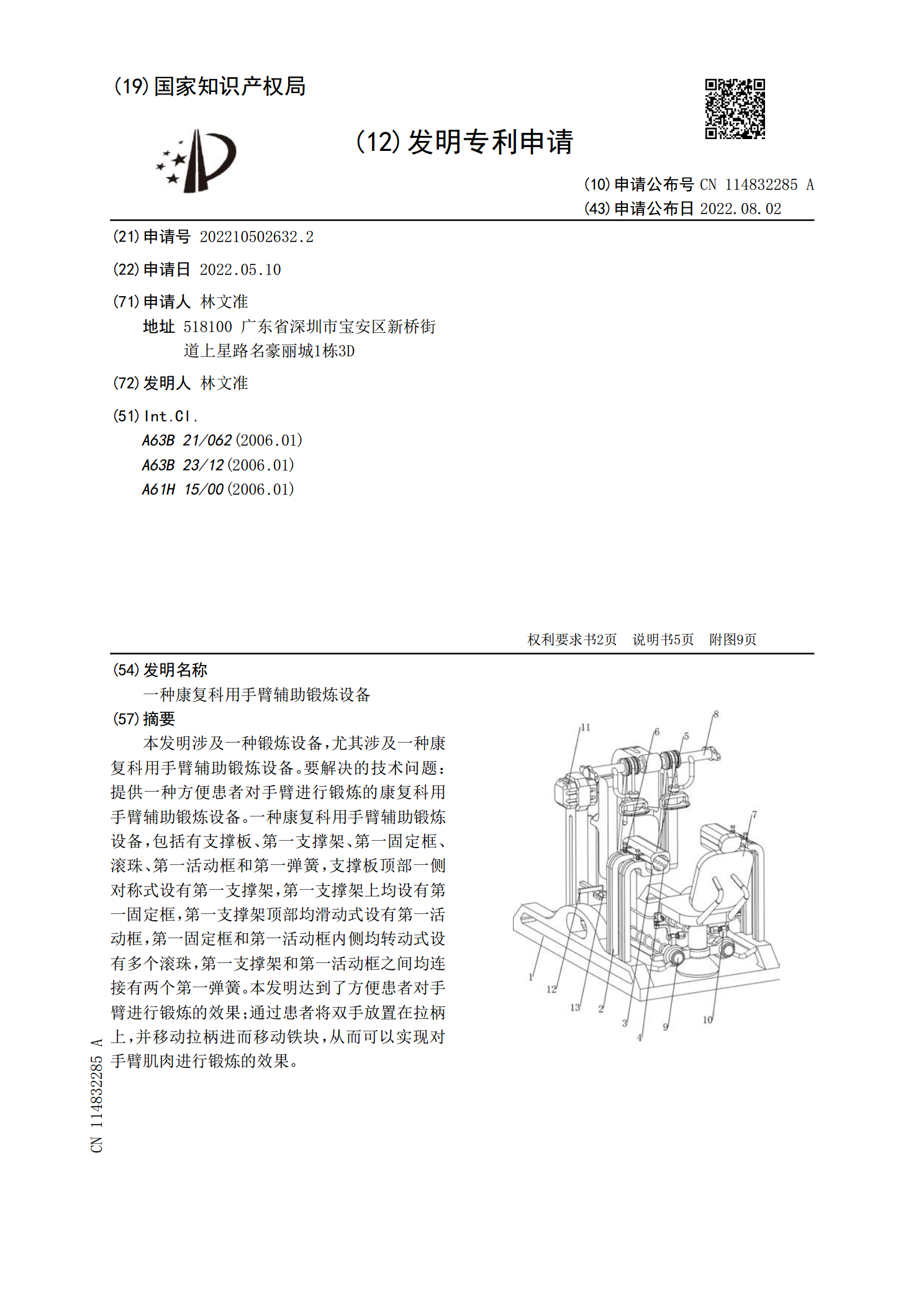
本发明涉及一种锻炼设备,尤其涉及一种康复科用手臂辅助锻炼设备。要解决的技术问题:提供一种方便患者对手臂进行锻炼的康复科用手臂辅助锻炼设备。一种康复科用手臂辅助锻炼设备,包括有支撑板、第一支撑架、第一固定框、滚珠、第一活动框和第一弹簧,支撑板顶部一侧对称式设有第一支撑架,第一支撑架上均设有第一固定框,第一支撑架顶部均滑动式设有第一活动框,第一固定框和第一活动框内侧均转动式设有多个滚珠,第一支撑架和第一活动框之间均连接有两个第一弹簧。本发明达到了方便患者对手臂进行锻炼的效果;通过患者将双手放置在拉柄上,并移动

一种康复机器人手臂重力平衡装置.pdf
本发明公开了一种康复机器人手臂的重力平衡装置,属于康复机器人领域,包括:肩关节连接件、大臂连接件和重力平衡组件;肩关节连接件和大臂连接件按照人体仿生学结构可枢转地连接,以模拟人体大臂绕肩关节的旋转运动;重力平衡组件包括多个弹簧、钢丝绳及导向轮,钢丝绳将弹簧与肩关节连接件和大臂连接件连接,弹簧拉力用于平衡手臂的重力,导轮用于改变钢丝绳力的方向,可节省空间,使装置结构更紧凑,此外,通过锁死不同的导向轮可以实现在康复机器人左右手训练模式切换之后弹簧拉力仍可以平衡手臂重力,从而保证机器人在切换训练模式后仍能正常使