
ABB机器人基本指令YD.ppt

天马****23


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共47页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

ABB机器人基本指令YD.ppt
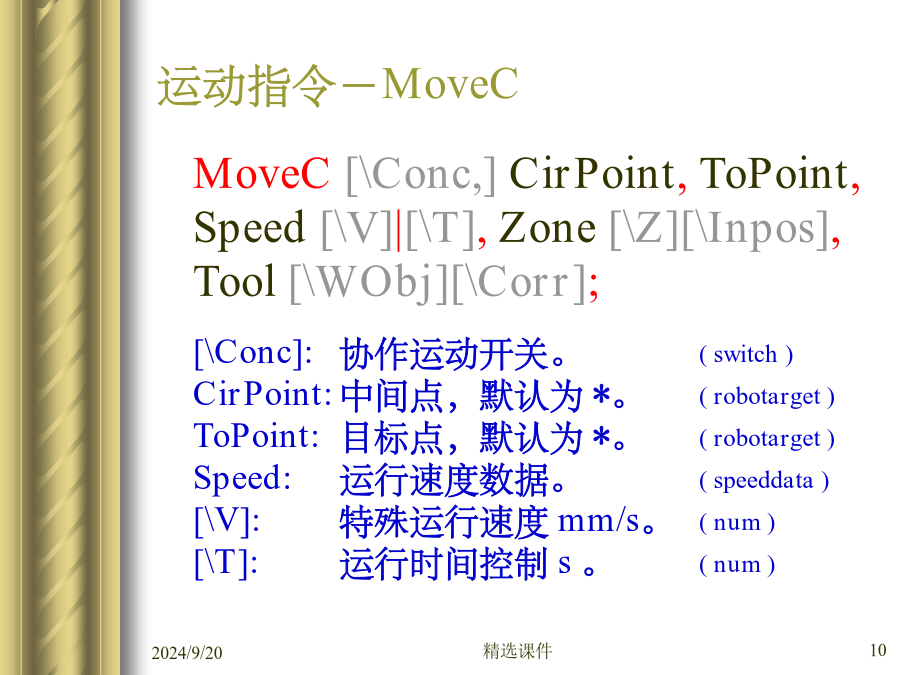
ABB机器人基本指令运动指令-MoveJ运动指令-MoveJ运动指令-MoveJ运动指令-MoveJ运动指令-MoveL运动指令-MoveL运动指令-MoveL运动指令-MoveL运动指令-MoveC运动指令-MoveC运动指令-MoveC运动指令-MoveC运动控制指令-AccSet运动控制指令-AccSet运动控制指令-VelSet运动控制指令-VelSet运动控制指令-VelSet计数指令-Add计数指令-Clear计数指令-Incr计数指令-Decr输入输出指令-PulseDO输入输出指令-Pul

ABB机器人-编程基本指令之运动指令.doc
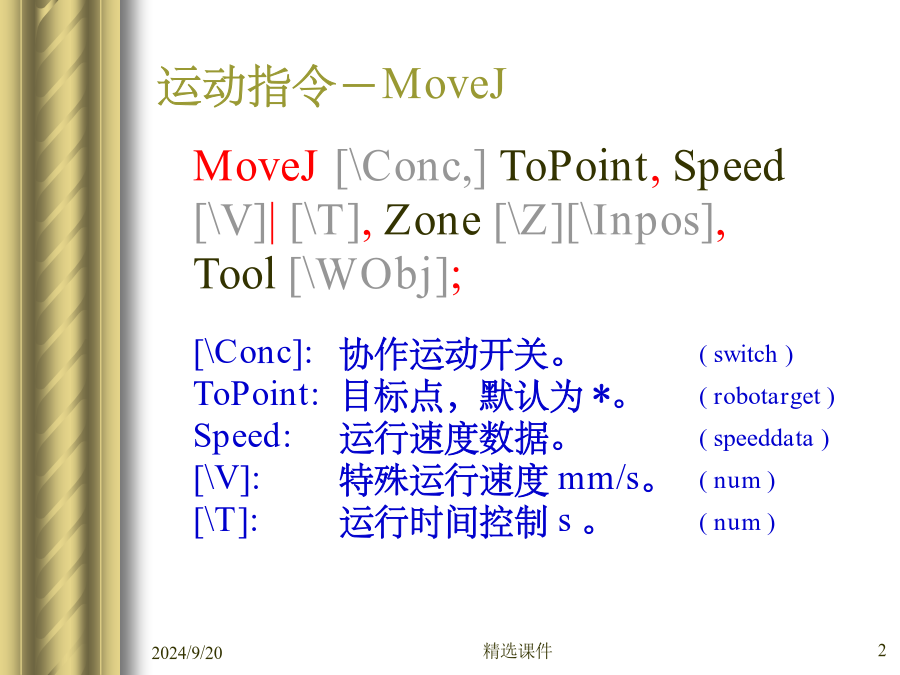
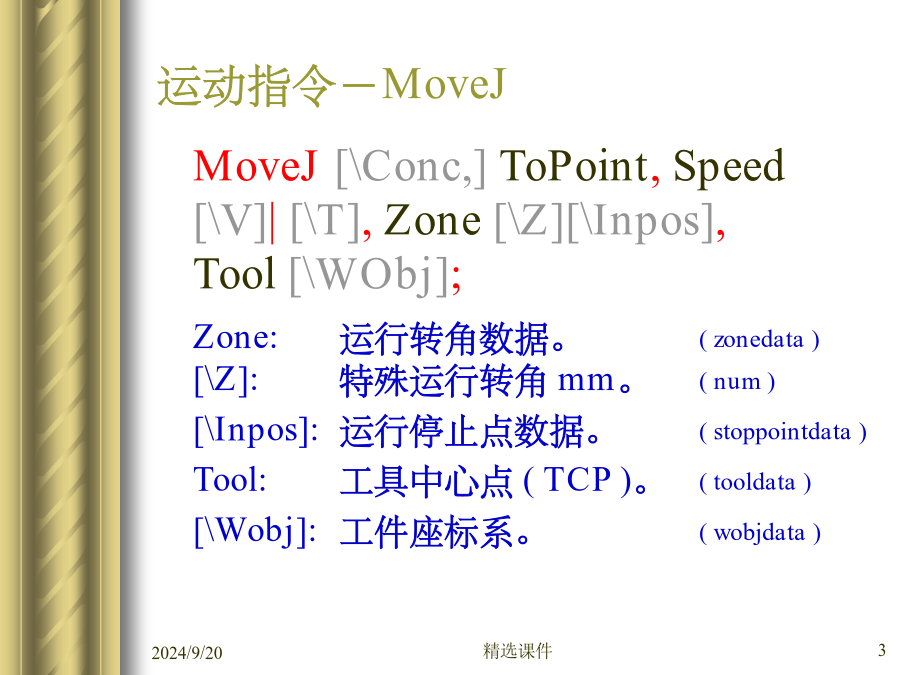
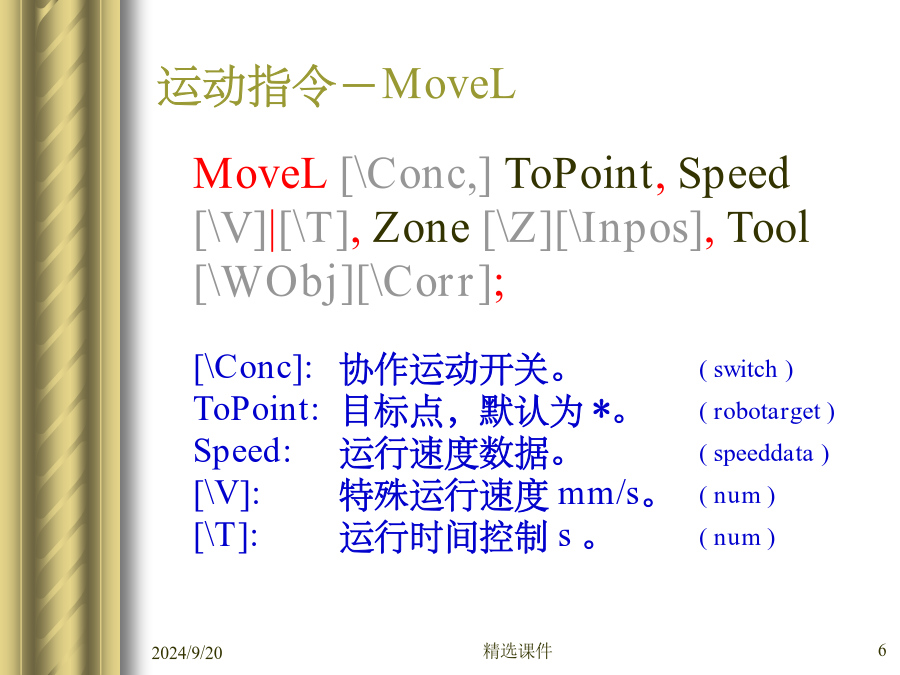
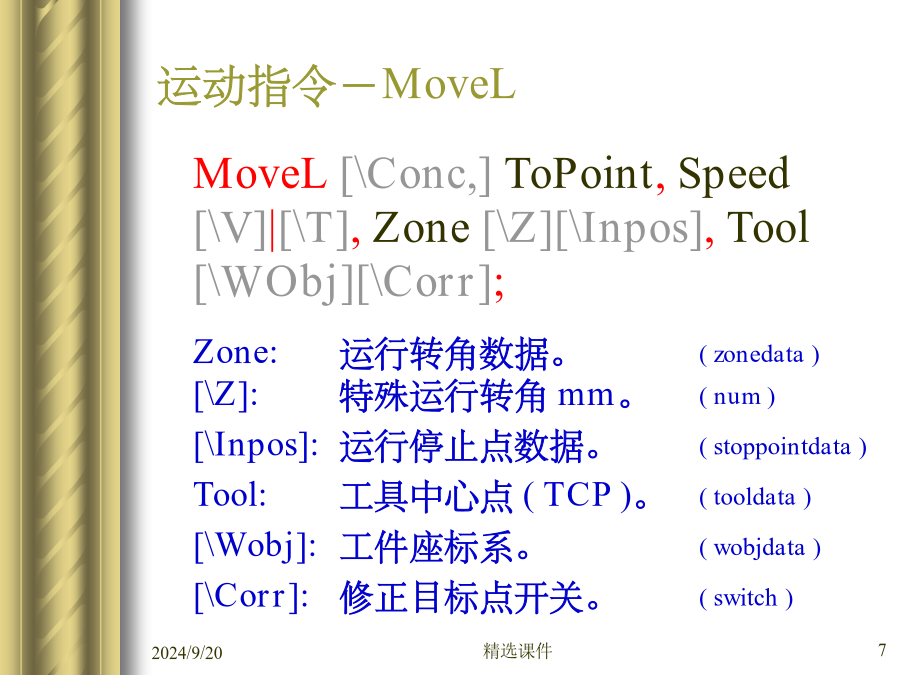
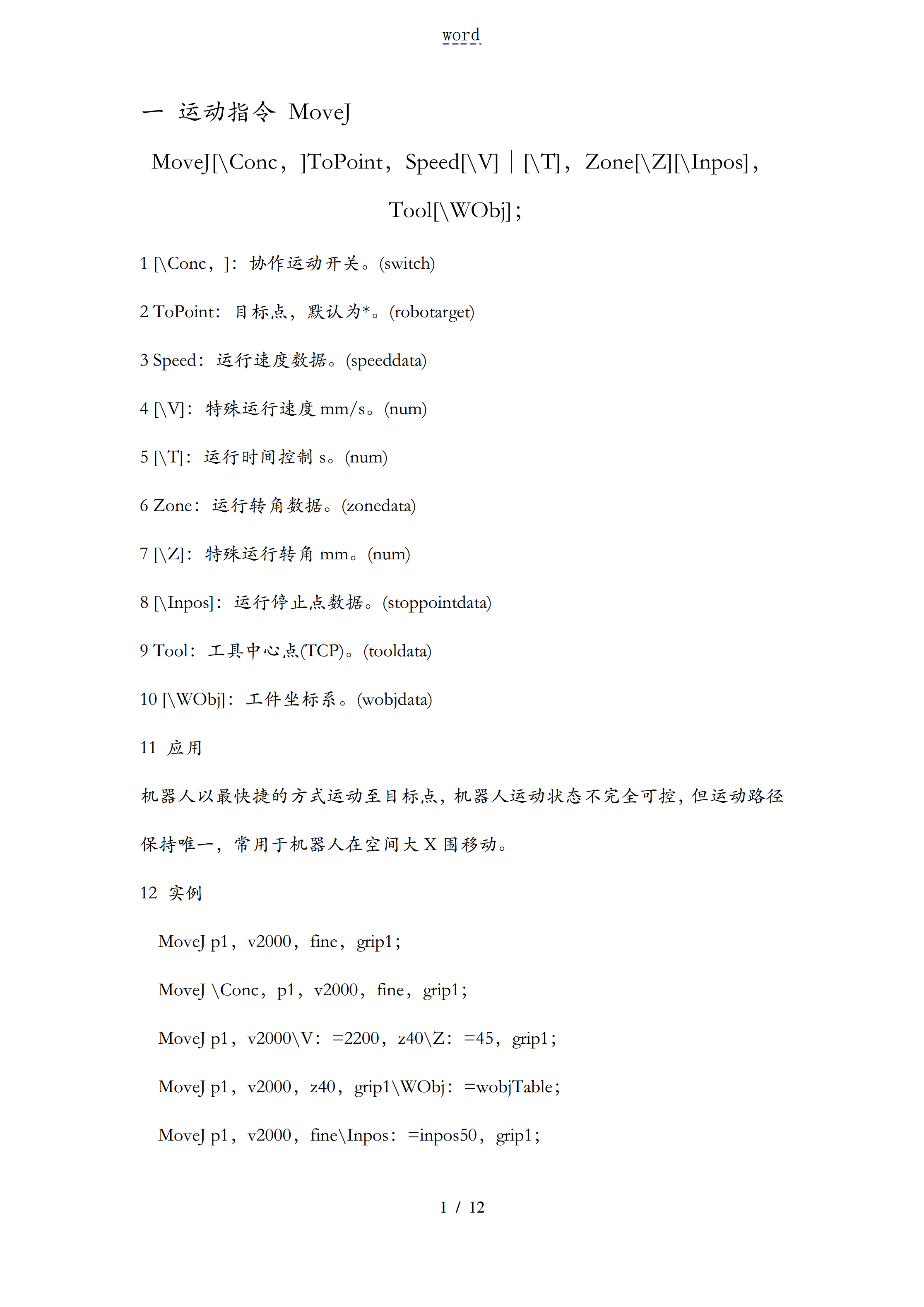
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行停止点数
ABB机器人~编程基本指令之运动指令.pdf
word一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行

ABB机器人-编程基本指令之运动指令.doc
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行停止点数

ABB机器人标准指令详解.ppt
机器人标准指令赋值指令运动控制指令外轴激活指令计数指令输入输出指令程序运行停止指令例行程序调用指令计时指令中断指令通信指令运动指令中断运动指令程序流程指令故障处理指令座标转换指令运动触发指令运动控制指令运动控制指令-AccSet运动控制指令-AccSet运动控制指令-VelSet运动控制指令-VelSet运动控制指令-VelSet运动控制指令-ConfJ运动控制指令-ConfJ运动控制指令-ConfL运动控制指令-ConfL运动控制指令-SingArea运动控制指令-SingArea运动控制指令-Sing