
ABB机器人-编程基本指令之运动指令.doc

你的****书屋


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
ABB机器人~编程基本指令之运动指令.pdf
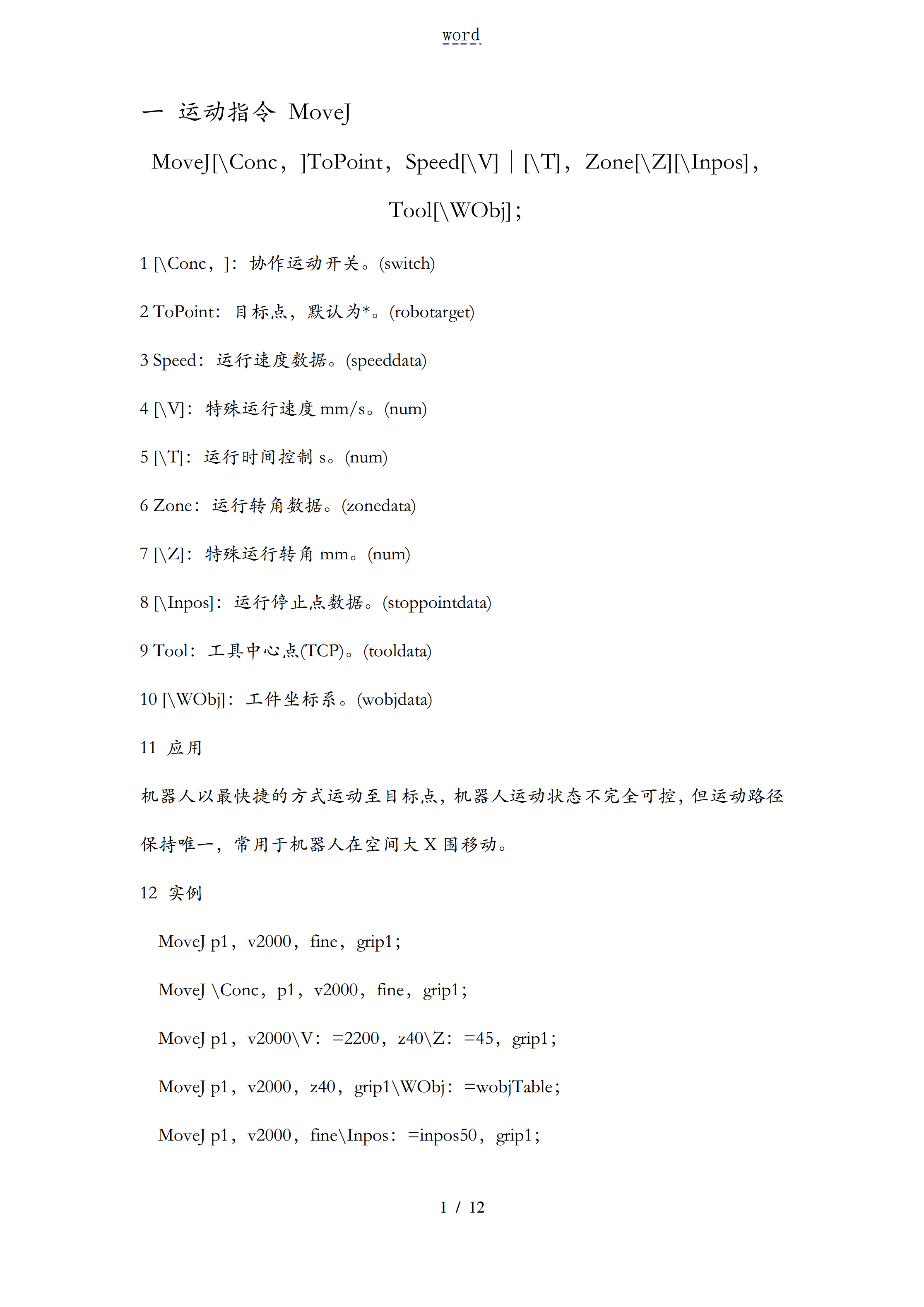
word一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行

ABB机器人-编程基本指令之运动指令.doc
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行停止点数

ABB机器人-编程基本指令之运动指令.doc
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1[\Conc,]:协作运动开关。(switch)2ToPoint:目标点,默认为*。(robotarget)3Speed:运行速度数据。(speeddata)4[\V]:特殊运行速度mm/s。(num)5[\T]:运行时间控制s。(num)6Zone:运行转角数据。(zonedata)7[\Z]:特殊运行转角mm。(num)8[\Inpos]:运行停止点数
ABB机器人高级编程指令.ppt
ABB機器人高級指令目錄運動控制指令運動控制指令-AccSet運動控制指令-AccSet運動控制指令-VelSet運動控制指令-VelSet運動控制指令-VelSet運動控制指令-ConfJ運動控制指令-ConfJ運動控制指令-ConfL運動控制指令-ConfL運動控制指令-SingArea運動控制指令-SingArea運動控制指令-SingArea運動控制指令-PathResol運動控制指令-PathResol運動控制指令-PathResol運動控制指令-SoftAct運動控制指令-SoftAct運動控

ABB机器人基本指令YD.ppt
ABB机器人基本指令运动指令-MoveJ运动指令-MoveJ运动指令-MoveJ运动指令-MoveJ运动指令-MoveL运动指令-MoveL运动指令-MoveL运动指令-MoveL运动指令-MoveC运动指令-MoveC运动指令-MoveC运动指令-MoveC运动控制指令-AccSet运动控制指令-AccSet运动控制指令-VelSet运动控制指令-VelSet运动控制指令-VelSet计数指令-Add计数指令-Clear计数指令-Incr计数指令-Decr输入输出指令-PulseDO输入输出指令-Pul