
基于红外检测的四旋翼飞行避障算法研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于红外检测的四旋翼飞行避障算法研究的开题报告.docx
基于红外检测的四旋翼飞行避障算法研究的开题报告一、研究背景与意义近年来,随着四旋翼飞行器的广泛应用,飞行器的自主避障技术也变得越来越重要。基于红外检测的四旋翼飞行避障算法是一种常用的方法,它可以通过感知四周的环境信息来避免与障碍物发生碰撞。本研究的主要目的是设计和实现一种基于红外检测的四旋翼飞行避障算法,该算法可以实现对飞行器周围障碍物的感知,并通过对感知结果的处理和分析,实现四旋翼飞行器的自主避障。本研究的意义在于提高四旋翼飞行器的安全性和可靠性,减少飞行器与障碍物之间的碰撞,防止飞行器在飞行过程中发生

基于改进人工势场法的旋翼飞行器的避障研究的开题报告.docx
基于改进人工势场法的旋翼飞行器的避障研究的开题报告一、研究背景随着无人飞行器的广泛应用,旋翼飞行器作为其中的重要角色,在各种任务中的运用越来越受到重视。然而,旋翼飞行器在飞行过程中不可避免地会遇到各种各样的障碍物,如建筑物、电线杆、树木等等。如何实现有效的避障能力是提高旋翼飞行器的安全性、功能性和应用范围的关键。传统的避障方法包括基于激光雷达、视觉传感器等设备的避障技术。但是,这些技术通常需要高昂的成本和复杂的设备,同时依赖于环境的条件,限制其稳定性和可靠性。因此,人工势场法成为另一种研究避障问题的有效方

基于四旋翼飞行器的姿态控制算法研究的开题报告.docx
基于四旋翼飞行器的姿态控制算法研究的开题报告一、选题背景分析随着机器人技术的不断更新与进步,四旋翼飞行器逐渐成为人们关注的热点之一。四旋翼飞行器因其小巧灵活、可操作性强、搭载载荷重量小等优点,被广泛应用于农业、资源勘探、环境监测、地质探测等领域。而四旋翼飞行器的核心部分——姿态控制系统的研究成为越来越多学者的研究热点之一。四旋翼飞行器姿态控制是指控制飞行器在三维空间内的姿态,使其按照预先设定的运动轨迹进行飞行。姿态控制的主要目的在于稳定飞行器,提高其飞行的精度和安全性。对于四旋翼飞行器而言,姿态控制涉及到
基于布谷鸟算法改进人工势场法的四旋翼编队避障方法.pdf
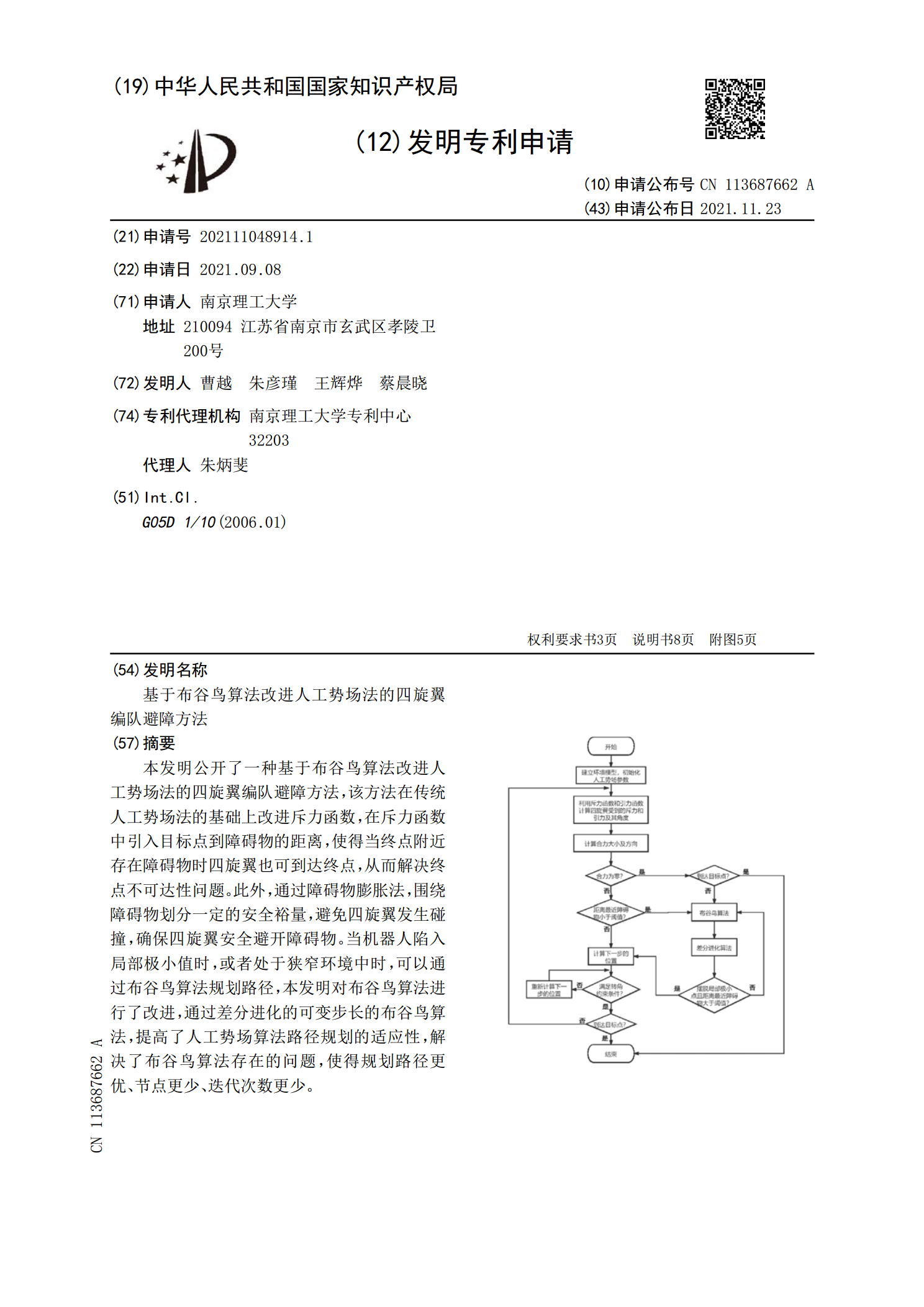
本发明公开了一种基于布谷鸟算法改进人工势场法的四旋翼编队避障方法,该方法在传统人工势场法的基础上改进斥力函数,在斥力函数中引入目标点到障碍物的距离,使得当终点附近存在障碍物时四旋翼也可到达终点,从而解决终点不可达性问题。此外,通过障碍物膨胀法,围绕障碍物划分一定的安全裕量,避免四旋翼发生碰撞,确保四旋翼安全避开障碍物。当机器人陷入局部极小值时,或者处于狭窄环境中时,可以通过布谷鸟算法规划路径,本发明对布谷鸟算法进行了改进,通过差分进化的可变步长的布谷鸟算法,提高了人工势场算法路径规划的适应性,解决了布谷鸟

四旋翼飞行器控制算法设计与研究的中期报告.docx
四旋翼飞行器控制算法设计与研究的中期报告中期报告一、研究背景与意义随着无人飞行器技术的不断发展,四旋翼飞行器已成为非常重要的飞行器类型之一。四旋翼飞行器的结构简单,重量轻,操控灵活,适应性强,可进行垂直起降等特点,使其在航拍、物流、搜救等领域得到广泛应用。四旋翼飞行器的关键技术之一是控制算法设计。合理的控制算法可以保证飞行器的稳定性,提高其精度和可靠性,同时提升飞行效率和安全性。因此,本研究旨在设计一种适用于四旋翼飞行器的控制算法,提高其飞行性能和控制精度,提高飞行器在实际应用中的可靠性和效果。二、研究方