
基于布谷鸟算法改进人工势场法的四旋翼编队避障方法.pdf

霞英****娘子

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于布谷鸟算法改进人工势场法的四旋翼编队避障方法.pdf
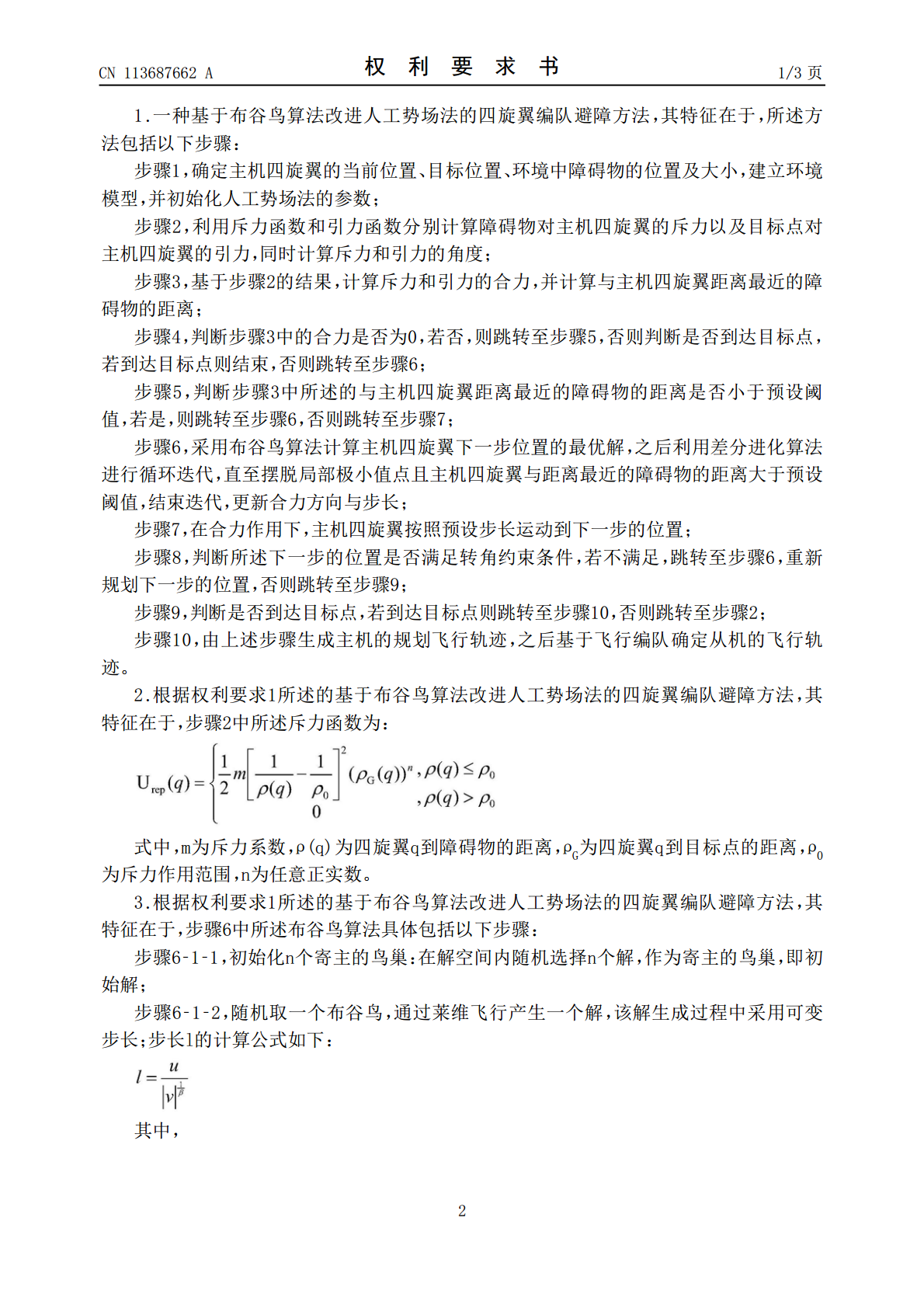
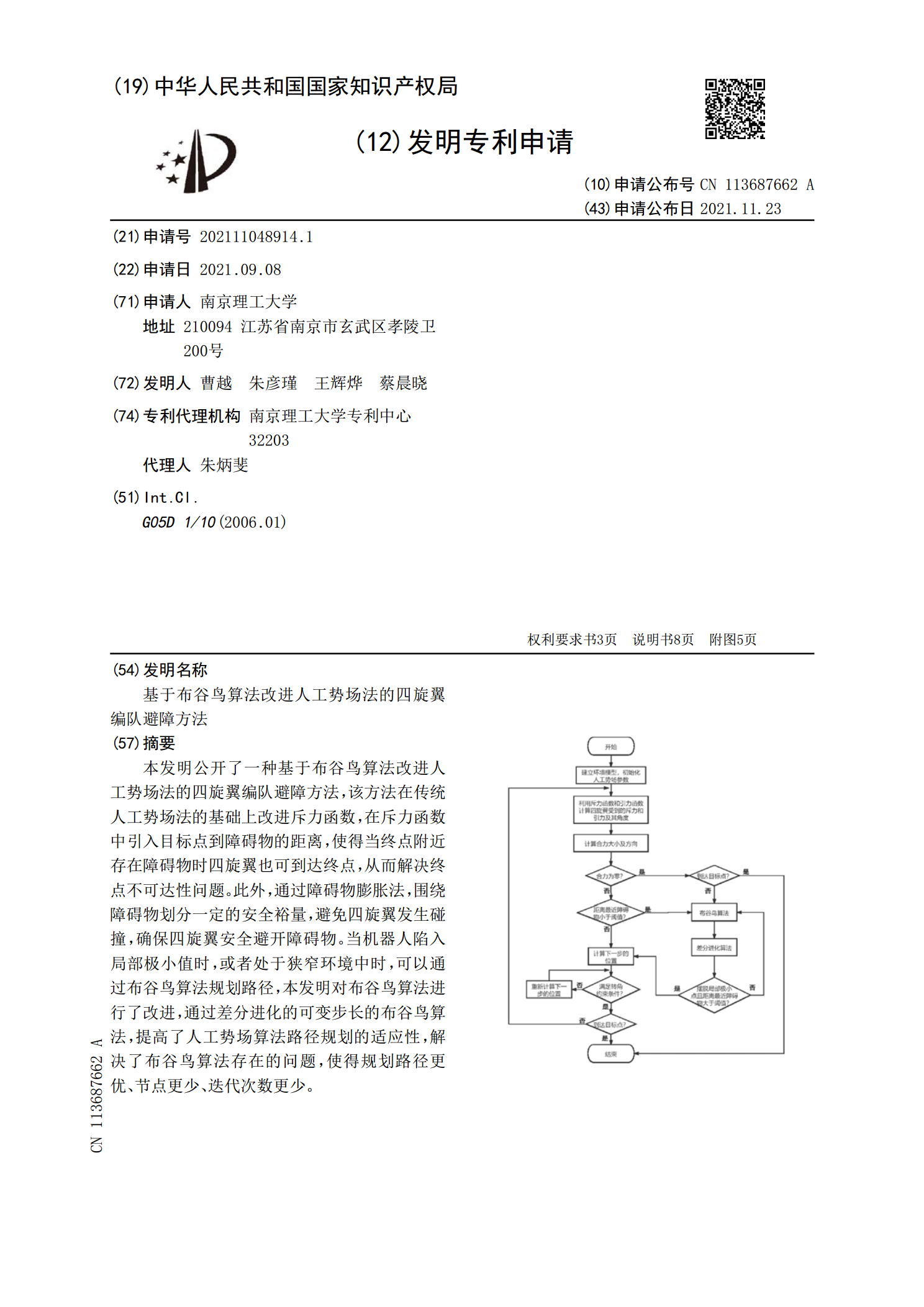
本发明公开了一种基于布谷鸟算法改进人工势场法的四旋翼编队避障方法,该方法在传统人工势场法的基础上改进斥力函数,在斥力函数中引入目标点到障碍物的距离,使得当终点附近存在障碍物时四旋翼也可到达终点,从而解决终点不可达性问题。此外,通过障碍物膨胀法,围绕障碍物划分一定的安全裕量,避免四旋翼发生碰撞,确保四旋翼安全避开障碍物。当机器人陷入局部极小值时,或者处于狭窄环境中时,可以通过布谷鸟算法规划路径,本发明对布谷鸟算法进行了改进,通过差分进化的可变步长的布谷鸟算法,提高了人工势场算法路径规划的适应性,解决了布谷鸟
基于改进人工势场方法的多无人机编队避障算法.pptx
,目录PartOnePartTwo人工势场方法的原理传统人工势场方法的局限性改进人工势场方法的必要性PartThree障碍物对无人机的斥力计算无人机之间的引力计算斥力和引力的平衡与优化无人机编队避障的路径规划PartFour无人机编队系统的构建改进人工势场方法在避障中的应用算法的实时性优化算法的鲁棒性验证PartFive实验场景与条件实验结果展示结果分析与其他算法的比较PartSix基于改进人工势场方法的多无人机编队避障算法的优势与不足在实际应用中的潜在价值对未来研究的展望THANKS

基于改进人工势场法的旋翼飞行器的避障研究的开题报告.docx
基于改进人工势场法的旋翼飞行器的避障研究的开题报告一、研究背景随着无人飞行器的广泛应用,旋翼飞行器作为其中的重要角色,在各种任务中的运用越来越受到重视。然而,旋翼飞行器在飞行过程中不可避免地会遇到各种各样的障碍物,如建筑物、电线杆、树木等等。如何实现有效的避障能力是提高旋翼飞行器的安全性、功能性和应用范围的关键。传统的避障方法包括基于激光雷达、视觉传感器等设备的避障技术。但是,这些技术通常需要高昂的成本和复杂的设备,同时依赖于环境的条件,限制其稳定性和可靠性。因此,人工势场法成为另一种研究避障问题的有效方

基于改进人工势场的无人机编队避障.docx
基于改进人工势场的无人机编队避障标题:基于改进人工势场的无人机编队避障摘要:随着无人机技术的快速发展,无人机编队的应用越来越广泛。在无人机编队飞行中,避障是一个重要的问题。本文基于改进的人工势场算法,在无人机编队中实现了优化的避障策略。首先,介绍了无人机编队避障的背景和意义;其次,概述了传统的人工势场算法及其局限性;然后,详细阐述了改进的人工势场算法的原理与步骤,并通过实验验证了其有效性与实用性;最后,对改进的人工势场算法在无人机编队避障中的应用前景进行了展望。关键词:无人机编队,避障,人工势场算法,改进

基于人工势场法的多智能体编队避障方法.docx
基于人工势场法的多智能体编队避障方法基于人工势场法的多智能体编队避障方法摘要:多智能体编队在无人系统领域起着重要的作用,并且随着技术的发展,越来越多的无人系统被用于各种应用场景中。然而,多智能体编队中的避障问题一直是一个挑战。本论文提出了一种基于人工势场法的多智能体编队避障方法,通过引入人工势场的概念来实现智能体之间的避障和编队控制。通过仿真实验验证了该方法的有效性和鲁棒性。关键词:多智能体编队,避障,人工势场法,控制,仿真实验1.引言多智能体编队是指协调多个无人系统进行协同工作,从而实现一定的任务目标。