
一种面向机动的低成本姿态测量系统.pdf

sy****28

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向机动的低成本姿态测量系统.pdf
第20卷第10期传感技术学报Vol.20No.102007年10月CHINESEJOURNALOFSENSORSANDACTUATORSOCT.2007LowCostAttitudeDeterminationSystemforAcceleratedRigidBodies3XUYu,LIPing3,HANBo(InstituteofIndustrialProcessControl,ZhejiangUniversity,Hangzhou310027,China)Abstract:Translationalac

低成本无人机姿态测量系统研究.docx
低成本无人机姿态测量系统研究摘要:近年来,无人机技术得到了广泛的应用和发展,而无人机姿态测量系统是实现无人机稳定飞行的重要组成部分。然而,传统的姿态测量系统通常昂贵且复杂,限制了无人机的普及和应用。为解决这一问题,本文针对低成本无人机姿态测量系统进行了研究。本文首先介绍了无人机姿态测量系统的基本原理和常见的传统测量方法。然后分析了传统系统的不足和局限性,包括高成本、复杂的硬件和软件需求等。接着,本文详细研究了低成本无人机姿态测量系统的设计和实现。在设计方面,本文提出了一种基于MEMS(微机电系统)传感器和
一种低成本的物体姿态监测系统及方法.pdf
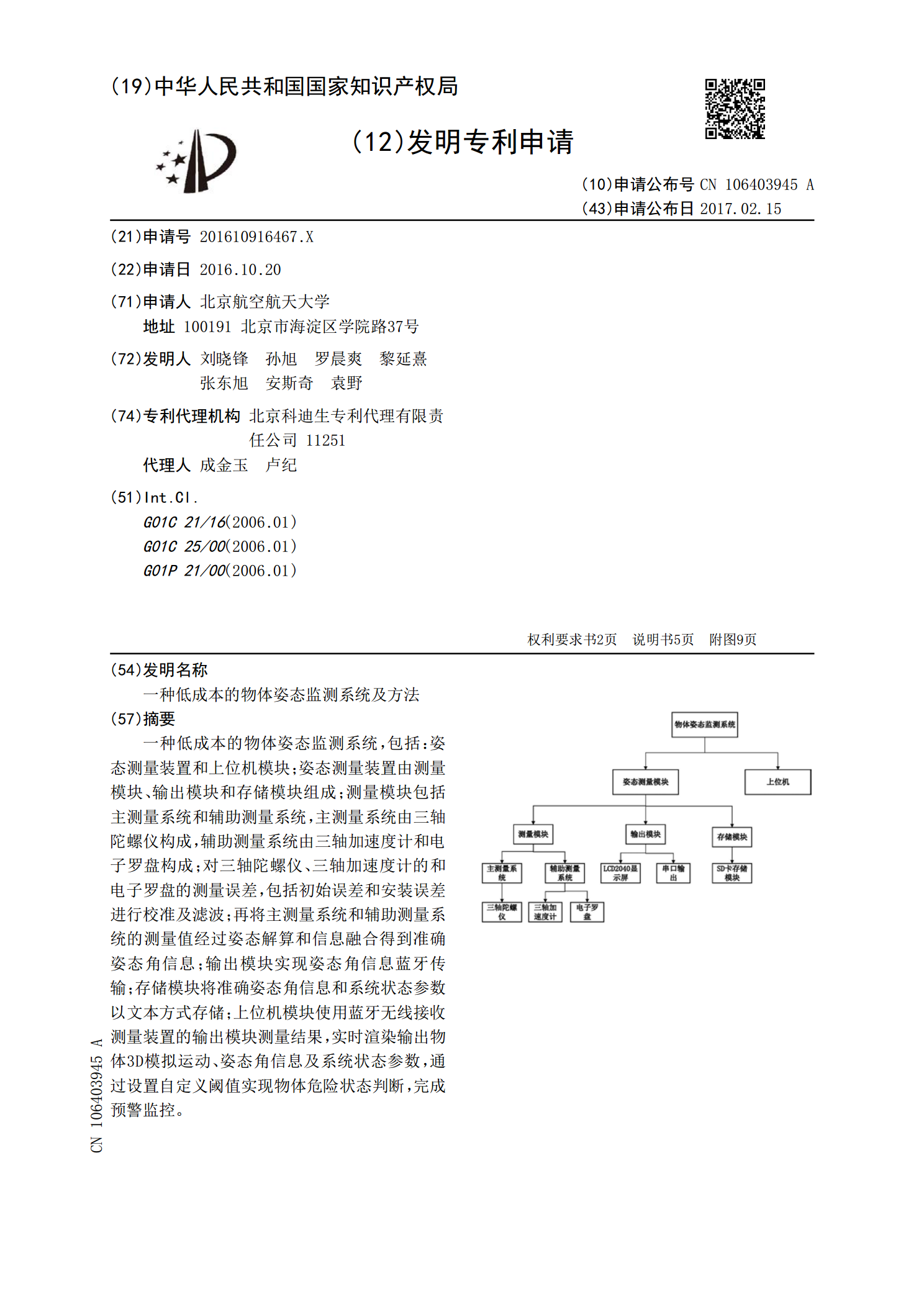
一种低成本的物体姿态监测系统,包括:姿态测量装置和上位机模块;姿态测量装置由测量模块、输出模块和存储模块组成;测量模块包括主测量系统和辅助测量系统,主测量系统由三轴陀螺仪构成,辅助测量系统由三轴加速度计和电子罗盘构成;对三轴陀螺仪、三轴加速度计的和电子罗盘的测量误差,包括初始误差和安装误差进行校准及滤波;再将主测量系统和辅助测量系统的测量值经过姿态解算和信息融合得到准确姿态角信息;输出模块实现姿态角信息蓝牙传输;存储模块将准确姿态角信息和系统状态参数以文本方式存储;上位机模块使用蓝牙无线接收测量装置的输出

一种机动车移动位置和姿态的精确测量方法.pdf
本发明公开了一种机动车移动位置和姿态的精确测量方法,包括有测量前的准备和实时测量步骤,测量前的准备包括有建立RTKGPS基准站、建立无线数据通信链路、绘制考试场地或考试道路电子地图、在机动车上安装车载检测设备和测量机动车轮廓关键点的相对坐标;实时测量包括测量计算机动车在考试场地或考试道路电子地图上的精确三维位置坐标、姿态角以及与其它各种标志、标线和静态物体的位置关系。本发明无需在考试场地或考试道路上设置测量设备,测量时直接采用车载检测设备与基准站的通讯实现检测,降低了机动车位置和姿态检测设备使用时的运营成

一种姿态测量系统的FPGA硬件实现方法.pdf
针对现有的基于铅垂陀螺和CCD线阵的姿态可视化测量系统中铅垂陀螺的进动现象将会直接导致姿态角测量错误的问题,本发明提出了一种姿态测量系统的FPGA硬件实现方法,该方法通过合理地配置姿态可视化测量系统的机械结构,使得加速度引起的铅垂陀螺进动现象得以消除,考虑到实际中可能存在的加工误差,进一步给出了铅垂陀螺的进动运动对姿态测量的影响及基于FPGA平台的补偿办法,本发明有效解决了现有的基于铅垂陀螺和CCD线阵的姿态可视化测量系统中铅垂陀螺的进动现象将会直接导致姿态角测量错误的技术问题,这种测量方法在飞机盲降、无