
一种可变足迹的全向移动运载车.pdf

论文****可爱


1/9
2/9

3/9

4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可变足迹的全向移动运载车.pdf
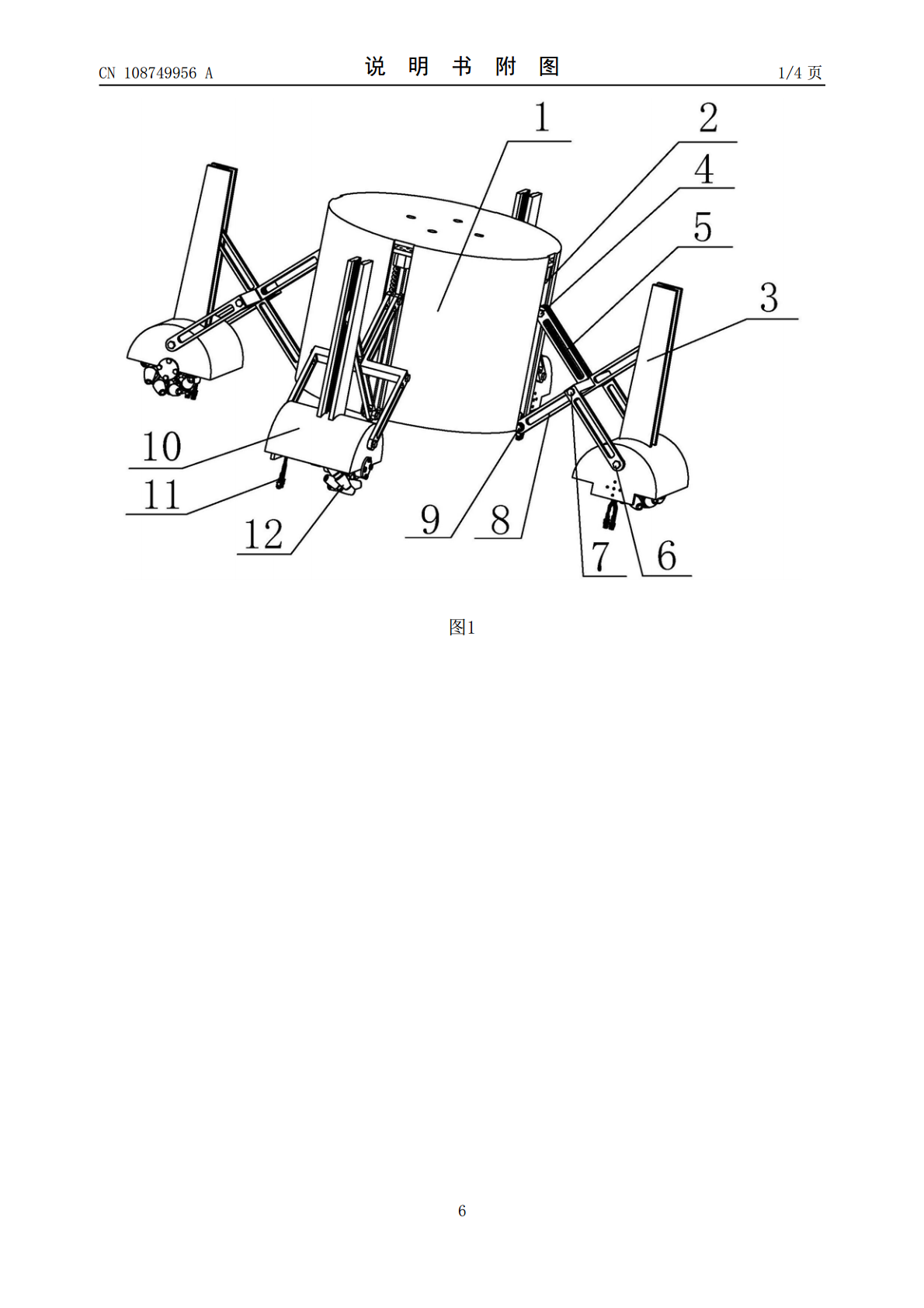
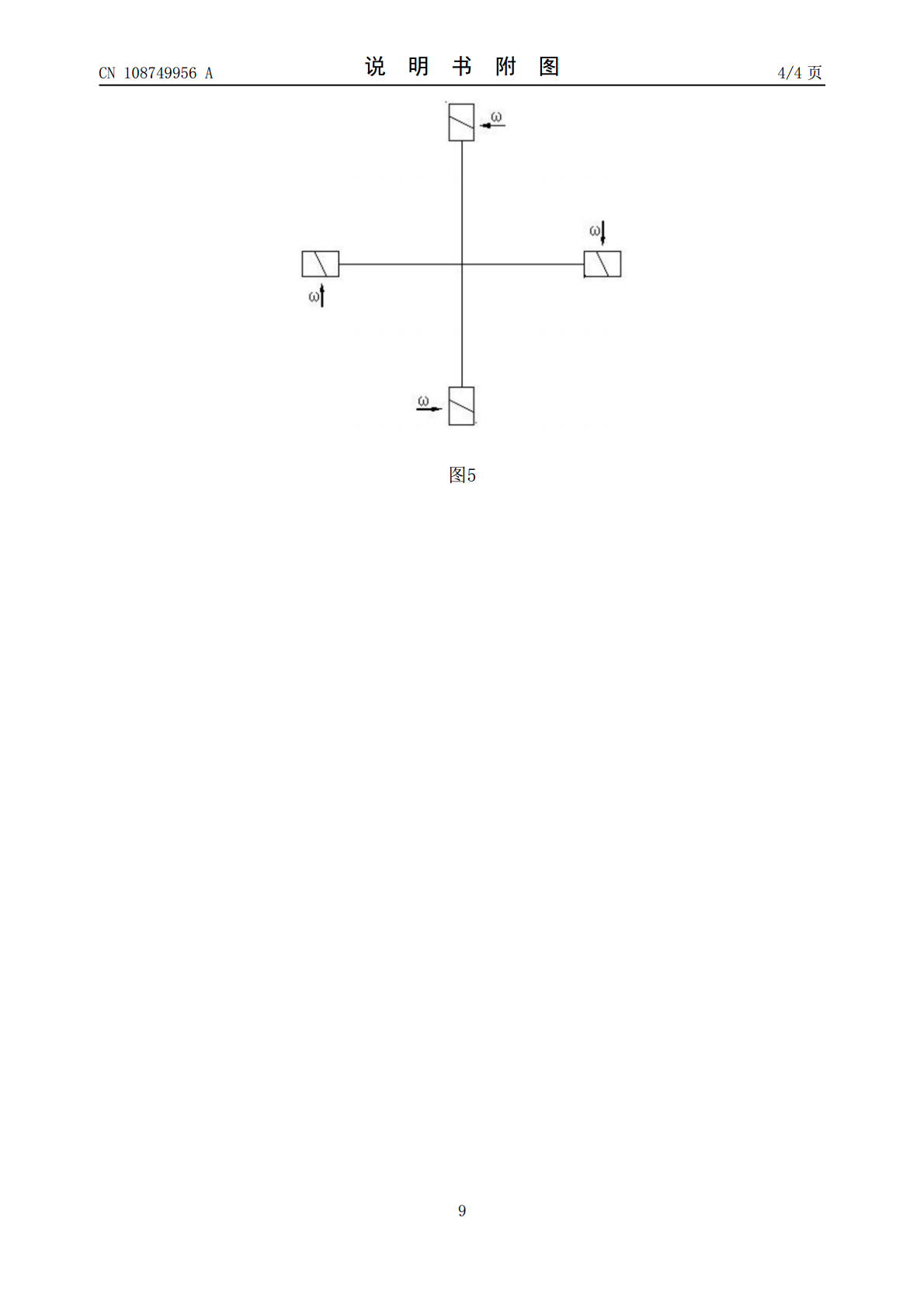
本发明公开了一种可变足迹的全向移动运载车,包括车体,车体的内部设置有悬架机构,外部设置有直线模组机构、变足迹机构、移动机构;直线模组机构包括一号直线模组、二号直线模组;一号直线模组、二号直线模组均为四个,四个一号直线模组对称设置在车体上并分别通过变足迹机构与二号直线模组相连接;移动机构设置在二号直线模组的下端;移动机构包括车轮罩、车轮、电机;变足迹机构包括一号杆、二号杆,一号杆与二号杆通过一号销轴呈X形铰接;悬架机构包括悬架弹簧、筒式阻尼器、悬架上支架、悬架下支架。本产品实现了无人驾驶且可以变足迹全向移动

一种重载全向移动AGV运载平台.pdf
本发明公开一种重载全向移动AGV运载平台,包括全向移动系统、驱动系统、独立悬挂机构、电源系统、升降机构、运动控制系统和吊装机构。全向移动系统包括车体骨架、底盘以及周向均匀分布在车体骨架上的双排麦克纳姆轮,四套升降机构位于车体骨架四周均匀分布,四组吊装机构安装于车身的四周;所述车体骨架采用高强度方钢管焊接制成,外壳采用全封闭设计;运动控制系统包含有自动收线器、无线接收器,能够满足有线控制与无线控制。本发明结构简单,控制灵活,可实现全方位运行,且有体积小,承载能力大,具有很高的刚度和强度,本发明可使用无线控制

一种全向移动自动导航车.pdf
一种全向移动自动导航车,它包括车架(1),车架(1)装有麦克纳姆轮(2)及电机(6),其特征在于:所述车架(1)上还设置有顶升机构(3),电池组(4),驱动卡机箱(5),第一电气柜(7)和第二电气柜(8);该动导航车能够满足现有密集仓储环境自动导航车行走路线狭窄,多变的要求,提高了自动导航车的适应性,减少了人工对自动导航车行走路线的修正次数,提高了仓储物流系统的自动化程度。
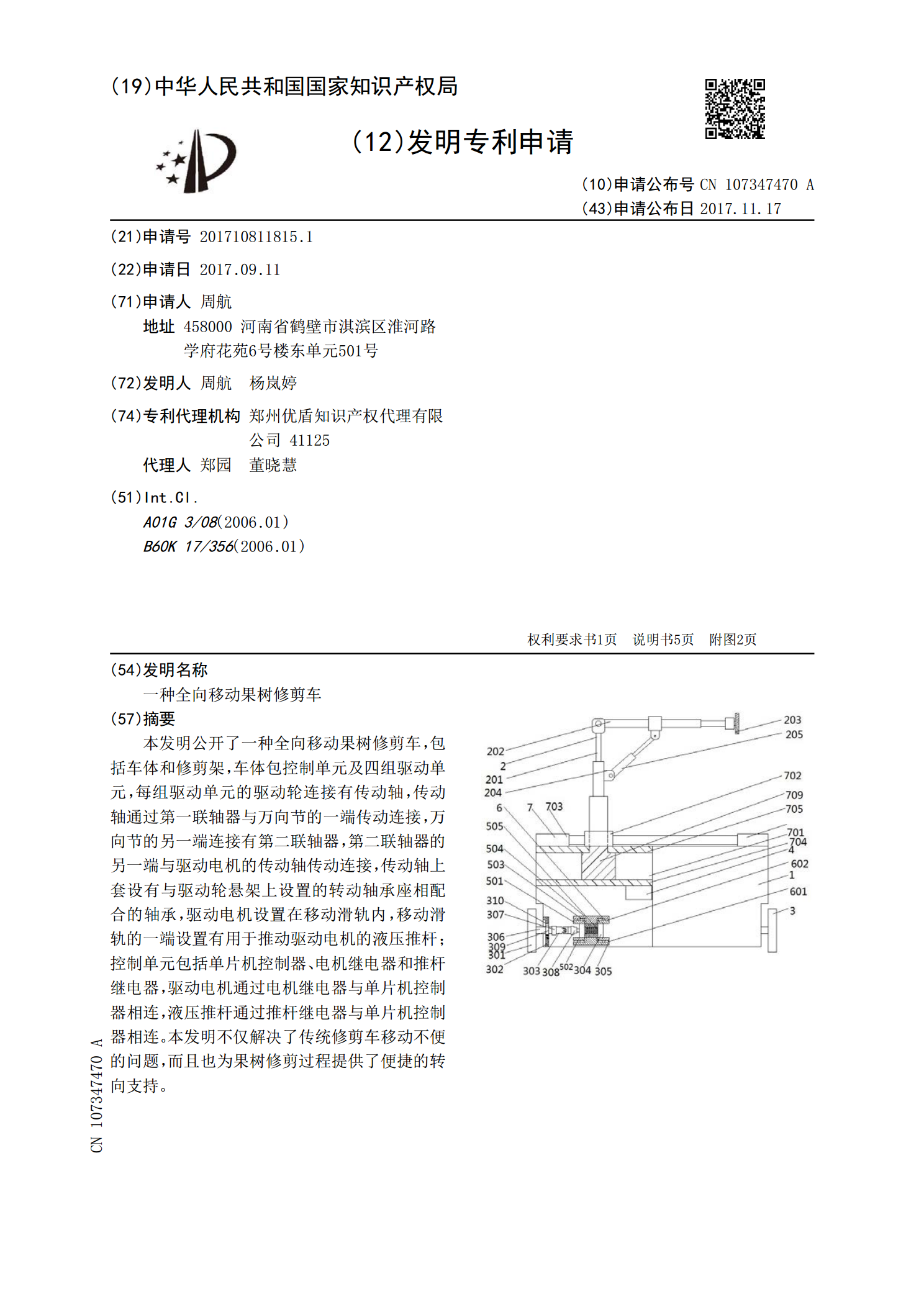
一种全向移动果树修剪车.pdf
本发明公开了一种全向移动果树修剪车,包括车体和修剪架,车体包控制单元及四组驱动单元,每组驱动单元的驱动轮连接有传动轴,传动轴通过第一联轴器与万向节的一端传动连接,万向节的另一端连接有第二联轴器,第二联轴器的另一端与驱动电机的传动轴传动连接,传动轴上套设有与驱动轮悬架上设置的转动轴承座相配合的轴承,驱动电机设置在移动滑轨内,移动滑轨的一端设置有用于推动驱动电机的液压推杆;控制单元包括单片机控制器、电机继电器和推杆继电器,驱动电机通过电机继电器与单片机控制器相连,液压推杆通过推杆继电器与单片机控制器相连。本发

一种新型全向可移动摄影车.pdf
本发明涉及一种摄影车,尤其是一种新型全向可移动摄影车。包括方形底盘、全向轮、控制箱、支撑柱、蓄电池、悬臂、钢丝绳、双滑轮组、垂直齿条、上齿轮箱、联轴器、下齿轮箱、步进电机、夹持装置、摄像机、空心杯直流伺服电机、吸附装置、垂直滑道等,所述全向轮是两两组合成一个整体使用,且采用十字形布置,所述空心杯直流伺服电机的输出轴与全向轮连接,所述控制箱、蓄电池均固定在方形底盘的上表面,所述控制箱和蓄电池之间设有支撑柱,所述摄像机固定在夹持装置上,所述双滑轮组的下表面焊接在上齿轮箱的上表面。有益效果:解决了拍摄画面不稳定