
移动距离的检测方法、装置和存储介质.pdf

诗文****仙女


1/10
2/10
3/10
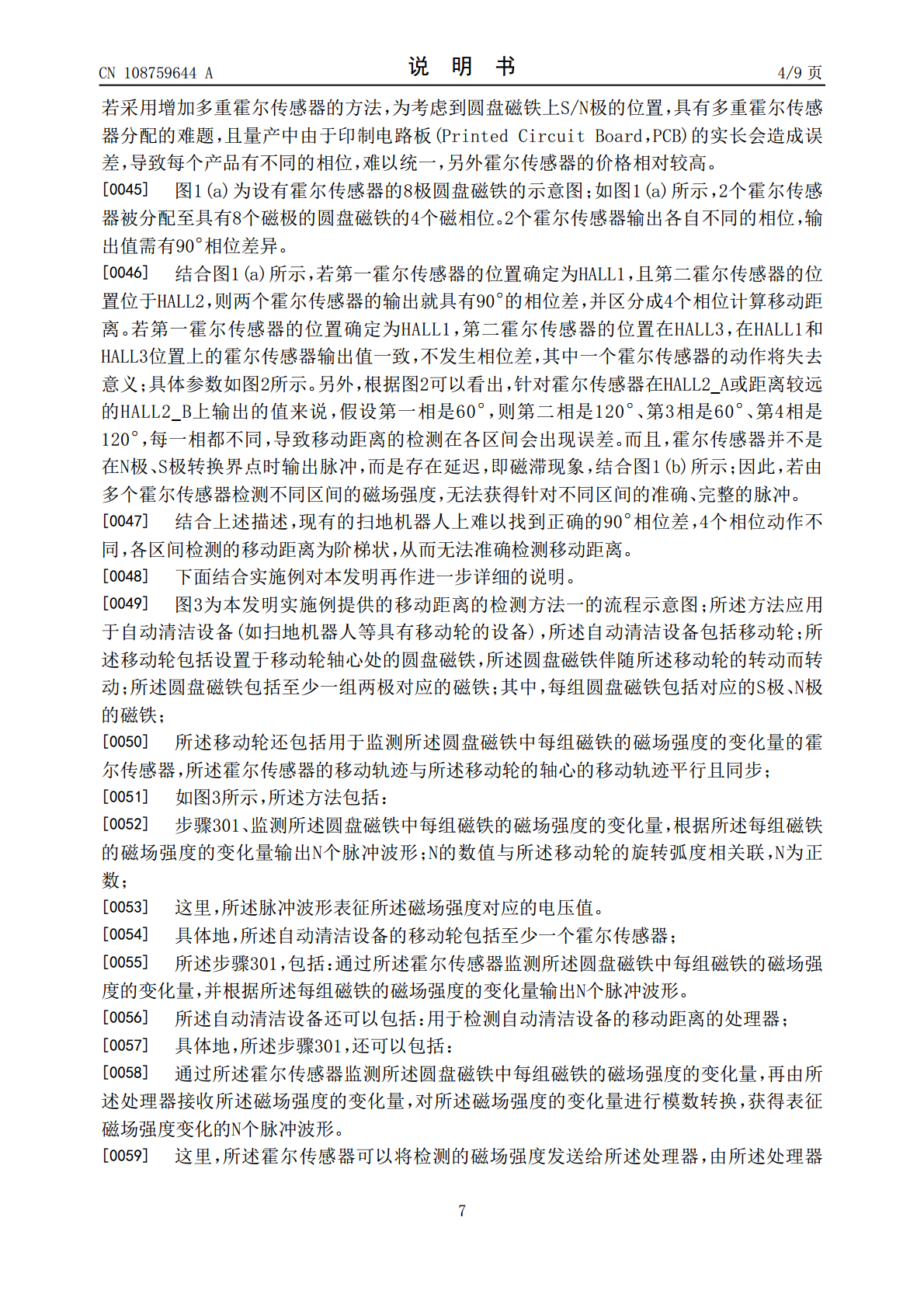
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动距离的检测方法、装置和存储介质.pdf
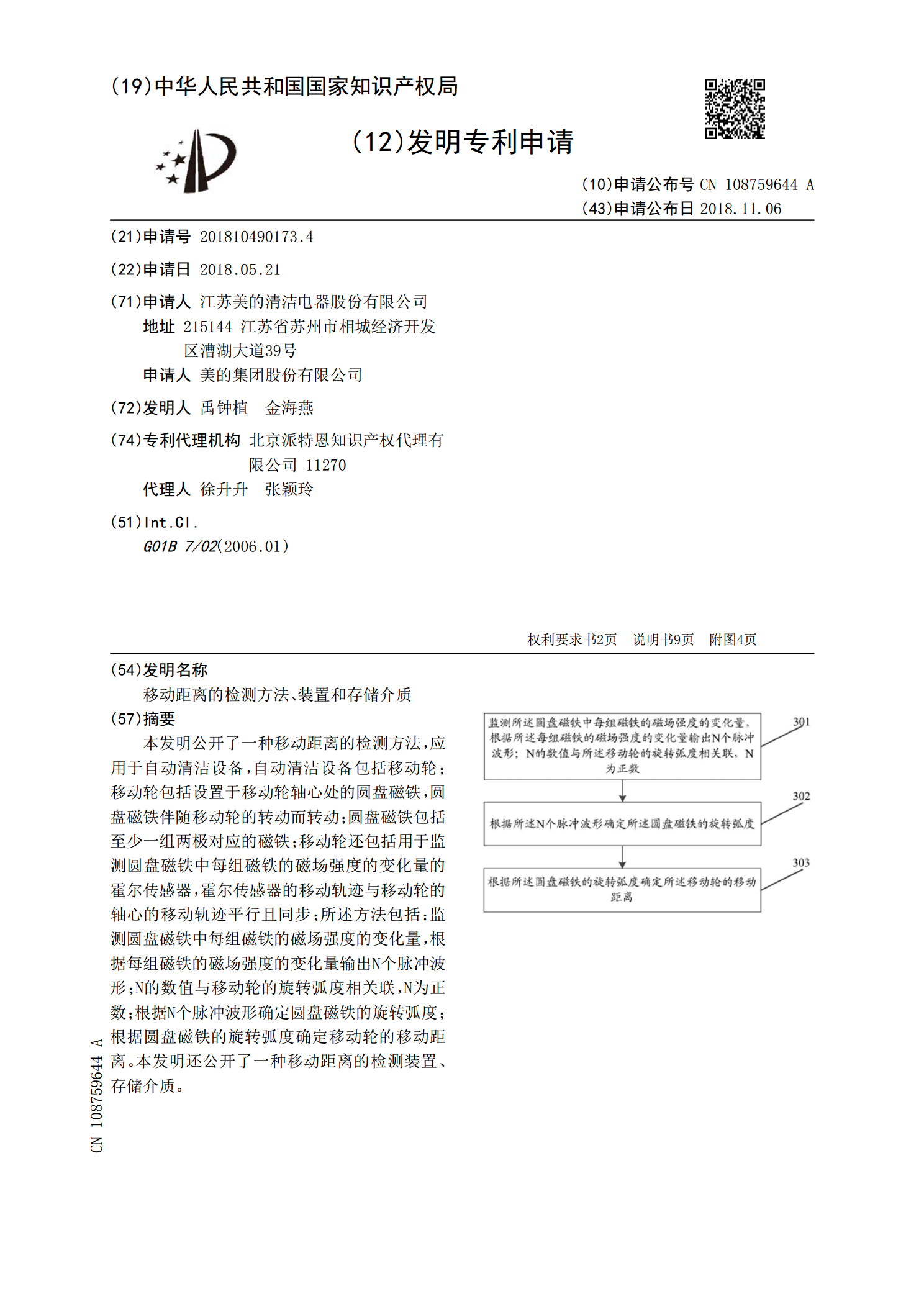
本发明公开了一种移动距离的检测方法,应用于自动清洁设备,自动清洁设备包括移动轮;移动轮包括设置于移动轮轴心处的圆盘磁铁,圆盘磁铁伴随移动轮的转动而转动;圆盘磁铁包括至少一组两极对应的磁铁;移动轮还包括用于监测圆盘磁铁中每组磁铁的磁场强度的变化量的霍尔传感器,霍尔传感器的移动轨迹与移动轮的轴心的移动轨迹平行且同步;所述方法包括:监测圆盘磁铁中每组磁铁的磁场强度的变化量,根据每组磁铁的磁场强度的变化量输出N个脉冲波形;N的数值与移动轮的旋转弧度相关联,N为正数;根据N个脉冲波形确定圆盘磁铁的旋转弧度;根据圆盘
距离检测方法、装置、服务器和存储介质.pdf
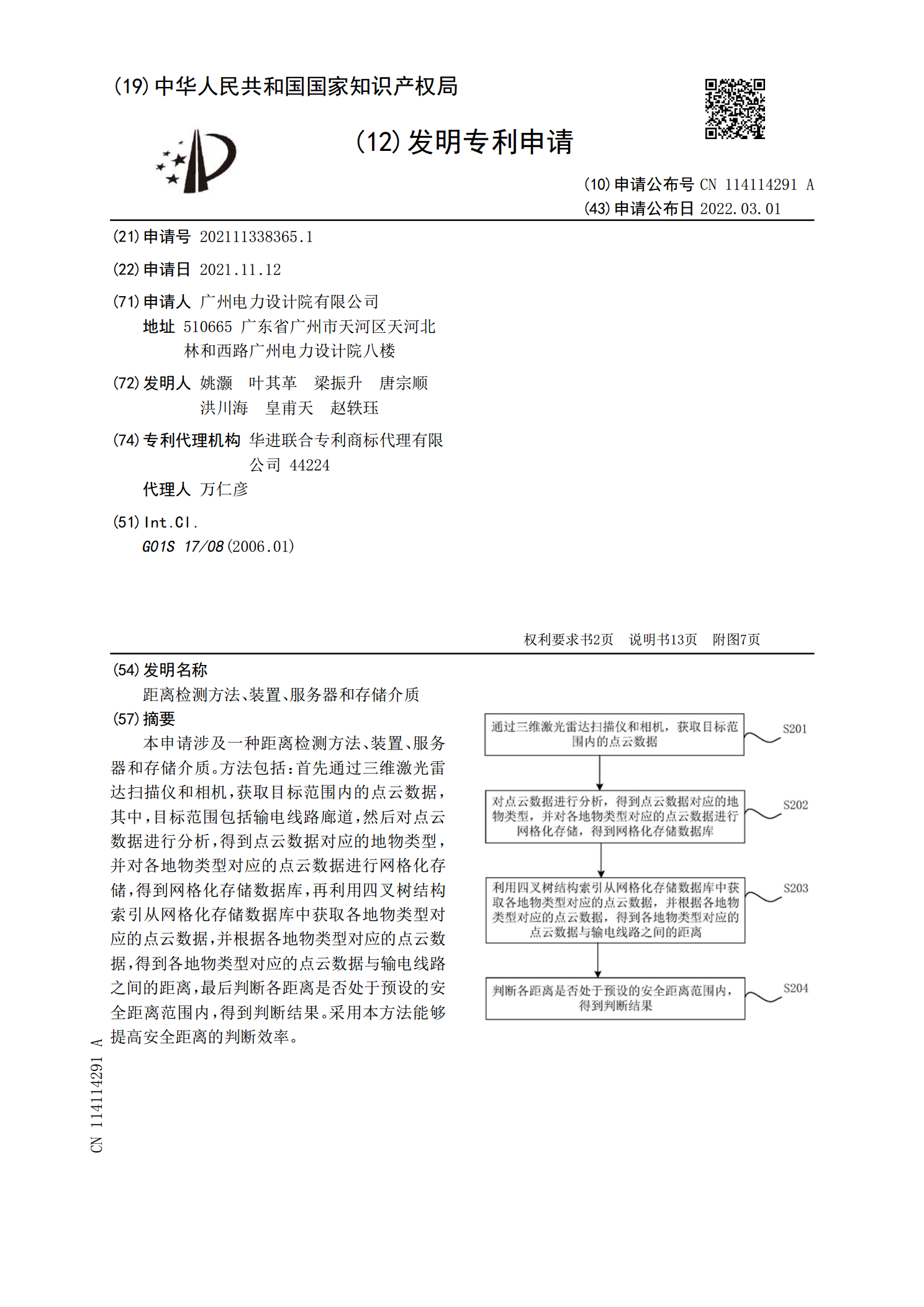
本申请涉及一种距离检测方法、装置、服务器和存储介质。方法包括:首先通过三维激光雷达扫描仪和相机,获取目标范围内的点云数据,其中,目标范围包括输电线路廊道,然后对点云数据进行分析,得到点云数据对应的地物类型,并对各地物类型对应的点云数据进行网格化存储,得到网格化存储数据库,再利用四叉树结构索引从网格化存储数据库中获取各地物类型对应的点云数据,并根据各地物类型对应的点云数据,得到各地物类型对应的点云数据与输电线路之间的距离,最后判断各距离是否处于预设的安全距离范围内,得到判断结果。采用本方法能够提高安全距离的
距离采样方法、装置、设备和存储介质.pdf
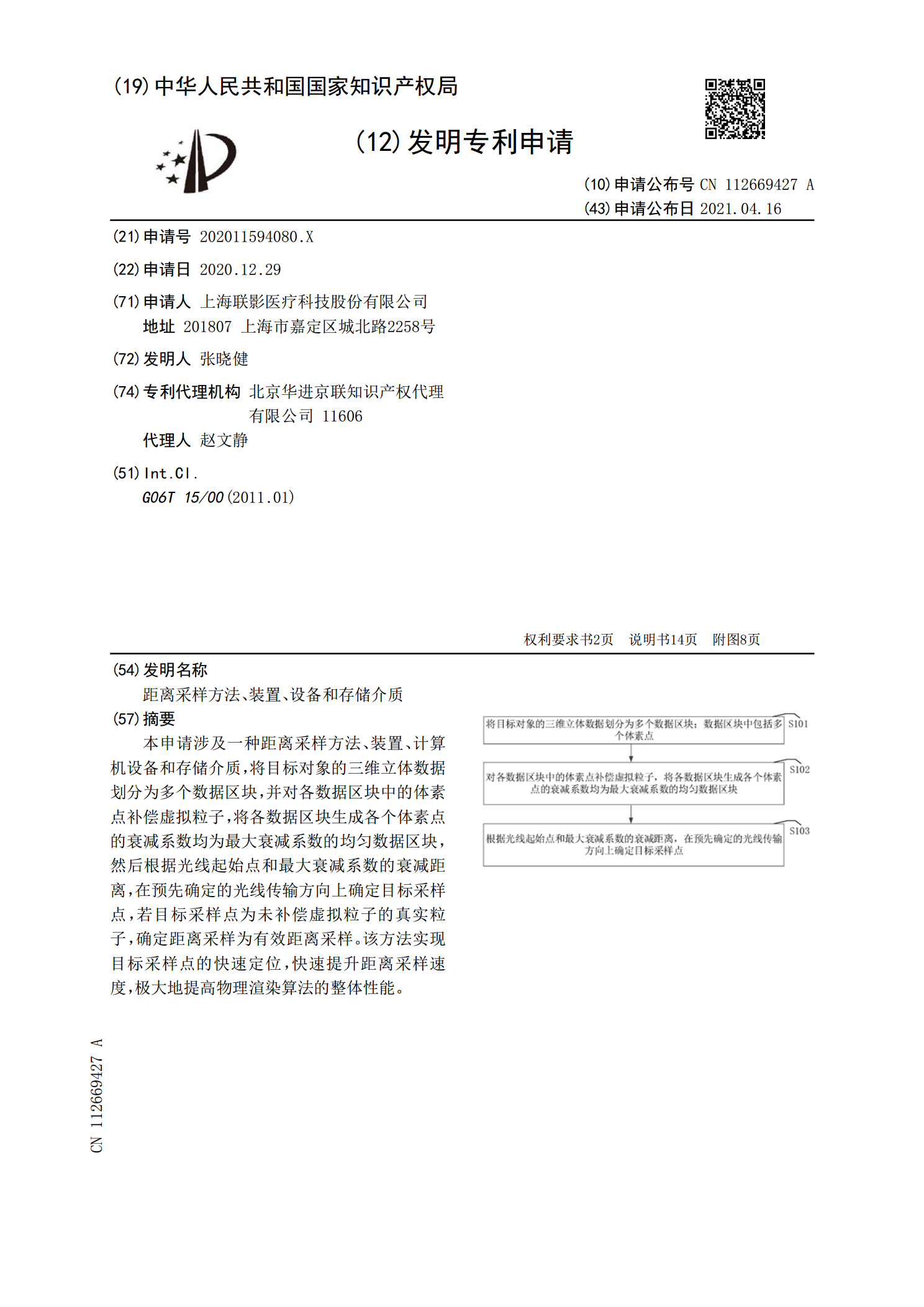
本申请涉及一种距离采样方法、装置、计算机设备和存储介质,将目标对象的三维立体数据划分为多个数据区块,并对各数据区块中的体素点补偿虚拟粒子,将各数据区块生成各个体素点的衰减系数均为最大衰减系数的均匀数据区块,然后根据光线起始点和最大衰减系数的衰减距离,在预先确定的光线传输方向上确定目标采样点,若目标采样点为未补偿虚拟粒子的真实粒子,确定距离采样为有效距离采样。该方法实现目标采样点的快速定位,快速提升距离采样速度,极大地提高物理渲染算法的整体性能。
距离检测方法、装置、终端设备及存储介质.pdf
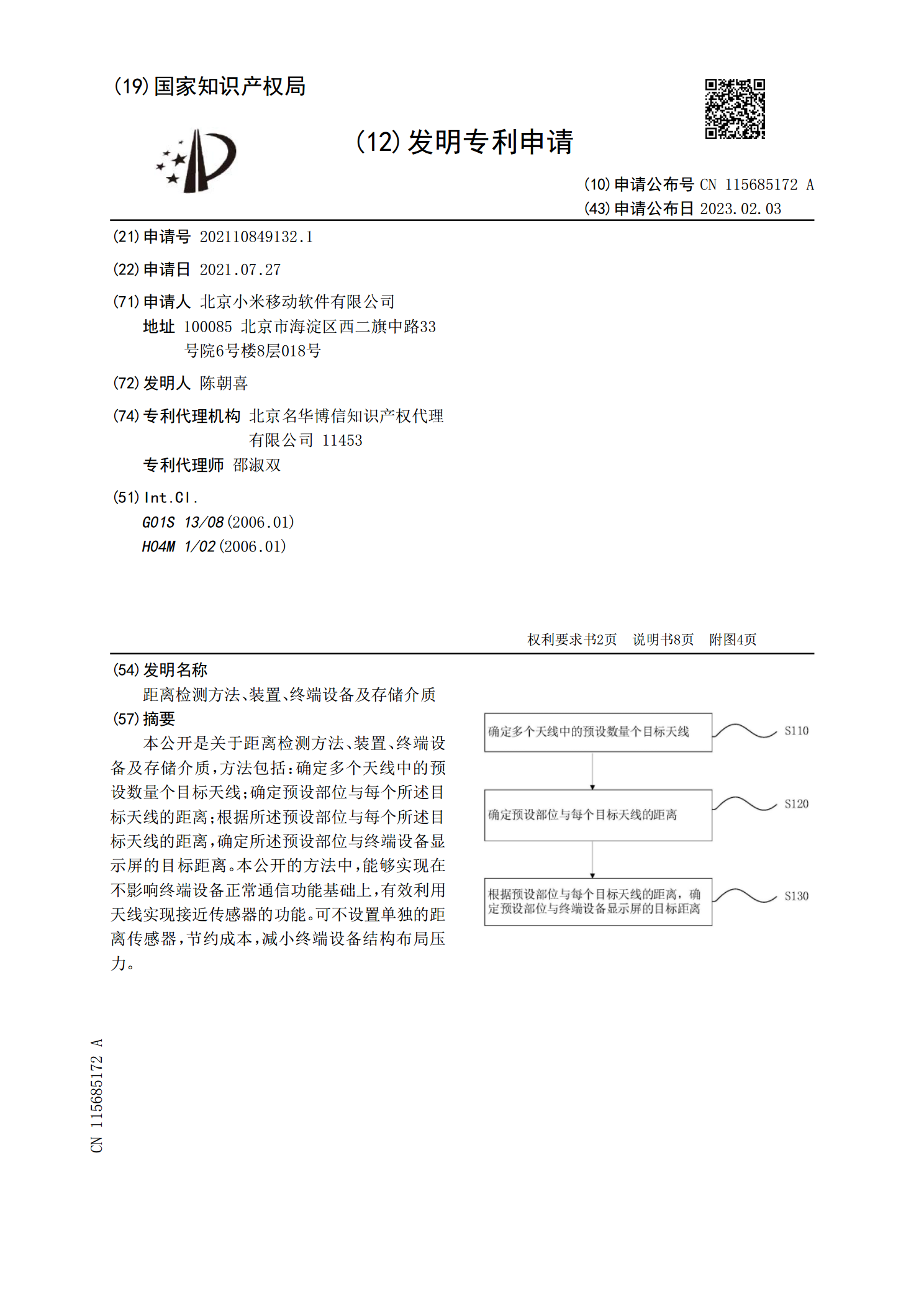
本公开是关于距离检测方法、装置、终端设备及存储介质,方法包括:确定多个天线中的预设数量个目标天线;确定预设部位与每个所述目标天线的距离;根据所述预设部位与每个所述目标天线的距离,确定所述预设部位与终端设备显示屏的目标距离。本公开的方法中,能够实现在不影响终端设备正常通信功能基础上,有效利用天线实现接近传感器的功能。可不设置单独的距离传感器,节约成本,减小终端设备结构布局压力。
距离检测方法及装置、电子设备及存储介质.pdf
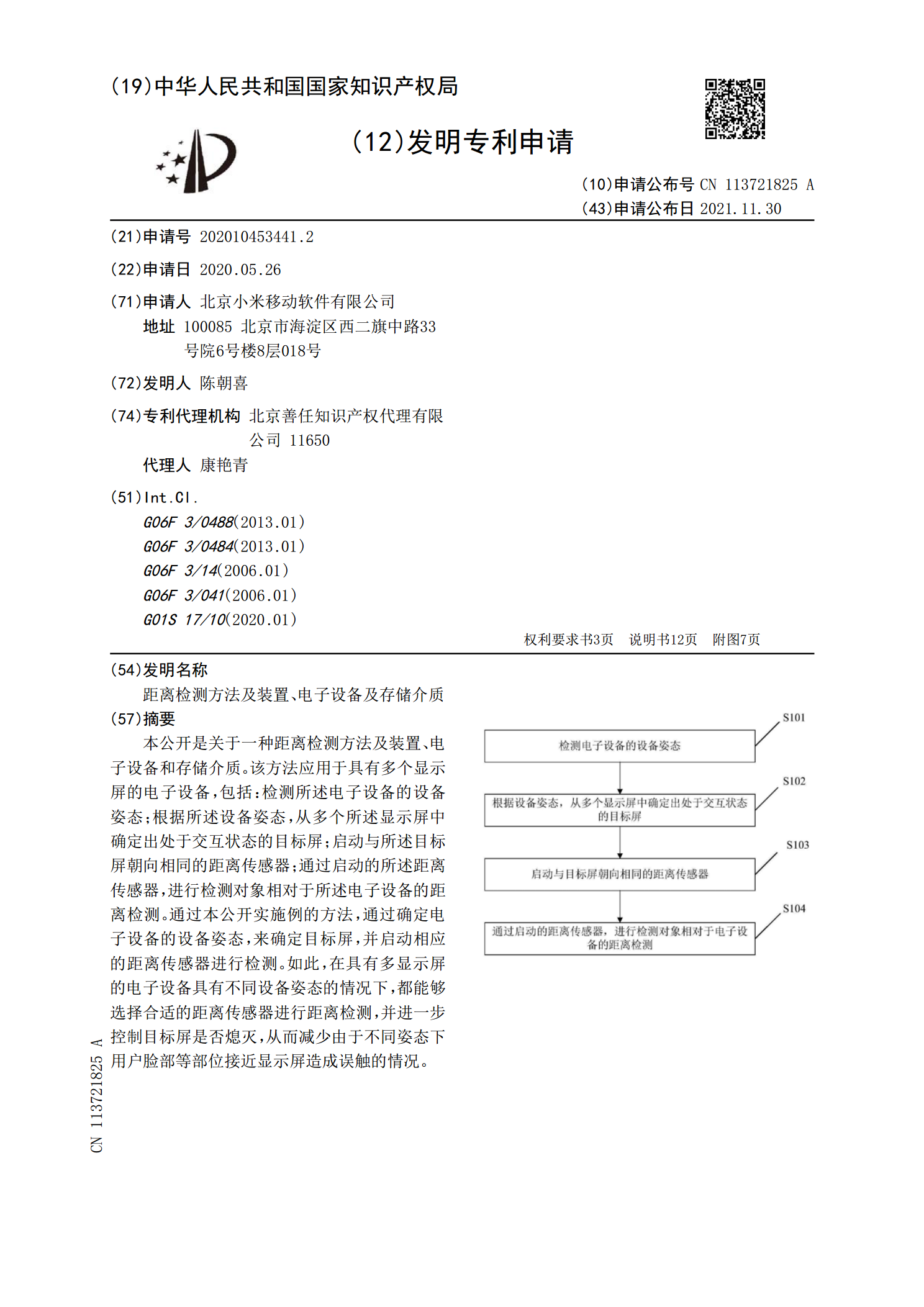
本公开是关于一种距离检测方法及装置、电子设备和存储介质。该方法应用于具有多个显示屏的电子设备,包括:检测所述电子设备的设备姿态;根据所述设备姿态,从多个所述显示屏中确定出处于交互状态的目标屏;启动与所述目标屏朝向相同的距离传感器;通过启动的所述距离传感器,进行检测对象相对于所述电子设备的距离检测。通过本公开实施例的方法,通过确定电子设备的设备姿态,来确定目标屏,并启动相应的距离传感器进行检测。如此,在具有多显示屏的电子设备具有不同设备姿态的情况下,都能够选择合适的距离传感器进行距离检测,并进一步控制目标屏