
基于海底观测网络的AUV非接触接驳技术研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于海底观测网络的AUV非接触接驳技术研究的开题报告.docx
基于海底观测网络的AUV非接触接驳技术研究的开题报告开题报告题目:基于海底观测网络的AUV非接触接驳技术研究一、研究背景随着近年来海洋和深海开发的加速,海洋资源的开发利用越来越受到人们的关注。然而,人类对于海底的了解依然相对有限,而深海勘探又存在着许多困难。海底观测网络作为一种新型的海洋探测技术,提供了一种全新的海洋观测手段。AUV(AutonomousUnderwaterVehicle,自主水下机器人)则是一种成功应用于海底观测网络中的设备,其具有自主控制、高度灵活性等优点,在深海勘探中凸显出了重要的作

基于海底观测网络的AUV非接触接驳技术研究的任务书.docx
基于海底观测网络的AUV非接触接驳技术研究的任务书任务书项目名称:基于海底观测网络的AUV非接触接驳技术研究项目背景:海洋是人类探索的“最后的疆域”,相比陆地与空气,海洋空间更加广阔、条件更加复杂。为了探索深海空间,许多国家都发起了自己的深海探测计划,比如中国的“深海工程”计划、美国的“海洋计划”等。而这些计划的核心研究对象都是海洋科学和技术。其中,海底观测网络技术是海底探测计划中一个非常重要的研究方向。海底观测网络可将地球表面大约70%的海洋覆盖范围内的信息进行无缝衔接的实时监测,包括海底地形与地貌、海

海底观测网络水下接驳盒原型系统技术研究的开题报告.docx
海底观测网络水下接驳盒原型系统技术研究的开题报告一、研究背景与意义海底观测网络是一种广泛应用于海洋科学研究、海洋气象观测、海洋环境监测等领域的技术手段,具有多节点、分布式、实时、高精度等特点。海底观测网络在实际应用中需要各节点间的数据传输和控制指令的传递,这需要水下接驳盒作为节点间的桥梁,将数据和指令传递到各个节点。当前海底观测网络中存在着水下接驳盒技术难题,主要表现为以下两个方面:(1)水下接驳盒的可靠性和稳定性需要进一步提高,以满足海底环境的极端条件。同时水下接驳盒的数据传输速率也需要进一步提高。(2

基于感应电能传输的水下AUV非接触充电技术研究的开题报告.docx
基于感应电能传输的水下AUV非接触充电技术研究的开题报告一、研究背景水下机器人技术是近年来航海领域的一项重要技术,其应用范围涉及到海洋资源勘探、海上自卫、海底探测等多个领域。然而,长时间的水下运行要求水下机器人必须能够有效地充电,但是在水下充电技术方面存在着一系列难题,其中最主要的难题是如何在水下环境下进行非接触式的充电。近年来,随着感应电能传输技术的发展,这一问题开始逐渐解决。感应电能传输技术是一种利用电磁感应的物理现象,将电能从一个线圈(即发射线圈)传输到另一个线圈(即接收线圈)的技术。该技术最初是应
长期值守型AUV海底接驳基站及其非接触式运维系统和方法.pdf
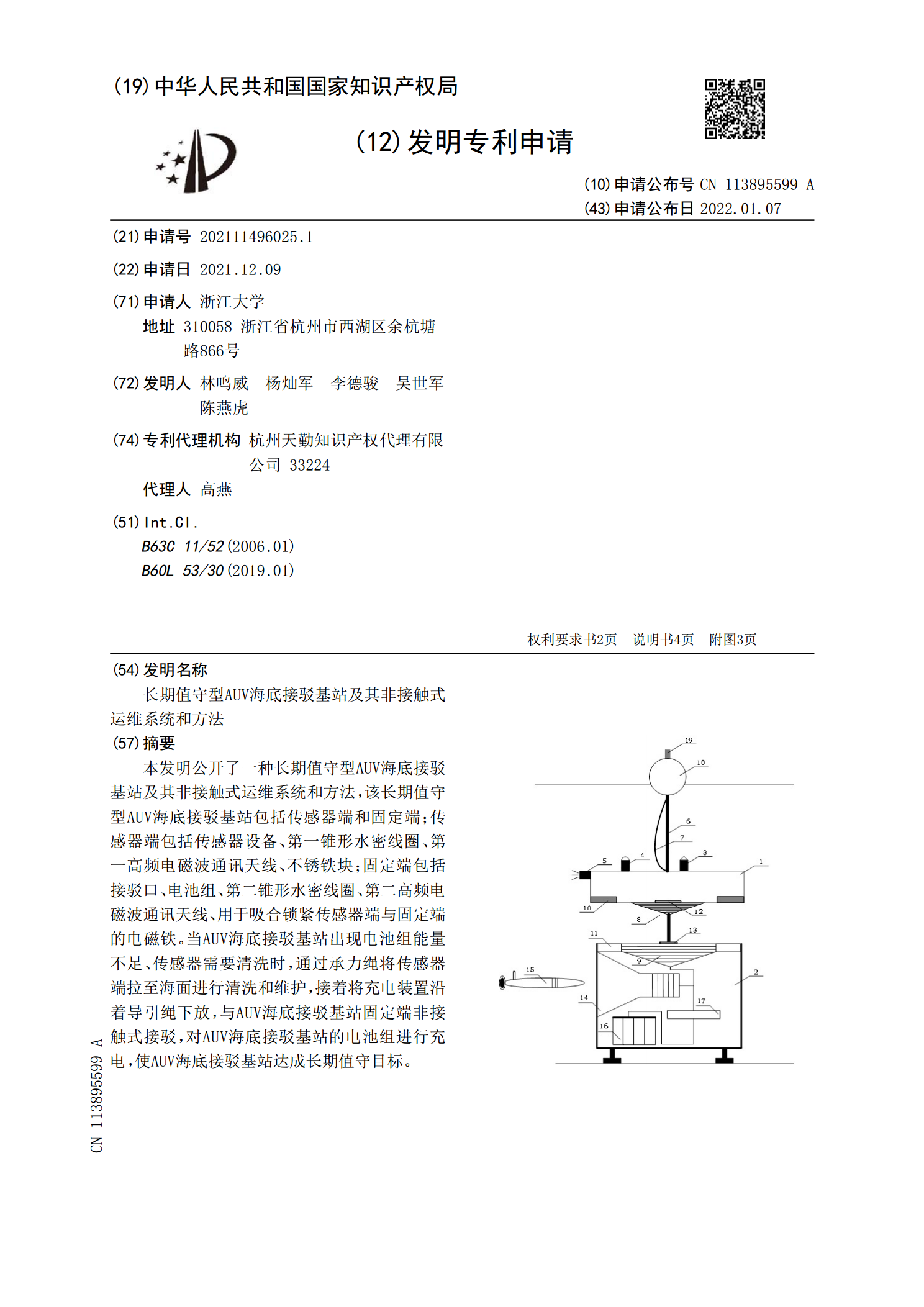
本发明公开了一种长期值守型AUV海底接驳基站及其非接触式运维系统和方法,该长期值守型AUV海底接驳基站包括传感器端和固定端;传感器端包括传感器设备、第一锥形水密线圈、第一高频电磁波通讯天线、不锈铁块;固定端包括接驳口、电池组、第二锥形水密线圈、第二高频电磁波通讯天线、用于吸合锁紧传感器端与固定端的电磁铁。当AUV海底接驳基站出现电池组能量不足、传感器需要清洗时,通过承力绳将传感器端拉至海面进行清洗和维护,接着将充电装置沿着导引绳下放,与AUV海底接驳基站固定端非接触式接驳,对AUV海底接驳基站的电池组进行