
一种人体下肢康复辅助装置.pdf

书生****写意


1/7
2/7
3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种人体下肢康复辅助装置.pdf
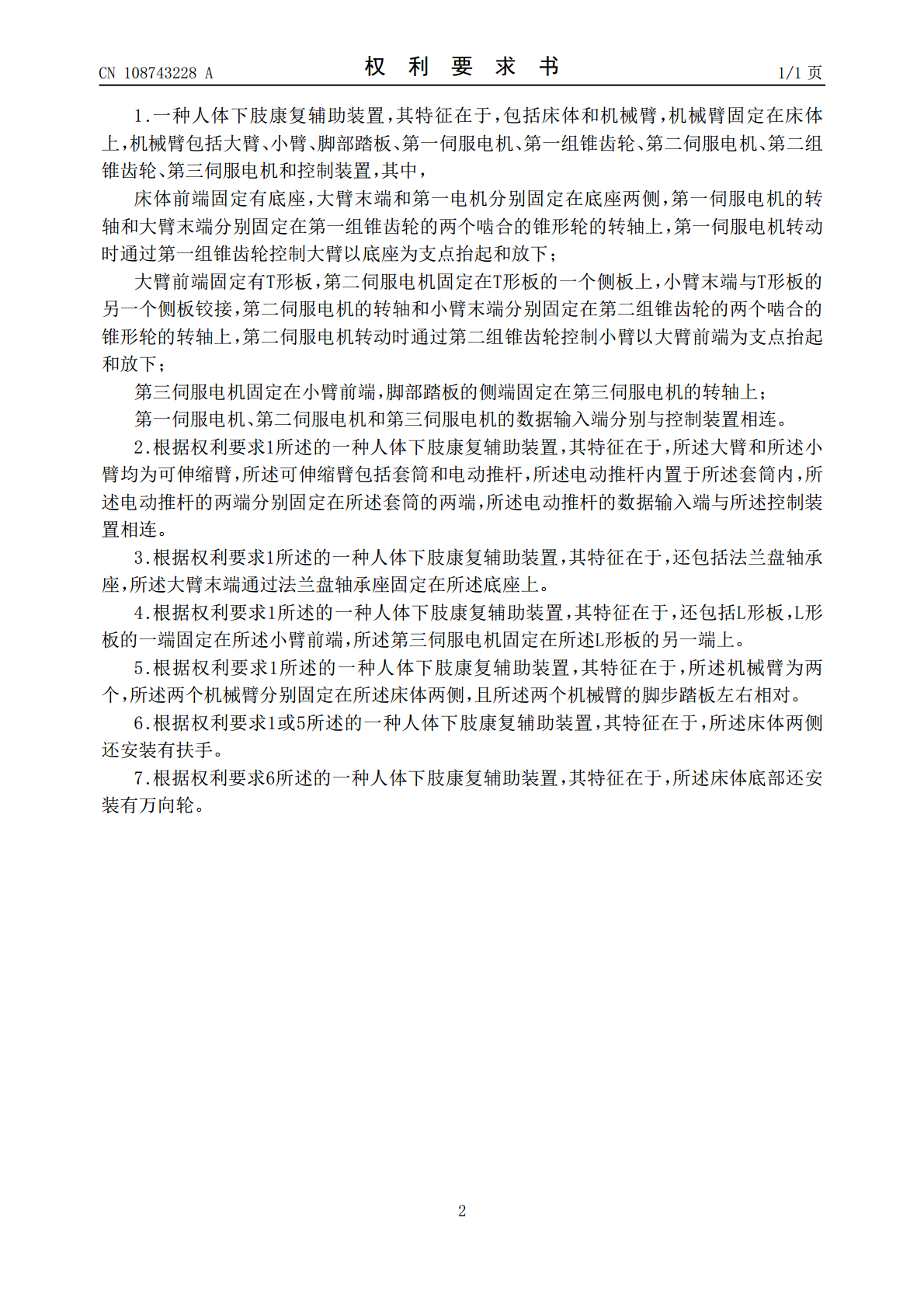
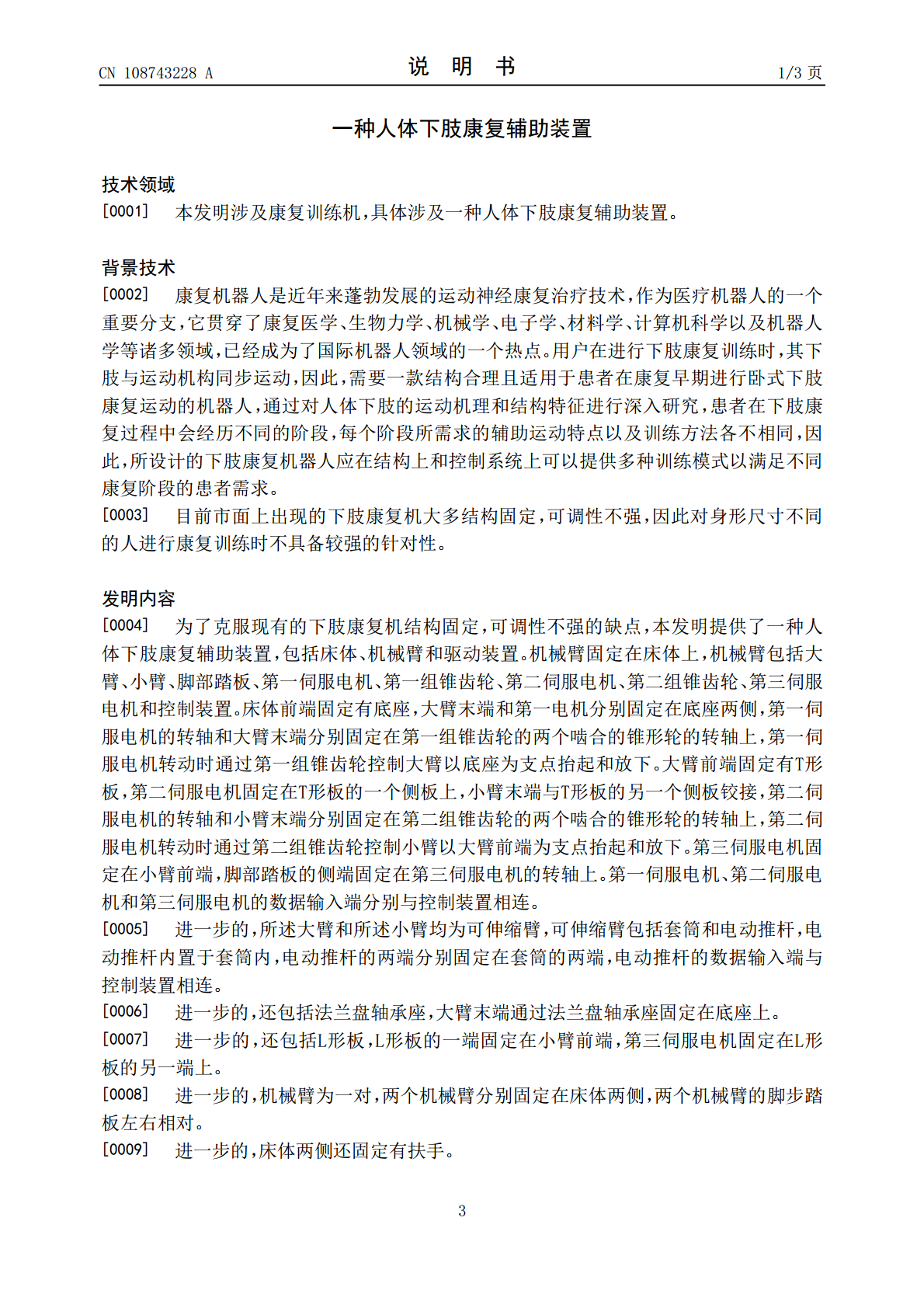
一种人体下肢康复辅助装置,包括床体、机械臂和驱动装置。机械臂固定在床体上,机械臂包括大臂、小臂、脚部踏板、第一伺服电机、第一组锥齿轮、第二伺服电机、第二组锥齿轮、第三伺服电机和控制装置。第二伺服电机转动时通过第二组锥齿轮控制小臂以大臂前端为支点抬起和放下。第一伺服电机、第二伺服电机和第三伺服电机的数据输入端分别与控制装置相连。第一伺服电机转动时通过第一组锥齿轮控制大臂以底座为支点抬起和放下。本发明的一种人体下肢康复辅助装置,可根据不同用户的身体状况灵活调节大臂、小臂及其摆动幅度和速率,可调性高,适应性好。
一种骨科下肢康复辅助装置.pdf
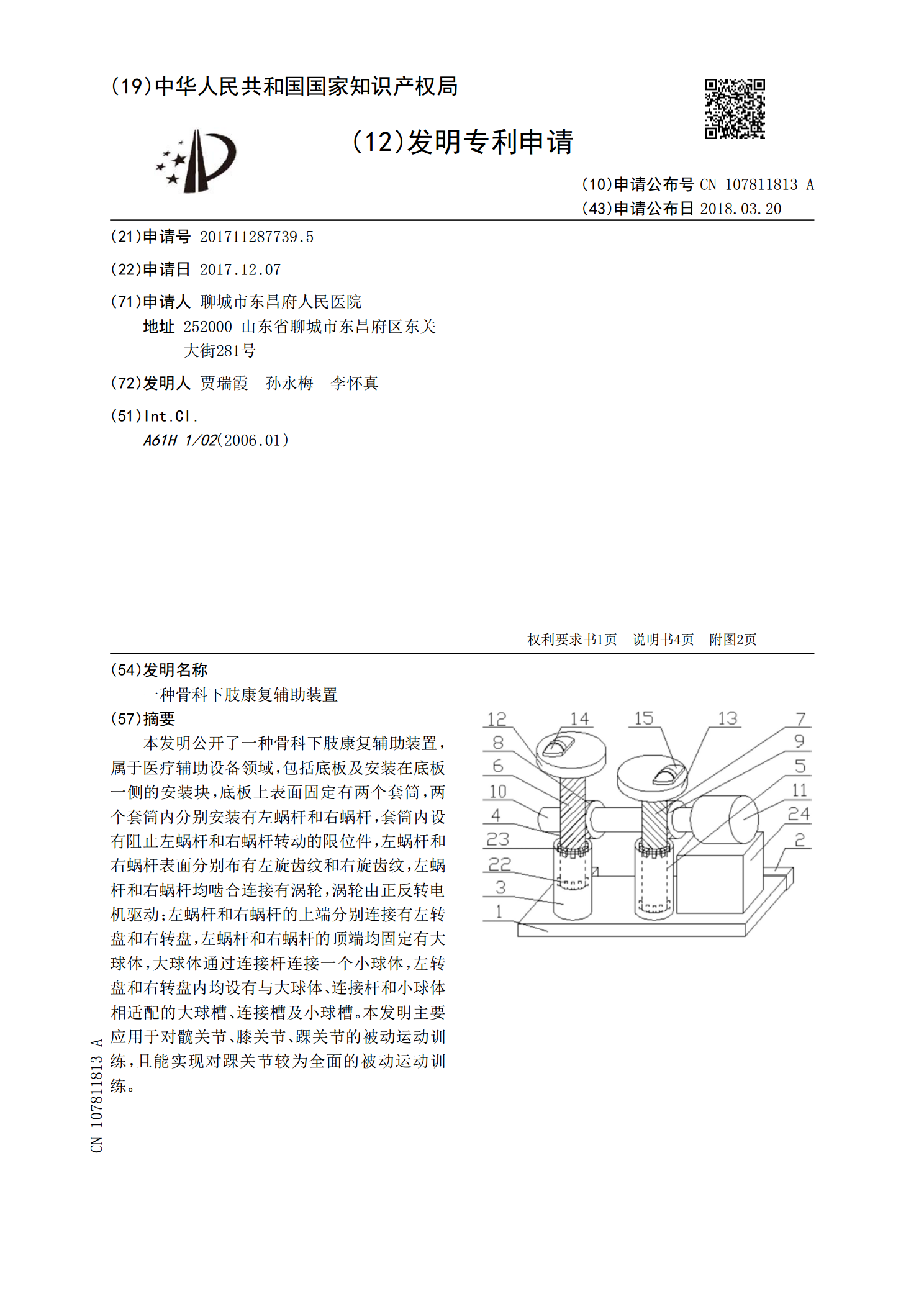
本发明公开了一种骨科下肢康复辅助装置,属于医疗辅助设备领域,包括底板及安装在底板一侧的安装块,底板上表面固定有两个套筒,两个套筒内分别安装有左蜗杆和右蜗杆,套筒内设有阻止左蜗杆和右蜗杆转动的限位件,左蜗杆和右蜗杆表面分别布有左旋齿纹和右旋齿纹,左蜗杆和右蜗杆均啮合连接有涡轮,涡轮由正反转电机驱动;左蜗杆和右蜗杆的上端分别连接有左转盘和右转盘,左蜗杆和右蜗杆的顶端均固定有大球体,大球体通过连接杆连接一个小球体,左转盘和右转盘内均设有与大球体、连接杆和小球体相适配的大球槽、连接槽及小球槽。本发明主要应用于对髋
一种多功能下肢康复辅助装置.pdf
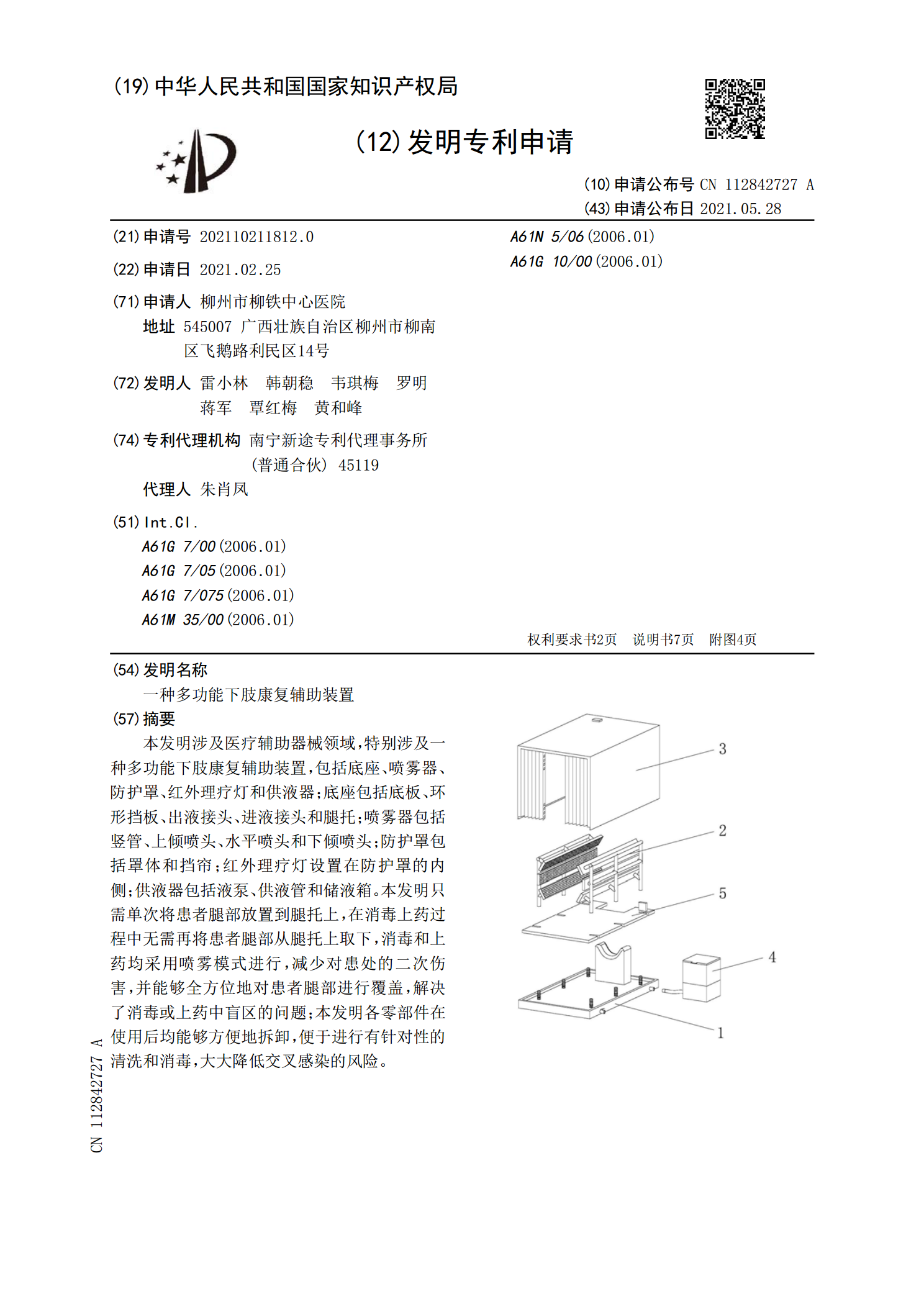
本发明涉及医疗辅助器械领域,特别涉及一种多功能下肢康复辅助装置,包括底座、喷雾器、防护罩、红外理疗灯和供液器;底座包括底板、环形挡板、出液接头、进液接头和腿托;喷雾器包括竖管、上倾喷头、水平喷头和下倾喷头;防护罩包括罩体和挡帘;红外理疗灯设置在防护罩的内侧;供液器包括液泵、供液管和储液箱。本发明只需单次将患者腿部放置到腿托上,在消毒上药过程中无需再将患者腿部从腿托上取下,消毒和上药均采用喷雾模式进行,减少对患处的二次伤害,并能够全方位地对患者腿部进行覆盖,解决了消毒或上药中盲区的问题;本发明各零部件在使用

一种下肢无力患者行走康复辅助装置.pdf
本发明公开了一种下肢无力患者行走康复辅助装置,涉及医疗康复设备技术领域,包括U型架,所述U型架开口向下,所述调整板的底部通过横连板与U型架的中部固定连接。本发明通过设置手握杆,能够利用患者的力量向后拉动手握杆,从而使摇杆向前转动,利用顶部拉环拉动大腿板的底部向前,从而对患者的腿部向前迈动进行助力,达到不需要外部动力就能够辅助行走的目的,通过设置花键孔,能够利用外部调整使用的花键轴对束腰带的高度进行调整,从而使束腰带的位置能够适应患者的高度,通过设置束腰带,能够对患者的腹部进行固定,通过设置腋托板能够对患者

人体下肢肌痉挛康复装置研究.docx
人体下肢肌痉挛康复装置研究人体下肢肌痉挛康复装置研究引言:下肢肌痉挛是一种常见的症状,它可以在普通活动中或在睡眠中引起疼痛不适,严重影响人们的生活质量。下肢肌肉痉挛是许多疾病的主要特征,包括脊髓损伤、多发性硬化症、帕金森病、中风和脑瘤等疾病。针对下肢痉挛,一些物理治疗可以缓解其症状,例如热敷、冷敷和按摩等,但效果有限。因此,研究下肢肌痉挛康复装置成为人们关注的焦点。下文将从下肢肌痉挛治疗概述、下肢肌肉痉挛原因、下肢肌肉痉挛的临床表现、下肢肌肉痉挛康复器具的应用、下肢肌肉痉挛康复装置的分类、下肢肌肉痉挛康复