
一种夹持稳定的机械臂.pdf

是丹****ni

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种夹持稳定的机械臂.pdf
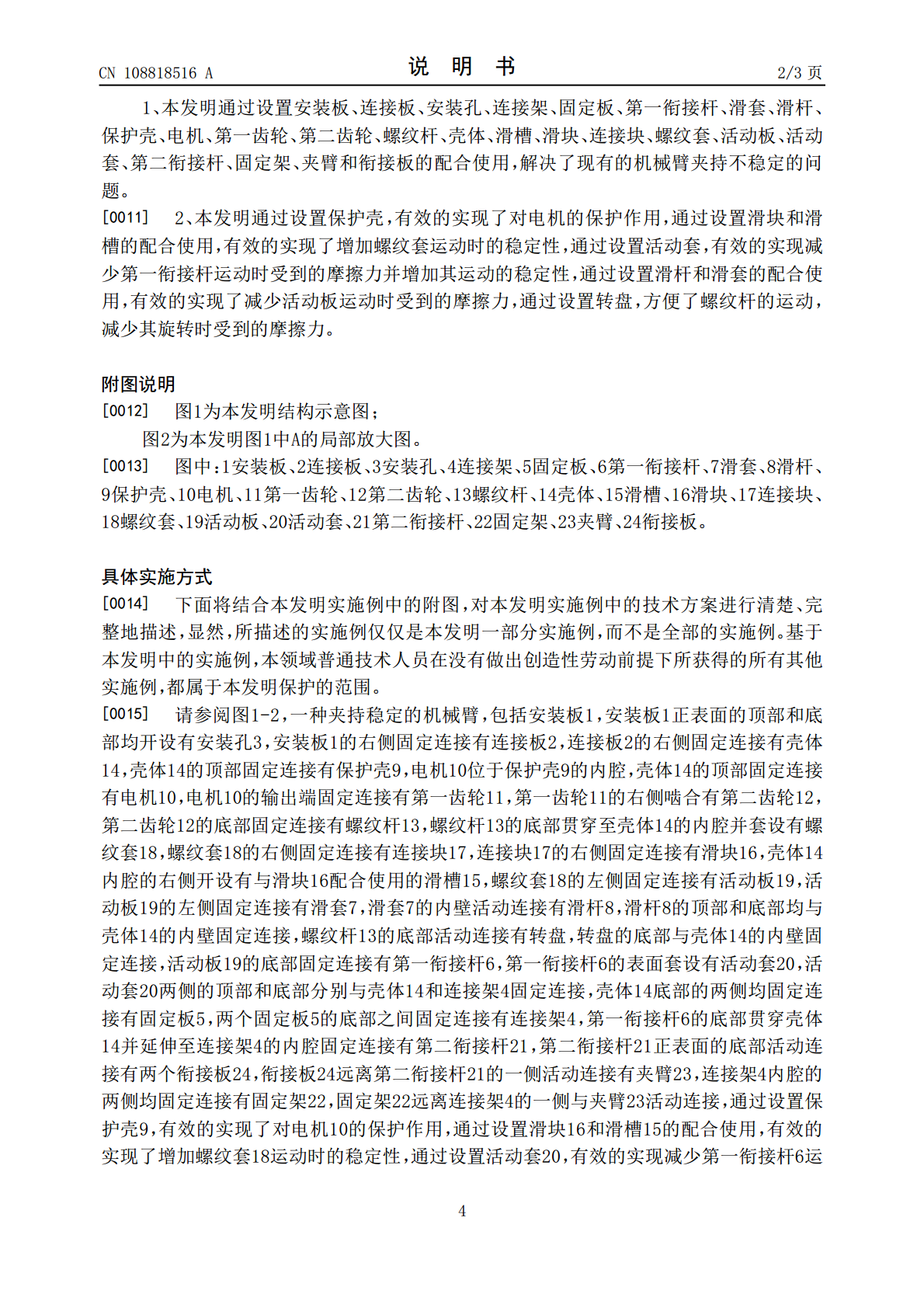
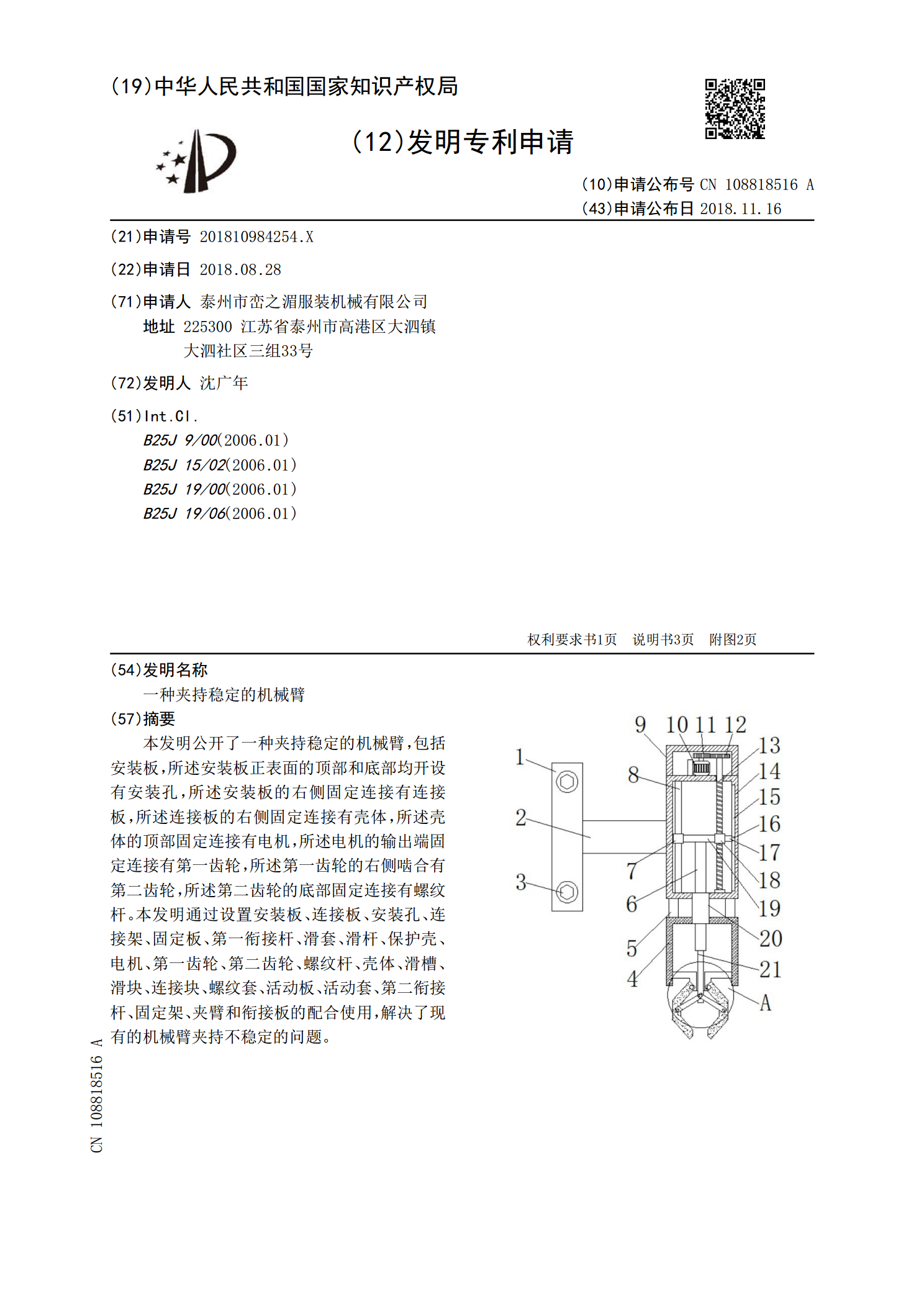
本发明公开了一种夹持稳定的机械臂,包括安装板,所述安装板正表面的顶部和底部均开设有安装孔,所述安装板的右侧固定连接有连接板,所述连接板的右侧固定连接有壳体,所述壳体的顶部固定连接有电机,所述电机的输出端固定连接有第一齿轮,所述第一齿轮的右侧啮合有第二齿轮,所述第二齿轮的底部固定连接有螺纹杆。本发明通过设置安装板、连接板、安装孔、连接架、固定板、第一衔接杆、滑套、滑杆、保护壳、电机、第一齿轮、第二齿轮、螺纹杆、壳体、滑槽、滑块、连接块、螺纹套、活动板、活动套、第二衔接杆、固定架、夹臂和衔接板的配合使用,解决

一种轮胎夹持机械臂.pdf
一种轮胎夹持机械臂,属于机械式立体停车设备技术领域。包括滑道、两个对称设置的拉动板、两对称夹臂、平动装置及摆动装置,所述拉动板一端置于滑道的滑道槽内连接平动装置,夹臂连接端和滑道的导向轨道两端部上均带有接触时配合连接的摆动装置,通过平动装置带动两夹臂平行移动,移动到滑道的导向轨道两端时,通过摆动装置带动夹臂摆动。本发明实现了在一个动力源的作用下,实现机械手臂的平动夹持和摆动展开两个运动过程;结构简单、可靠性好,在同样的运动和输出力需求下,便于降低结构的高度。
一种塑料瓶夹持机械臂.pdf
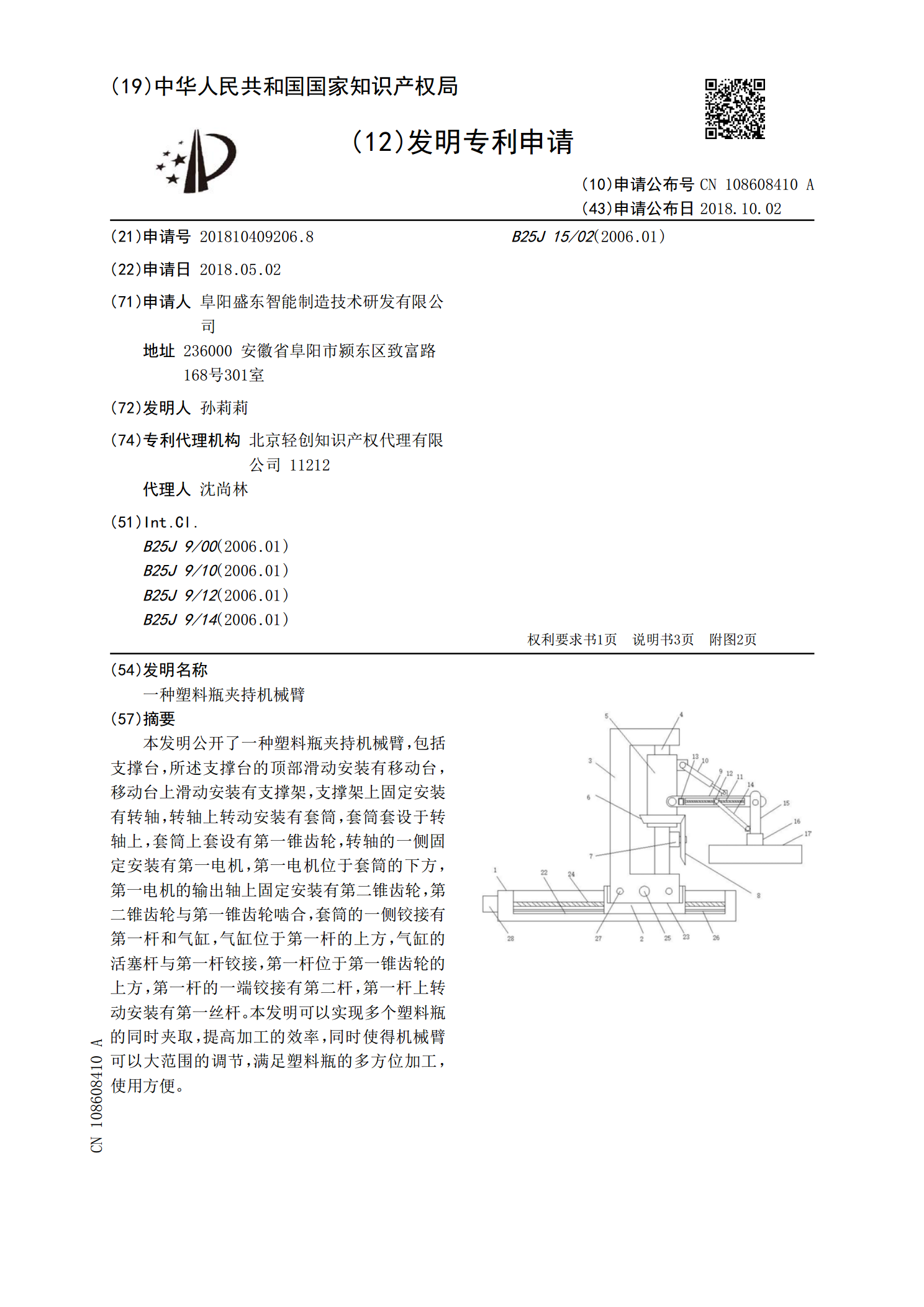
本发明公开了一种塑料瓶夹持机械臂,包括支撑台,所述支撑台的顶部滑动安装有移动台,移动台上滑动安装有支撑架,支撑架上固定安装有转轴,转轴上转动安装有套筒,套筒套设于转轴上,套筒上套设有第一锥齿轮,转轴的一侧固定安装有第一电机,第一电机位于套筒的下方,第一电机的输出轴上固定安装有第二锥齿轮,第二锥齿轮与第一锥齿轮啮合,套筒的一侧铰接有第一杆和气缸,气缸位于第一杆的上方,气缸的活塞杆与第一杆铰接,第一杆位于第一锥齿轮的上方,第一杆的一端铰接有第二杆,第一杆上转动安装有第一丝杆。本发明可以实现多个塑料瓶的同时夹取

液压定向夹持机械臂.pdf
本发明涉及机械臂技术领域,尤其是一种液压定向夹持机械臂,由液压缸、机架、轴承座、减速机、伺服电机、底座、主轴、轴承和耐磨垫片组成,所述的底座上安装轴承座,主轴及轴承安装在轴承座内,主轴前方连接有机架,机架间形成可调节的钳口,钳口通过液压缸控制大小,所述钳口内安装有可更换式耐磨垫片;所述的轴承座后方连接直角减速器,减速器下方安装有伺服电机。本发明液压定向夹持机械臂设计先进、工作可靠、操作简便,可以实现车轴的夹持,翻转等多种高精度动作,配合工装可以实现车轴和齿轮的自动化装配,提高生产效率和安全性。
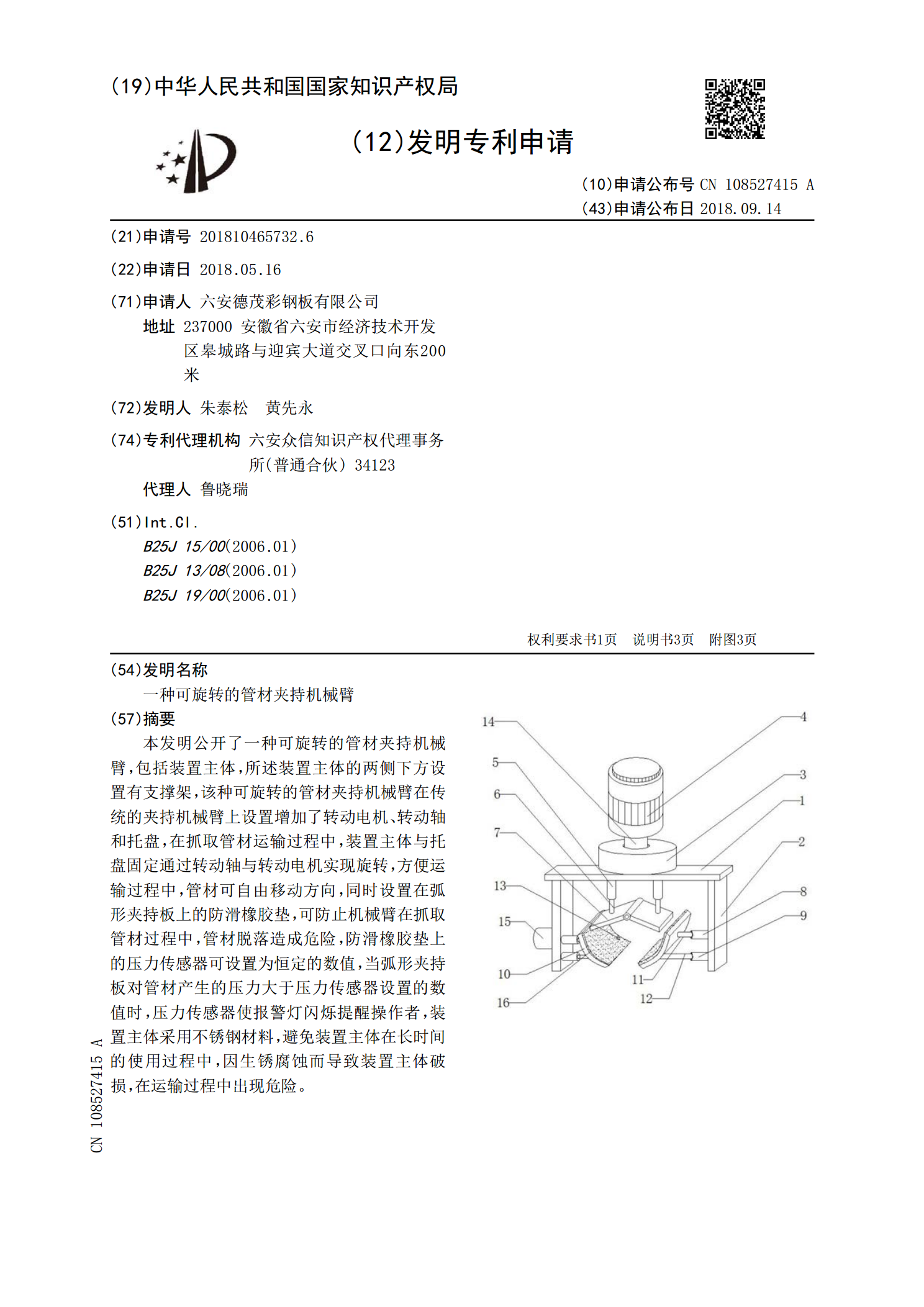
一种可旋转的管材夹持机械臂.pdf
本发明公开了一种可旋转的管材夹持机械臂,包括装置主体,所述装置主体的两侧下方设置有支撑架,该种可旋转的管材夹持机械臂在传统的夹持机械臂上设置增加了转动电机、转动轴和托盘,在抓取管材运输过程中,装置主体与托盘固定通过转动轴与转动电机实现旋转,方便运输过程中,管材可自由移动方向,同时设置在弧形夹持板上的防滑橡胶垫,可防止机械臂在抓取管材过程中,管材脱落造成危险,防滑橡胶垫上的压力传感器可设置为恒定的数值,当弧形夹持板对管材产生的压力大于压力传感器设置的数值时,压力传感器使报警灯闪烁提醒操作者,装置主体采用不锈