
一种数控四轴焊接机械手.pdf

新月****姐a

1/9
2/9

3/9

4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种数控四轴焊接机械手.pdf
本发明公开了一种数控四轴焊接机械手,包括底板和移动轮,所述底板下端设置移动轮,所述底板上端设有设备箱,所述设备箱上部设有升降台,所述升降台上端设有底座,所述底座活动连接驱动臂,所述驱动臂端部设有抢体。本具数控四轴焊接机械手在使用过程中,设备箱内的控制装置控制本数控四轴焊接机械手的运转,设置的升降台用来调整整体的高度,设置的焊丝放置架和传动架,通过驱动电机将焊丝由导丝孔导入到融化腔内,设置的气泵利用高压空气将融化的焊丝吹出,该数控四轴焊接机械手,调节工作稳定,方位调节迅速,焊丝在抢体内融化,避免焊丝弯折,保

一种数控四轴焊接机械手.pdf
本发明公开了一种数控四轴焊接机械手,包括底板、放置台、左右调节机构、前后调节机构、角度调节机构和焊接头;所述角度调节机构与焊接头连接且固定在前后调节机构上,所述角度调节机构包括安装杆、蜗轮、蜗杆和套环,安装杆固定在前后调节机构上且其安装杆的端部套设有套环,安装杆上远离套环的一端安装有蜗轮,蜗轮的下方啮合有蜗杆,蜗杆与转动安装在安装杆内腔的柱形杆固定连接。本发明设计新颖,蜗轮转动时通过蜗杆带动柱形杆转动,同时由于蜗轮和蜗杆的自锁效应,蜗杆无法带动蜗轮1转动,蜗杆转动时通过柱形杆带动焊接头进行角度调节,从而实
一种数控四轴焊接机械手.pdf
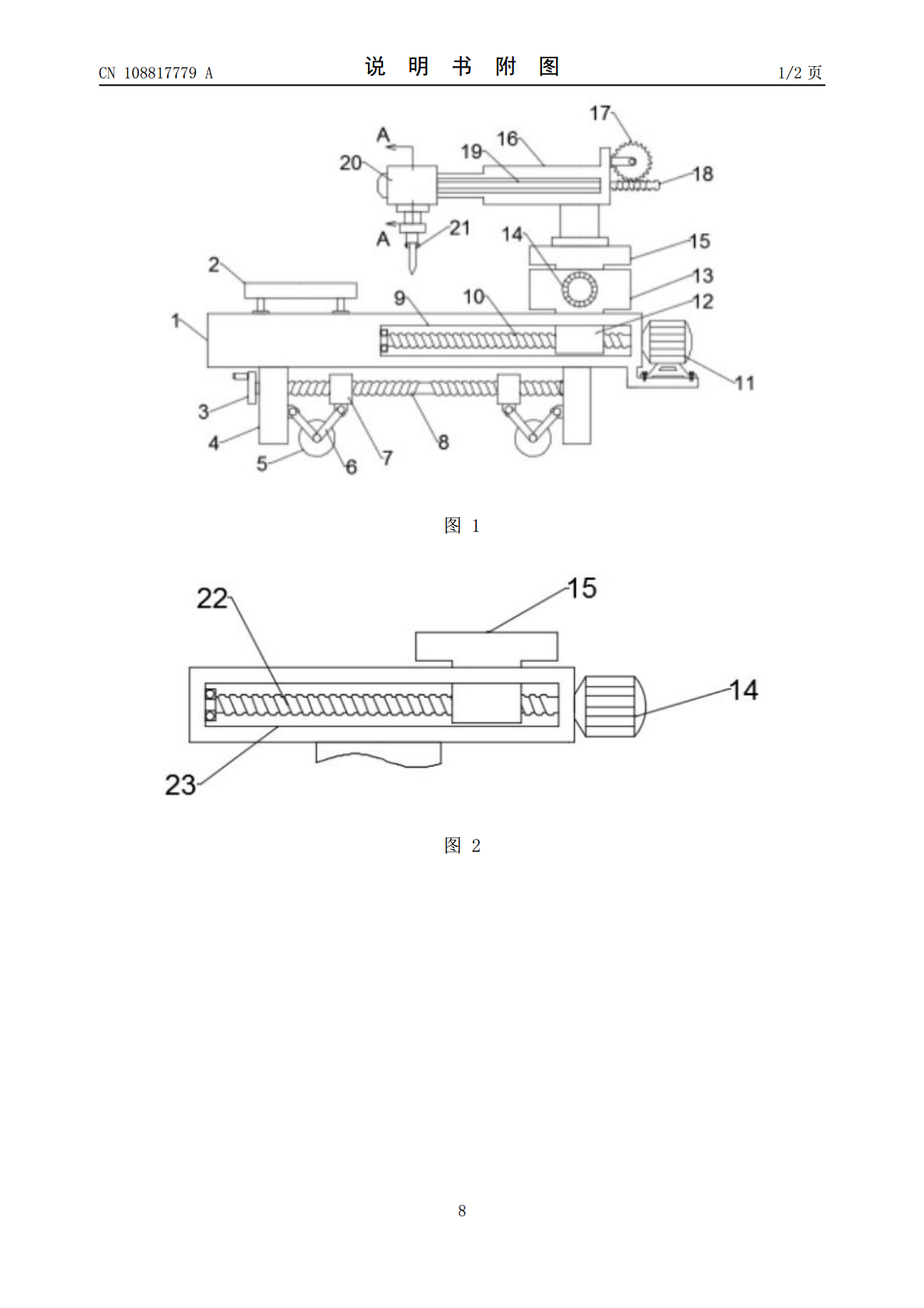
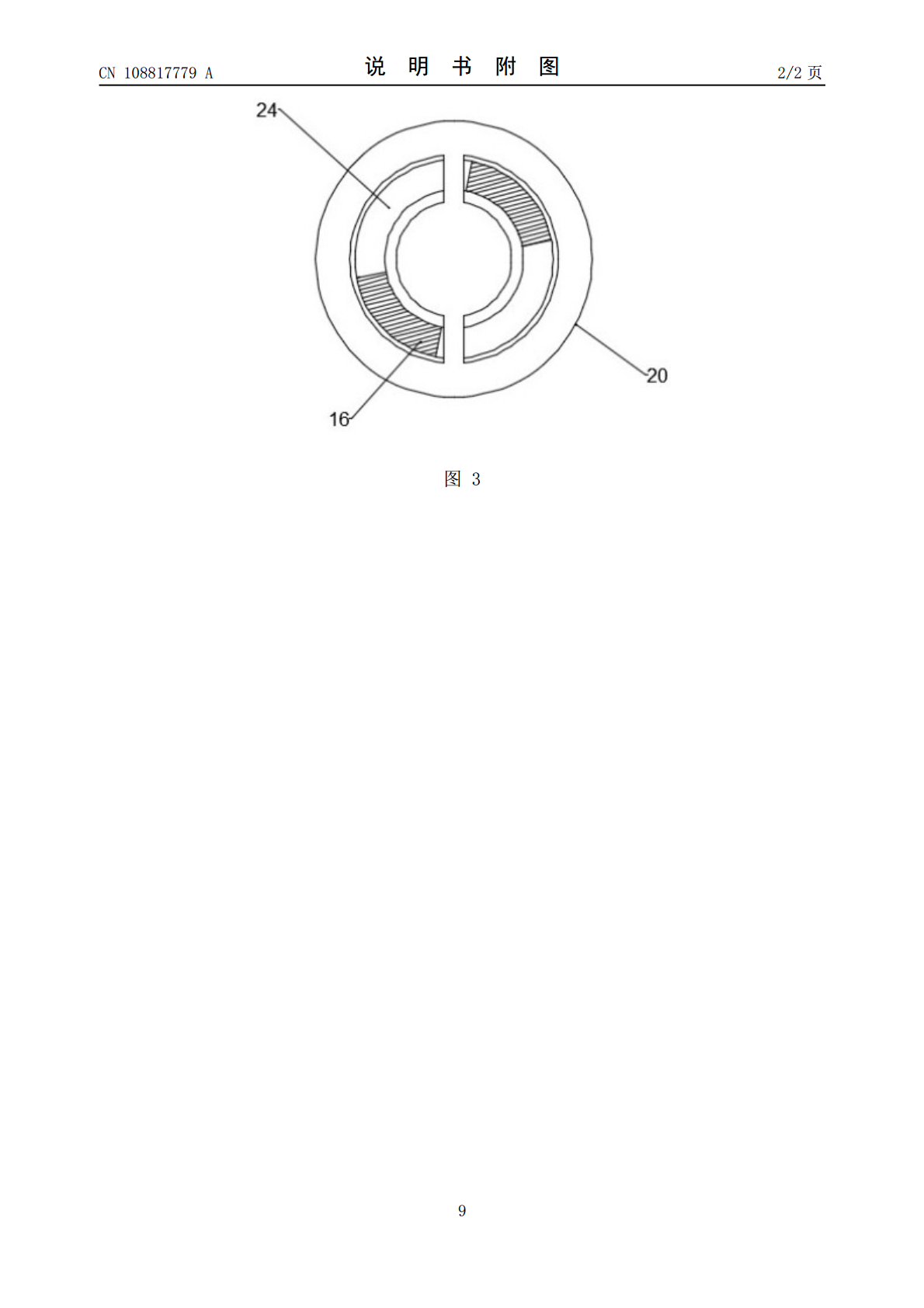
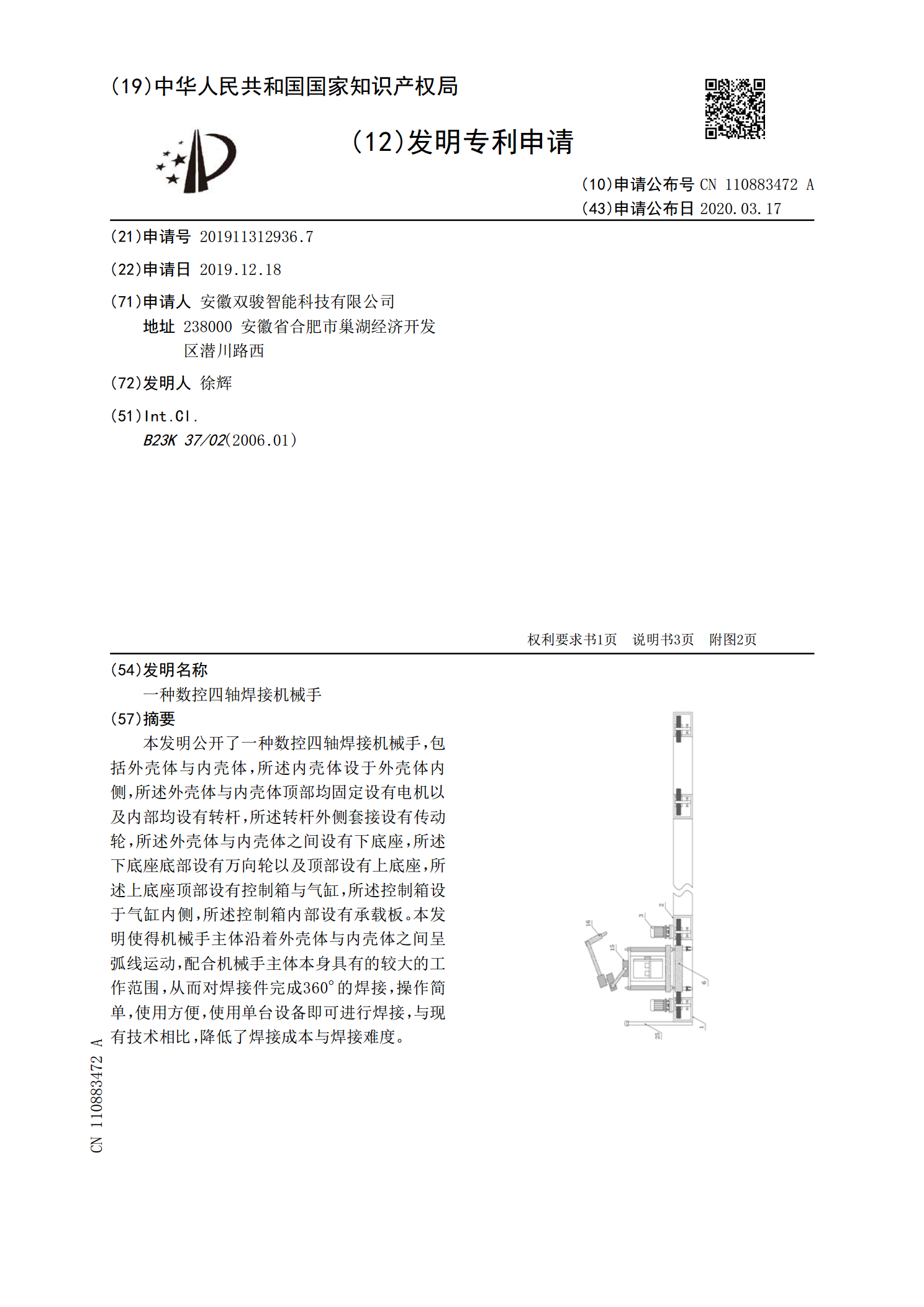
本发明公开了一种数控四轴焊接机械手,包括外壳体与内壳体,所述内壳体设于外壳体内侧,所述外壳体与内壳体顶部均固定设有电机以及内部均设有转杆,所述转杆外侧套接设有传动轮,所述外壳体与内壳体之间设有下底座,所述下底座底部设有万向轮以及顶部设有上底座,所述上底座顶部设有控制箱与气缸,所述控制箱设于气缸内侧,所述控制箱内部设有承载板。本发明使得机械手主体沿着外壳体与内壳体之间呈弧线运动,配合机械手主体本身具有的较大的工作范围,从而对焊接件完成360°的焊接,操作简单,使用方便,使用单台设备即可进行焊接,与现有技术相

一种四轴法线数控焊接机.pdf
本发明公开了一种四轴法线数控焊接机,包括机座总成、顶紧总成、气缸、托架总成、焊接运动总称、焊枪总成、装夹总成和主轴箱,所述活动顶尖设于顶紧总成的左端,所述托架总成包括滚轮、蜗轮升降机构,所述托架总成设于机座总成的顶部,且托架总成与导轨相连接,所述焊接运动总称固定安装于机座总成的顶部,所述送丝机构设于焊接运动总称的顶部,且送丝机构与焊枪总成相连接,所述焊接运动总称的顶部设有伺服电机,所述伺服电机与旋转箱相连接,所述主轴箱固定安装于机座总成的顶部左端。该四轴法线数控焊接机结构简单新颖,实用性强,可广泛应用于液
四轴焊接机械手.pdf
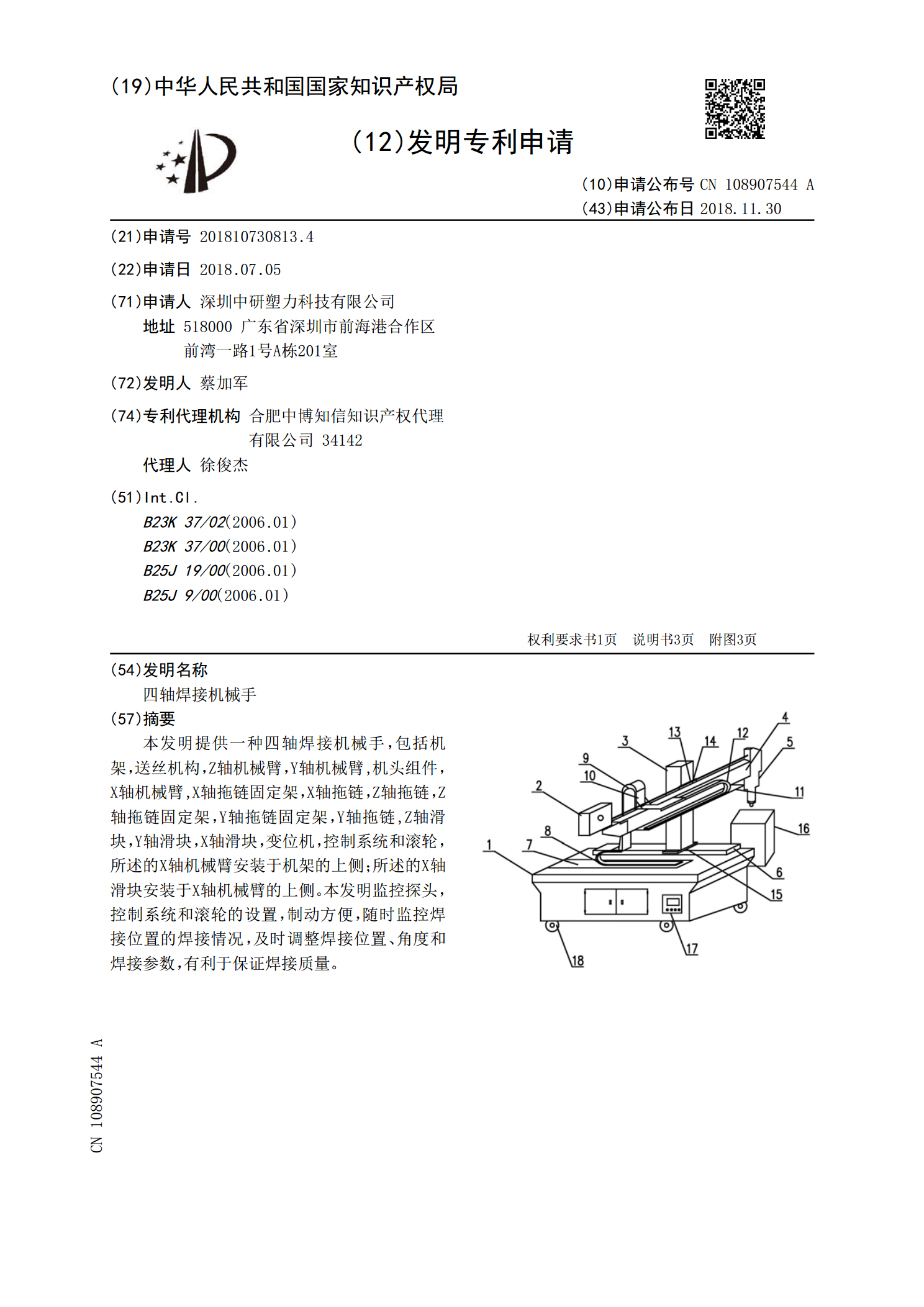
本发明提供一种四轴焊接机械手,包括机架,送丝机构,Z轴机械臂,Y轴机械臂,机头组件,X轴机械臂,X轴拖链固定架,X轴拖链,Z轴拖链,Z轴拖链固定架,Y轴拖链固定架,Y轴拖链,Z轴滑块,Y轴滑块,X轴滑块,变位机,控制系统和滚轮,所述的X轴机械臂安装于机架的上侧;所述的X轴滑块安装于X轴机械臂的上侧。本发明监控探头,控制系统和滚轮的设置,制动方便,随时监控焊接位置的焊接情况,及时调整焊接位置、角度和焊接参数,有利于保证焊接质量。