
空间分布信息的确定,及空间分布信息的复原方法和装置.pdf

波峻****99


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空间分布信息的确定,及空间分布信息的复原方法和装置.pdf
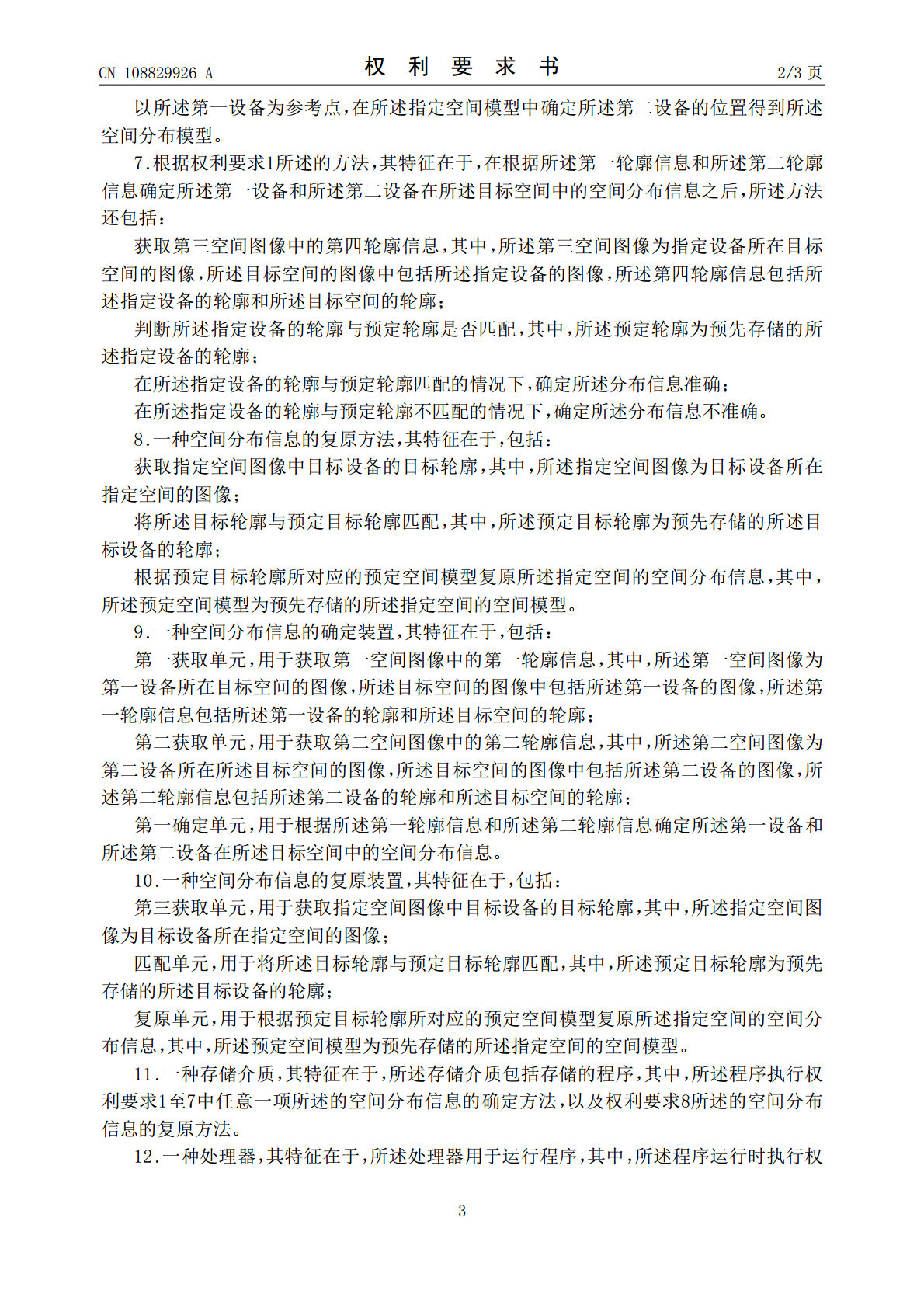
本发明公开了一种空间分布信息的确定,及空间分布信息的复原方法和装置。其中,该方法包括:获取第一空间图像中的第一轮廓信息,其中,第一空间图像为第一设备所在目标空间的图像,目标空间的图像中包括第一设备的图像,第一轮廓信息包括第一设备的轮廓和目标空间的轮廓;获取第二空间图像中的第二轮廓信息,其中,第二空间图像为第二设备所在目标空间的图像,目标空间的图像中包括第二设备的图像,第二轮廓信息包括第二设备的轮廓和目标空间的轮廓;根据第一轮廓信息和第二轮廓信息确定第一设备和第二设备在目标空间中的空间分布信息。本发明解决了
用于预设空间关系信息确定的方法和装置.pdf
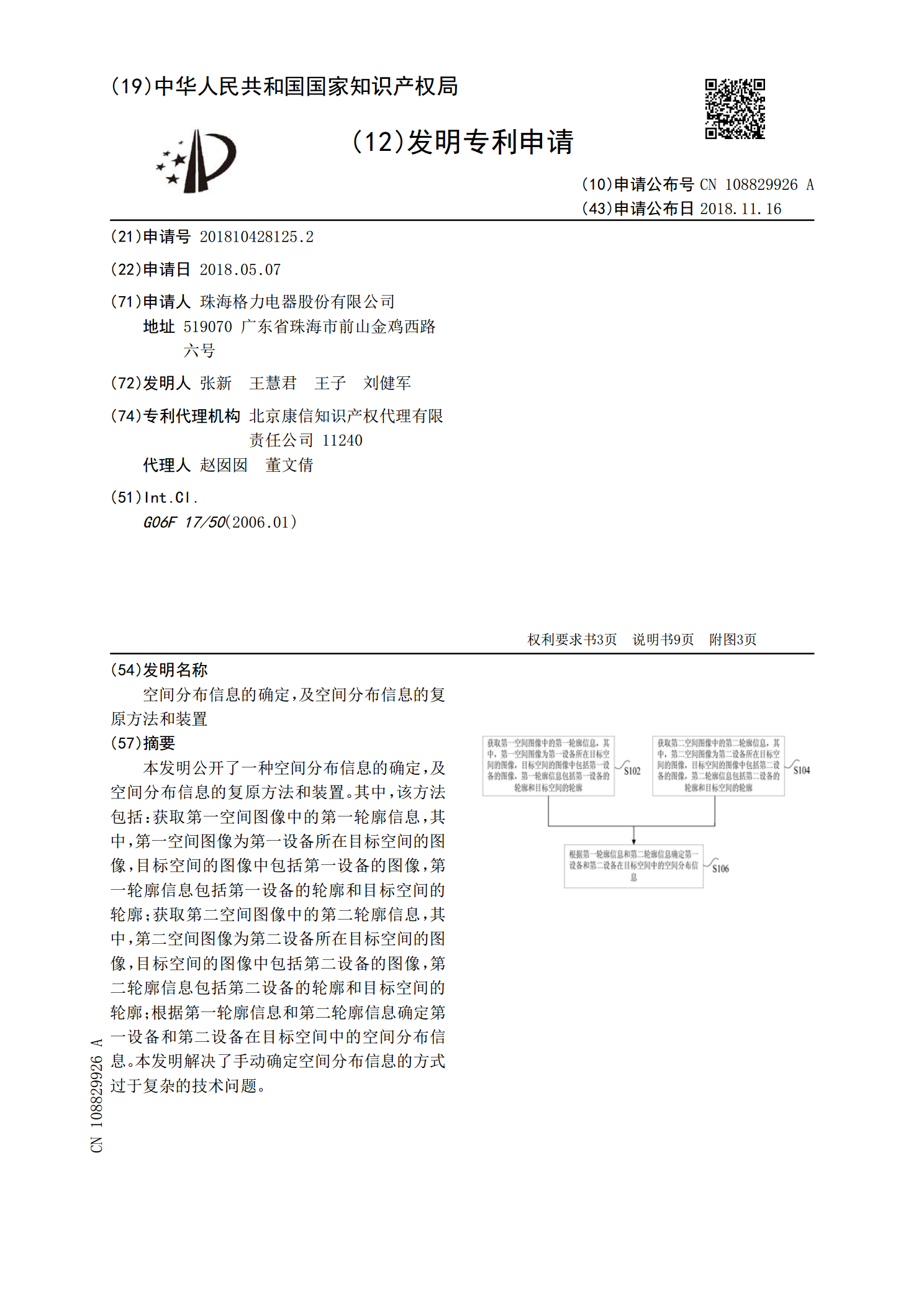
一种由用户设备(UE)执行的方法,包括从小区接收配置信令,该配置信令在活动上行链路带宽部分上为UE配置一个或多个物理上行链路控制信道资源,一个或多个物理上行链路控制信道资源未配置有物理上行链路控制信道‑空间关系信息,配置信令,指示启用下行控制信息格式0_0调度的物理上行共享信道传输的预设空间关系行为。从小区接收活动下行链路带宽部分上的下行控制信息格式0_0,下行控制信息格式0_0提供物理上行共享信道的调度信息;以及根据在小区的活动下行链路带宽部分上的预定控制资源集的准协同定位假设对应的准协同定位‑类型D参
一种基于分布式的信息融合空间目标轨道确定方法.pdf
本发明涉及轨道确定技术领域,并公开了一种基于分布式的信息融合空间目标轨道确定方法,包括,步骤S1,信息采集,在分布式网络数据库中搜集和提取空间目标相关的信息项,并进行格式转换;步骤S2,信息辨识,针对步骤S1提取的信息进行辨识,去伪存真;步骤S3,基于步骤S2辨识后的数据建立空间目标最优稀疏参数模型;步骤S4,信息融合,基于多结构多参数非线性一体化融合模型进行信息融合;步骤S5,基于步骤S4的融合模型进行空间目标非线性参数估计;步骤S6,目标定轨,基于步骤S5的空间目标非线性参数进行空间目标轨道确定,本发

红树林空间分布信息遥感提取方法.docx
红树林空间分布信息遥感提取方法标题:红树林空间分布信息遥感提取方法摘要:红树林是一种特殊的海岸生态系统,对维护海洋生态平衡和保护海岸线具有重要作用。准确提取红树林的空间分布信息对于环境监测和管理至关重要。遥感技术提供了一种快速、高效、经济的方法来获取大范围的地理信息。本文旨在综述当前红树林空间分布信息遥感提取方法的研究进展,包括数据源选择、图像预处理、特征提取和分类等关键步骤。此外,还阐述了存在的挑战和未来的研究方向,以期为红树林的保护与管理提供参考。关键词:红树林,空间分布信息,遥感,提取方法1.引言海

温室环境空间分布预测方法及装置.pdf
本发明提供一种温室环境空间分布预测方法及装置,该方法包括:根据预测点当前及之前时刻的多组环境特征,确定包括多组时间序列特征的特征向量矩阵,环境特征包括温室内环境特征和温室外环境特征;将特征向量矩阵,输入到已训练的预测模型的卷积网络进行特征提取,得到提取后的全局特征向量;将全局特征向量输入预测模型的时间序列网络,输出预设时长后的温湿度、光照强度和二氧化碳含量预测结果。该方法可对温室小气候环境数据大滞后性、时序性、非线性、空间分布差异性的特征进行准确挖掘,结合卷积网络和时间序列网络更好的挖掘时间相关性,从而能