
一种离心式真空灌胶装置及其工作方法.pdf

一只****ua


1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种离心式真空灌胶装置及其工作方法.pdf
本发明公开了一种离心式真空灌胶装置,包括灌胶工作台和设置在灌胶工作台上的一组夹持装置,所述夹持装置包括与灌胶工作台转动连接的基座,以及设置在基座空腔内的一组夹持部;所述基座下端设有向外凸起的传动齿轮部,所述相邻夹持装置的传动齿轮部相啮合;所述夹持装置下方设有送料取料装置,上方设有真空灌胶装置。通过旋转产生的离心力使胶体充分进入空腔的各个角落,提高了灌胶质量;一组夹持装置通过自身设置的传动齿轮部传动并同时旋转,节省驱动装置的数量,降低成本;一组线束接头同时从灌胶工作台下方送入夹持装置,并同时灌胶处理,提高了
一种用于线束接头灌胶的离心式灌胶装置及其工作方法.pdf
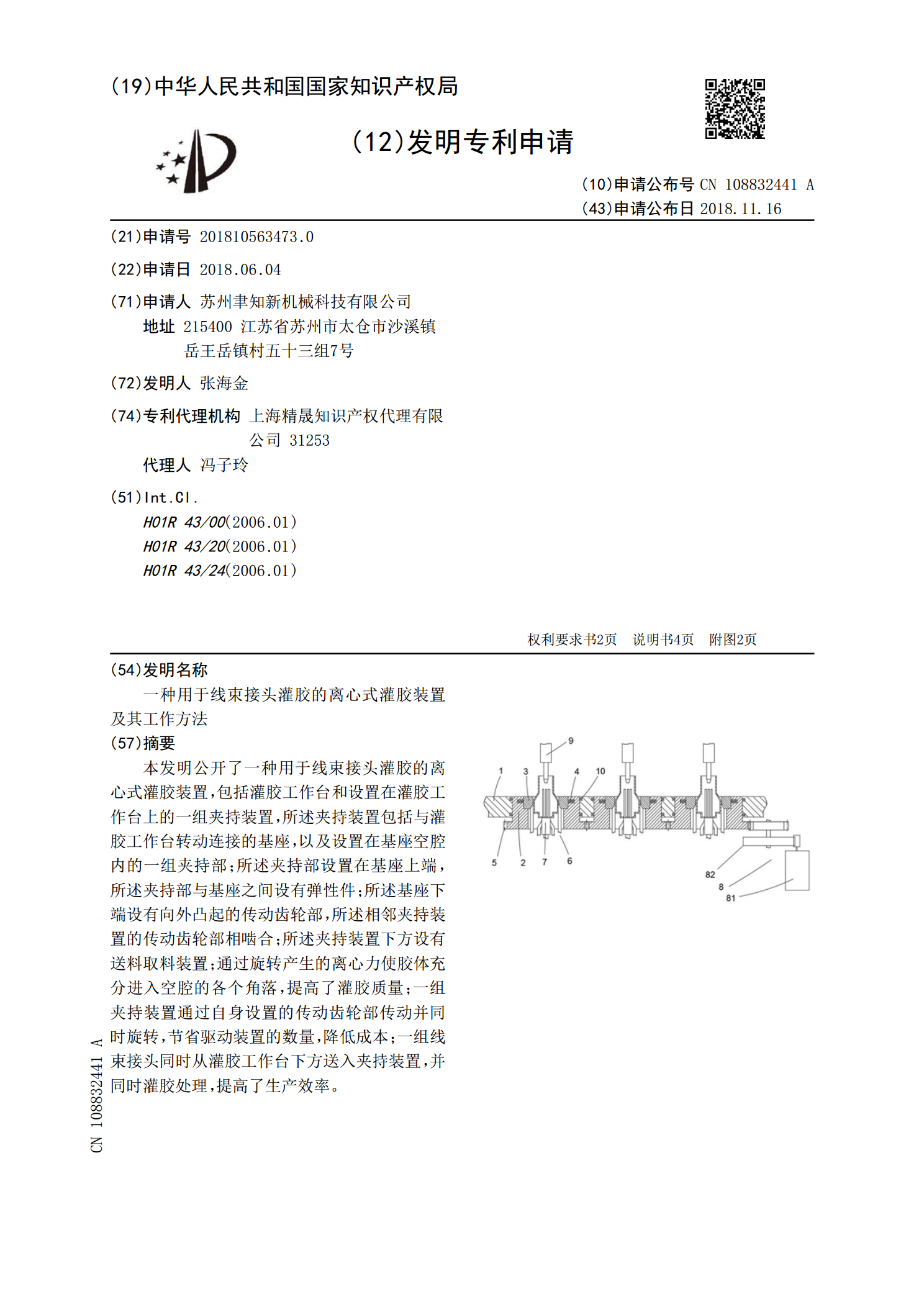
本发明公开了一种用于线束接头灌胶的离心式灌胶装置,包括灌胶工作台和设置在灌胶工作台上的一组夹持装置,所述夹持装置包括与灌胶工作台转动连接的基座,以及设置在基座空腔内的一组夹持部;所述夹持部设置在基座上端,所述夹持部与基座之间设有弹性件;所述基座下端设有向外凸起的传动齿轮部,所述相邻夹持装置的传动齿轮部相啮合;所述夹持装置下方设有送料取料装置;通过旋转产生的离心力使胶体充分进入空腔的各个角落,提高了灌胶质量;一组夹持装置通过自身设置的传动齿轮部传动并同时旋转,节省驱动装置的数量,降低成本;一组线束接头同时从
一种灌胶装置及灌胶方法.pdf
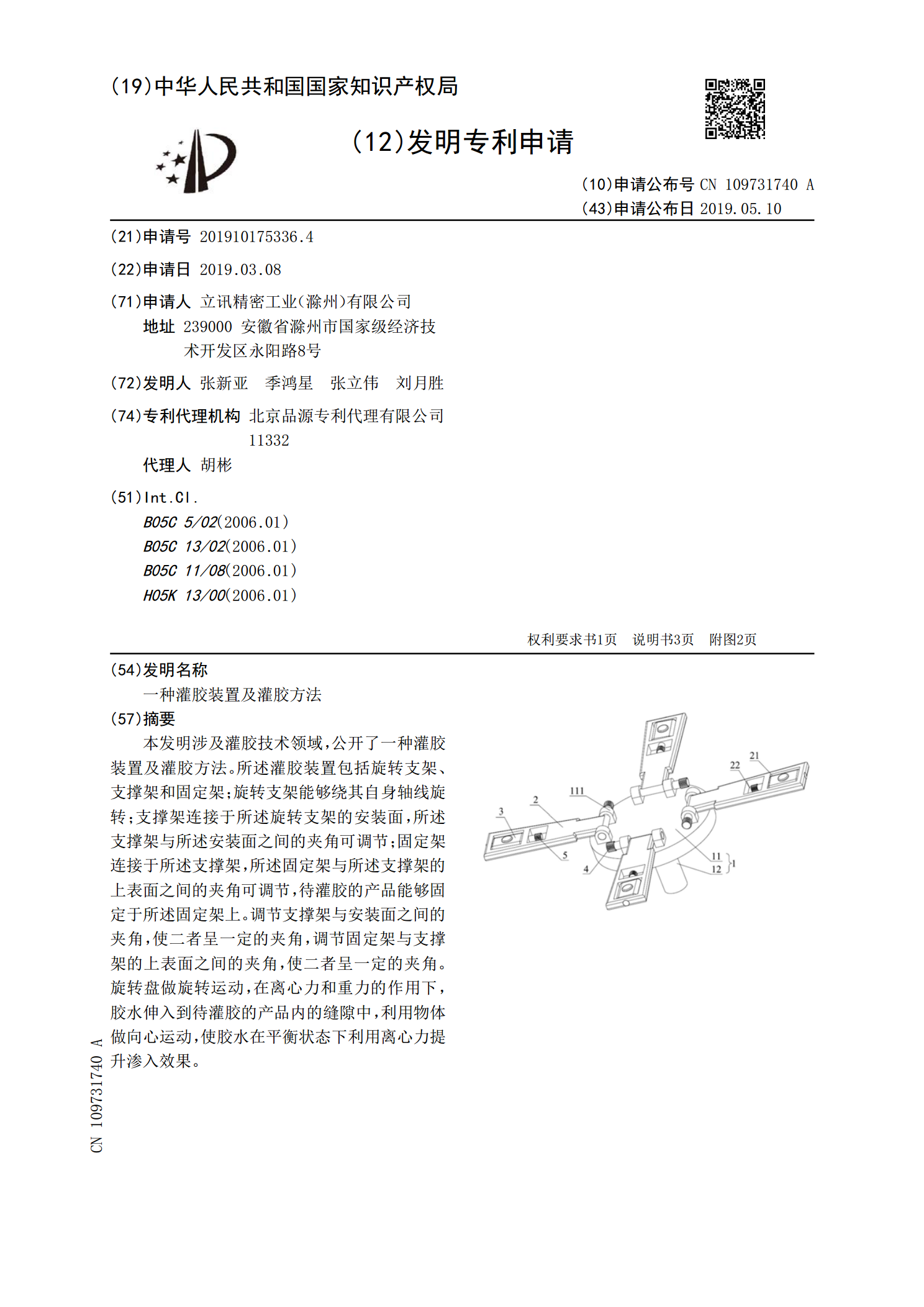
本发明涉及灌胶技术领域,公开了一种灌胶装置及灌胶方法。所述灌胶装置包括旋转支架、支撑架和固定架;旋转支架能够绕其自身轴线旋转;支撑架连接于所述旋转支架的安装面,所述支撑架与所述安装面之间的夹角可调节;固定架连接于所述支撑架,所述固定架与所述支撑架的上表面之间的夹角可调节,待灌胶的产品能够固定于所述固定架上。调节支撑架与安装面之间的夹角,使二者呈一定的夹角,调节固定架与支撑架的上表面之间的夹角,使二者呈一定的夹角。旋转盘做旋转运动,在离心力和重力的作用下,胶水伸入到待灌胶的产品内的缝隙中,利用物体做向心运动
一种灌胶装置的自动送料取料机械手及其工作方法.pdf
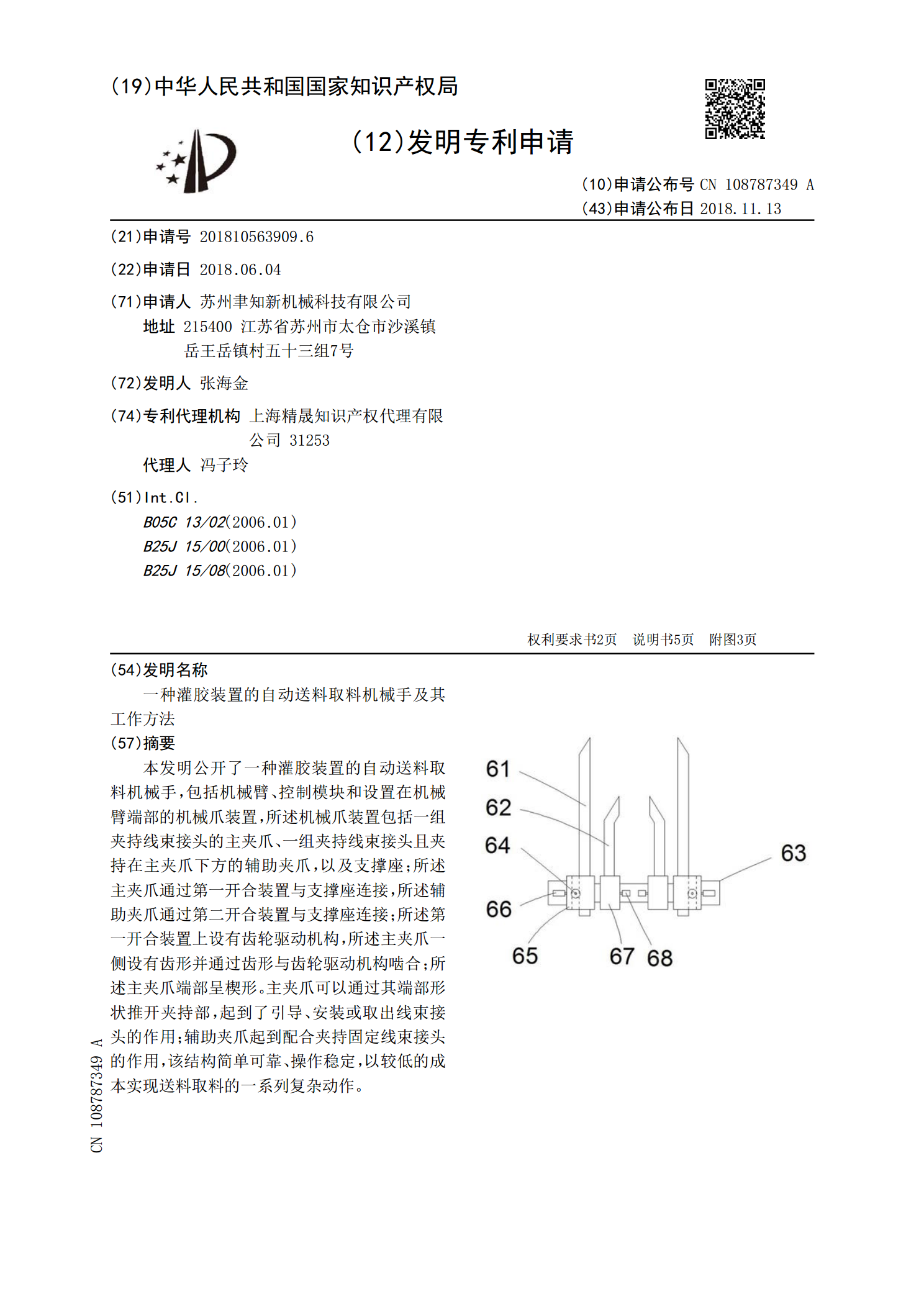
本发明公开了一种灌胶装置的自动送料取料机械手,包括机械臂、控制模块和设置在机械臂端部的机械爪装置,所述机械爪装置包括一组夹持线束接头的主夹爪、一组夹持线束接头且夹持在主夹爪下方的辅助夹爪,以及支撑座;所述主夹爪通过第一开合装置与支撑座连接,所述辅助夹爪通过第二开合装置与支撑座连接;所述第一开合装置上设有齿轮驱动机构,所述主夹爪一侧设有齿形并通过齿形与齿轮驱动机构啮合;所述主夹爪端部呈楔形。主夹爪可以通过其端部形状推开夹持部,起到了引导、安装或取出线束接头的作用;辅助夹爪起到配合夹持固定线束接头的作用,该结

一种磁轨制动器用全自动真空灌胶装置.pdf
本发明公开了一种磁轨制动器用全自动真空灌胶装置,包括储胶桶,所述储胶桶连接有磁轨制动器上的进胶孔,所述磁轨制动器上的出胶孔连接有真空泵;所述储胶桶内设置有液位传感器,所述进胶孔入口设置有真空传感器一,所述出胶孔与所述真空泵之间依次设置有溢胶检测装置和真空传感器二;所述液位传感器、所述真空传感器一、所述真空传感器二和所述溢胶检测装置均连接有数据采集模块,所述数据采集模块连接有PLC,所述PLC连接有上位机。本发明提高了灌封质量:真空灌胶时磁轨内部处于真空状态,几乎无空气残留,可以减少气泡、空穴等灌封缺陷;真