
采用微齿驱动的大行程压电直线作动器及作动方法.pdf

雨巷****珺琦


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

采用微齿驱动的大行程压电直线作动器及作动方法.pdf
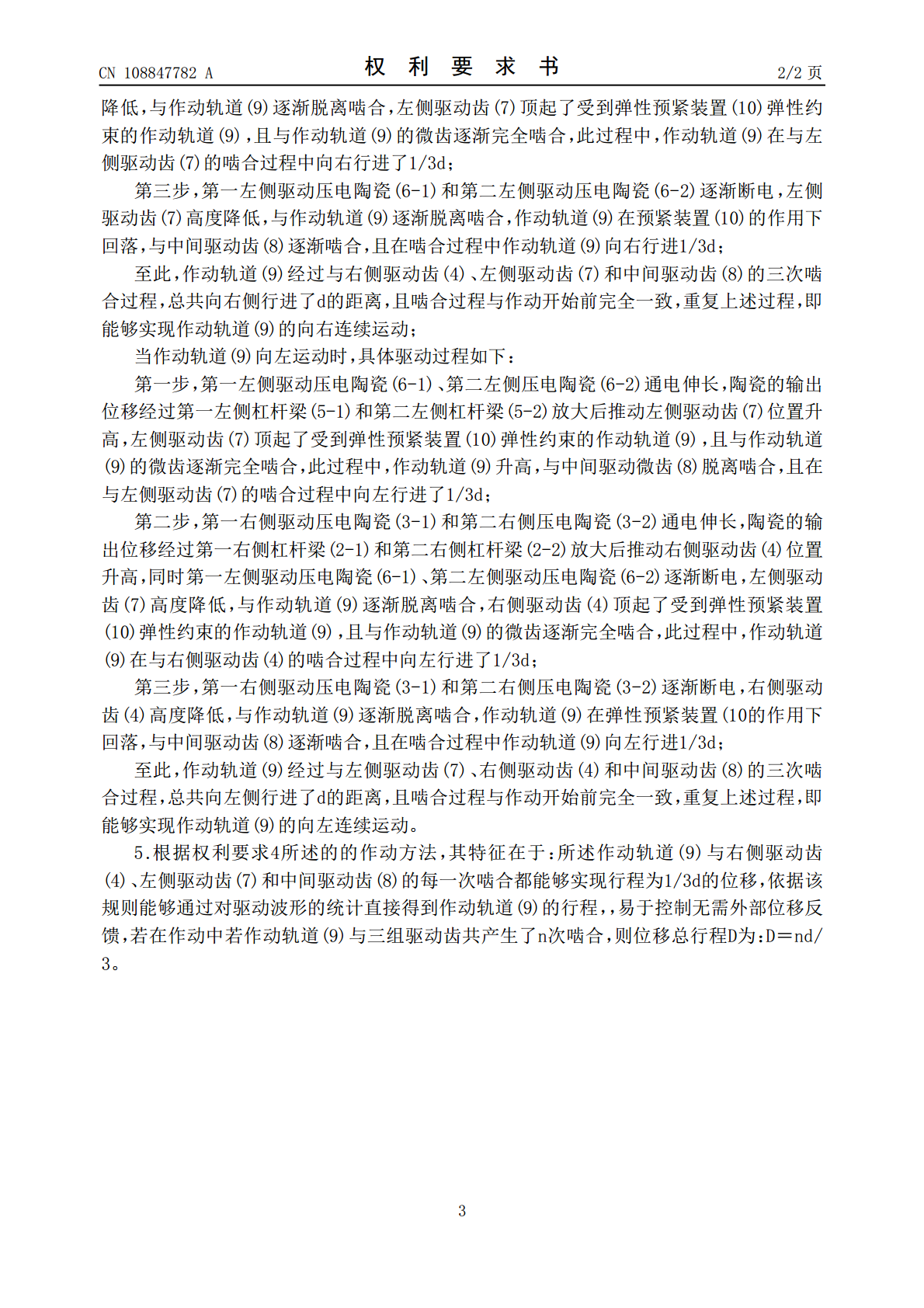
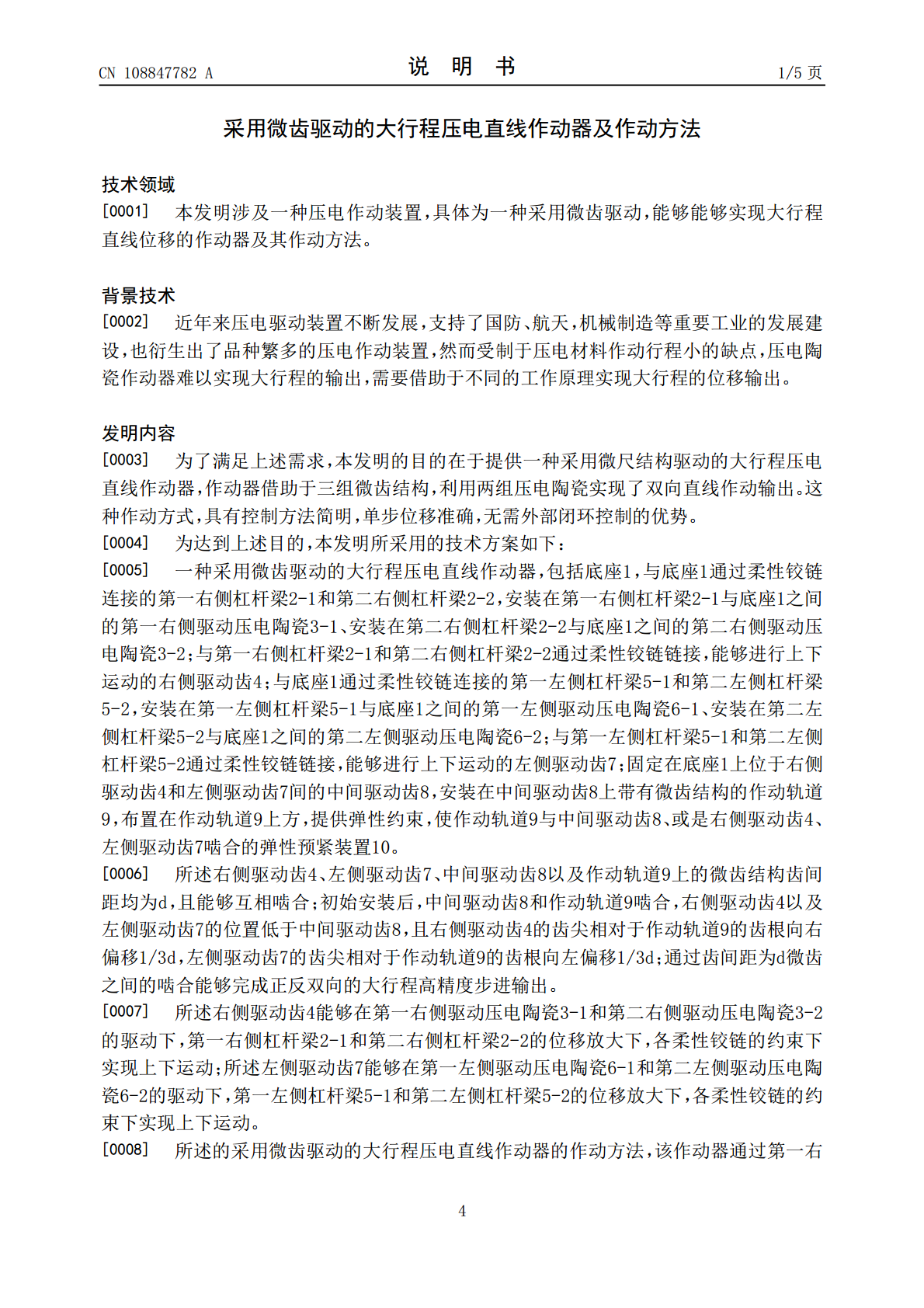
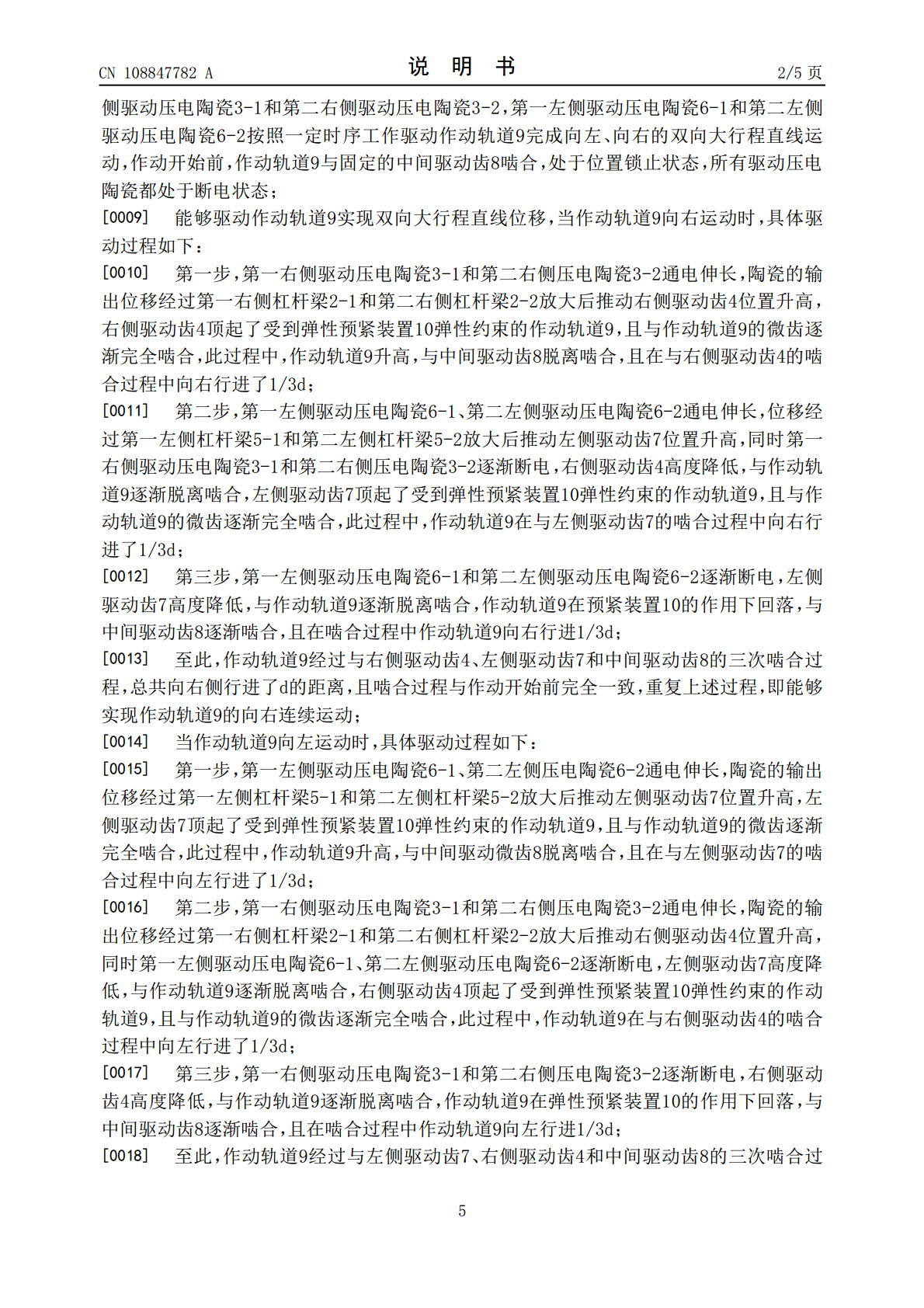
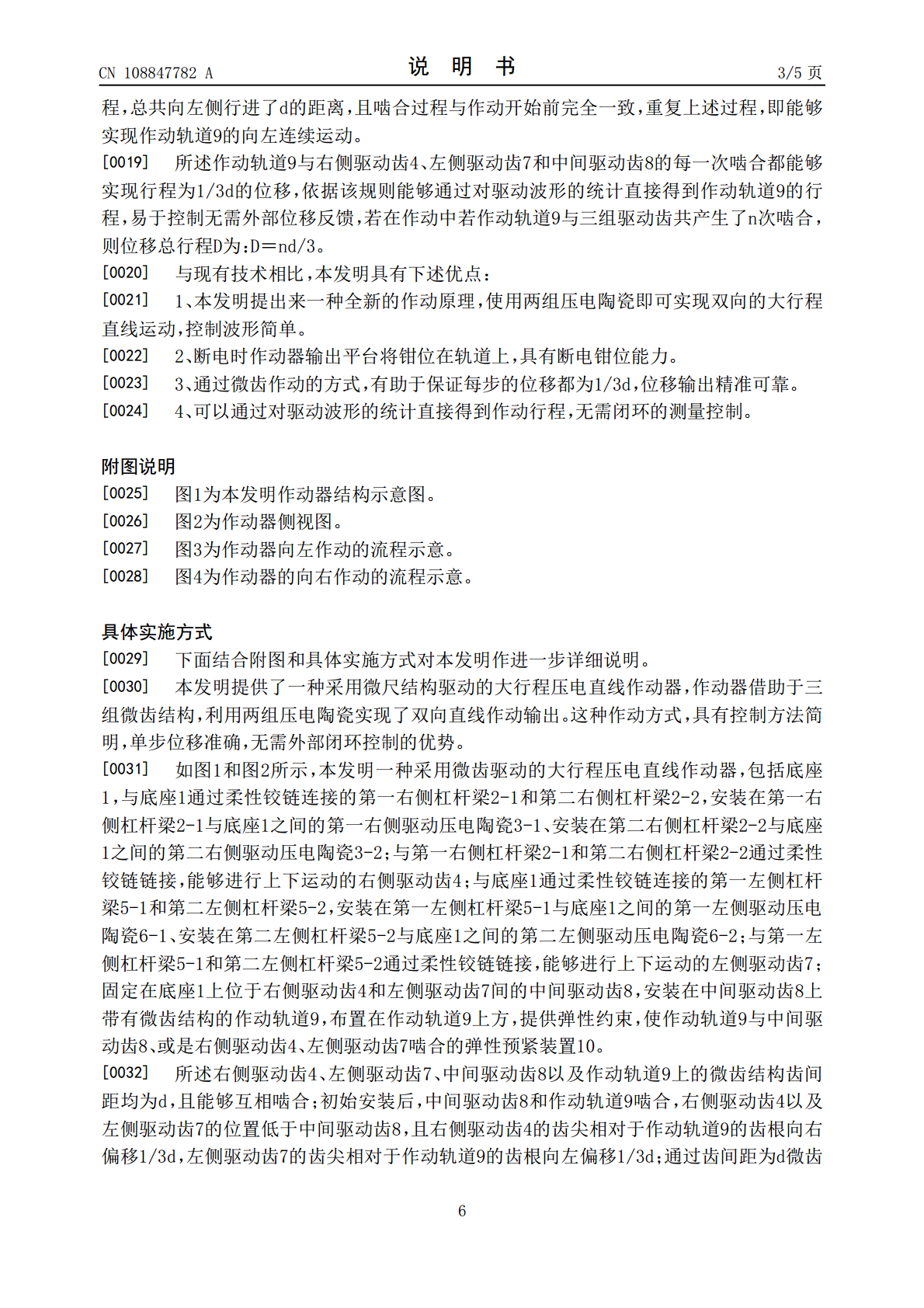
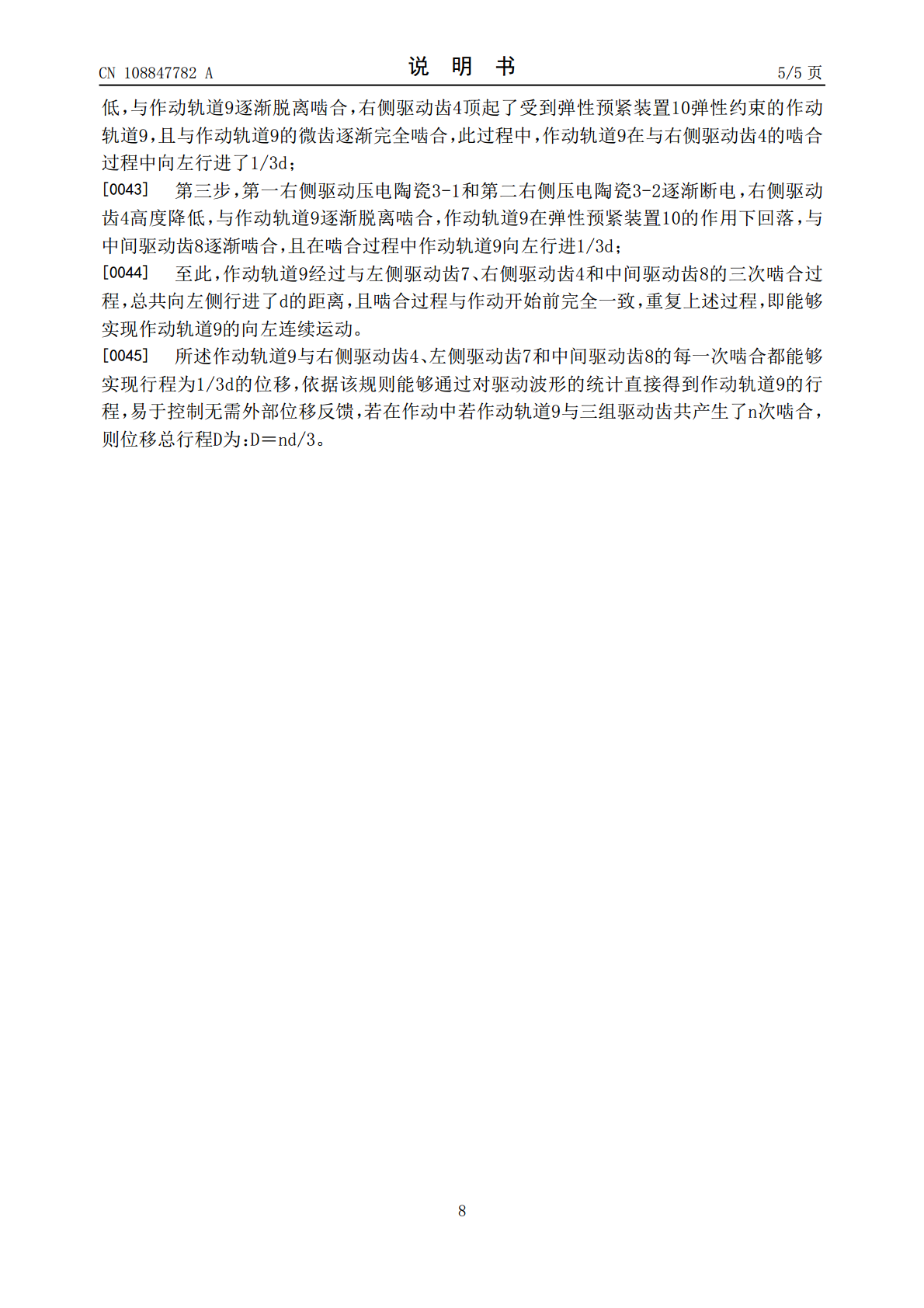
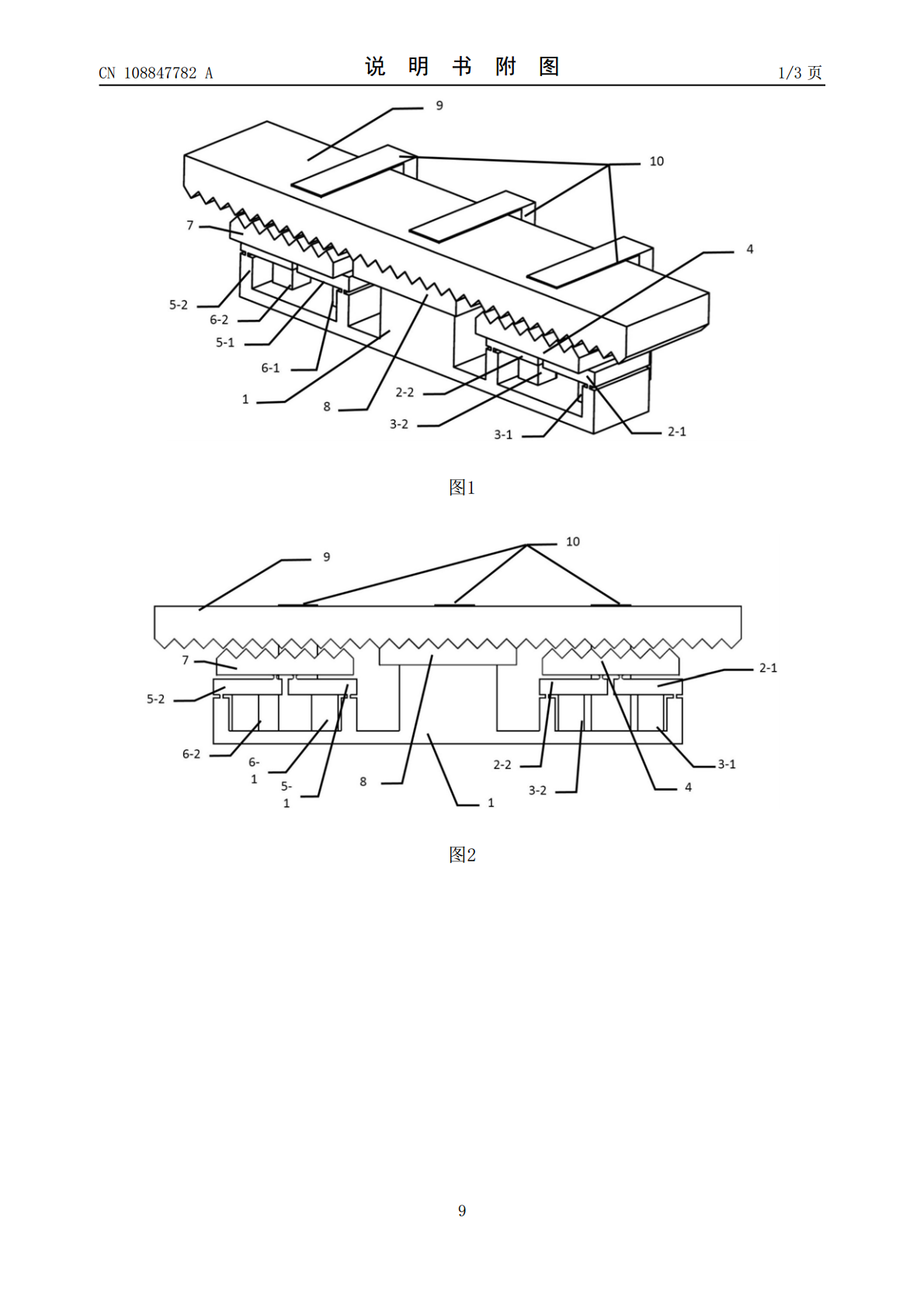
采用微齿驱动的大行程压电直线作动及作动方法,该作动器主要包括带有微齿结构的作动轨道,以及可以分别与作动轨道啮合,安装后相互存在相位差的三组驱动齿,控制驱动齿上下运动的压电陶瓷及其位移放大结构,以及约束作动轨道与驱动齿相互啮合的弹性预紧装置组成;该作动器通过带有相位差的驱动齿与作动轨道轮流啮合驱动作动轨道完成双向直线位移的输出,每次的啮合都可以将作动轨道推动1/3的齿间距行程;该作动器使用微齿结构实现大行程的位移输出,具有输出行程大,钳位可靠,控制简单,易于闭环控制的特点。

含力与位移双传感的直线式压电作动器及其作动方法.pdf
本发明公开了含力与位移双传感的直线式压电作动器及其作动方法,该作动器自上而下由质心位于同一直线的力传感部件,位移传感部件,作动部件组成,力传感部件由限位层、力传感柔性帽、力霍尔元件、永磁体及磁铁支撑架构成,位移传感部件由位移霍尔元件,与力传感部件共用的永磁体与磁铁支撑架构成,作动部件由圆柱外壳、调节螺钉、弹性钳位单元、椭圆环、压电堆、作动块构成;力传感部件螺纹固接于圆柱外壳,位移霍尔元件粘接于作动部件上方;本发明结构紧凑,断电锁止,钳位力可调节,采用比例式线性霍尔传感器感知输出力与位移,基于惯性式作动原理
螺旋箝位双向大推力压电直线作动器研究.pptx
汇报人:/目录01定义与工作原理结构特点与优势应用领域与前景02研究背景研究意义研究现状与进展03研究内容研究方法实验设计与步骤04实验结果结果分析性能评估与优化05研究结论研究不足与展望未来研究方向汇报人:

低电压驱动的旋转型压电作动器研究.doc
低电压驱动的旋转型压电作动器研究随着电子科技的蓬勃发展,尖端设备的发展越来越趋于高度集成化与小型化。其中,在运动执行机构方面,压电作动器因为具备结构简单紧凑,能量密度高且不受电磁干扰等特点,十分适于整合到小型机电系统当中。然而,由于压电器件中压电陶瓷的场致应变非常小,使得绝大多数的压电作动器件需要较高的驱动电压,高电压驱动使压电作动器的应用领域受到极大限制,严重制约了其在诸多领域内的综合性应用。比如,在航空航天领域中,降低压电作动器的驱动电压可有效地减轻电源的质量和减少火灾隐患。与此同时,将压电作动器驱动

低电压驱动的旋转型压电作动器研究.doc
低电压驱动的旋转型压电作动器研究随着电子科技的蓬勃发展,尖端设备的发展越来越趋于高度集成化与小型化。其中,在运动执行机构方面,压电作动器因为具备结构简单紧凑,能量密度高且不受电磁干扰等特点,十分适于整合到小型机电系统当中。然而,由于压电器件中压电陶瓷的场致应变非常小,使得绝大多数的压电作动器件需要较高的驱动电压,高电压驱动使压电作动器的应用领域受到极大限制,严重制约了其在诸多领域内的综合性应用。比如,在航空航天领域中,降低压电作动器的驱动电压可有效地减轻电源的质量和减少火灾隐患。与此同时,将压电作动器驱动