
一种柔性膝关节外骨骼.pdf

灵波****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种柔性膝关节外骨骼.pdf
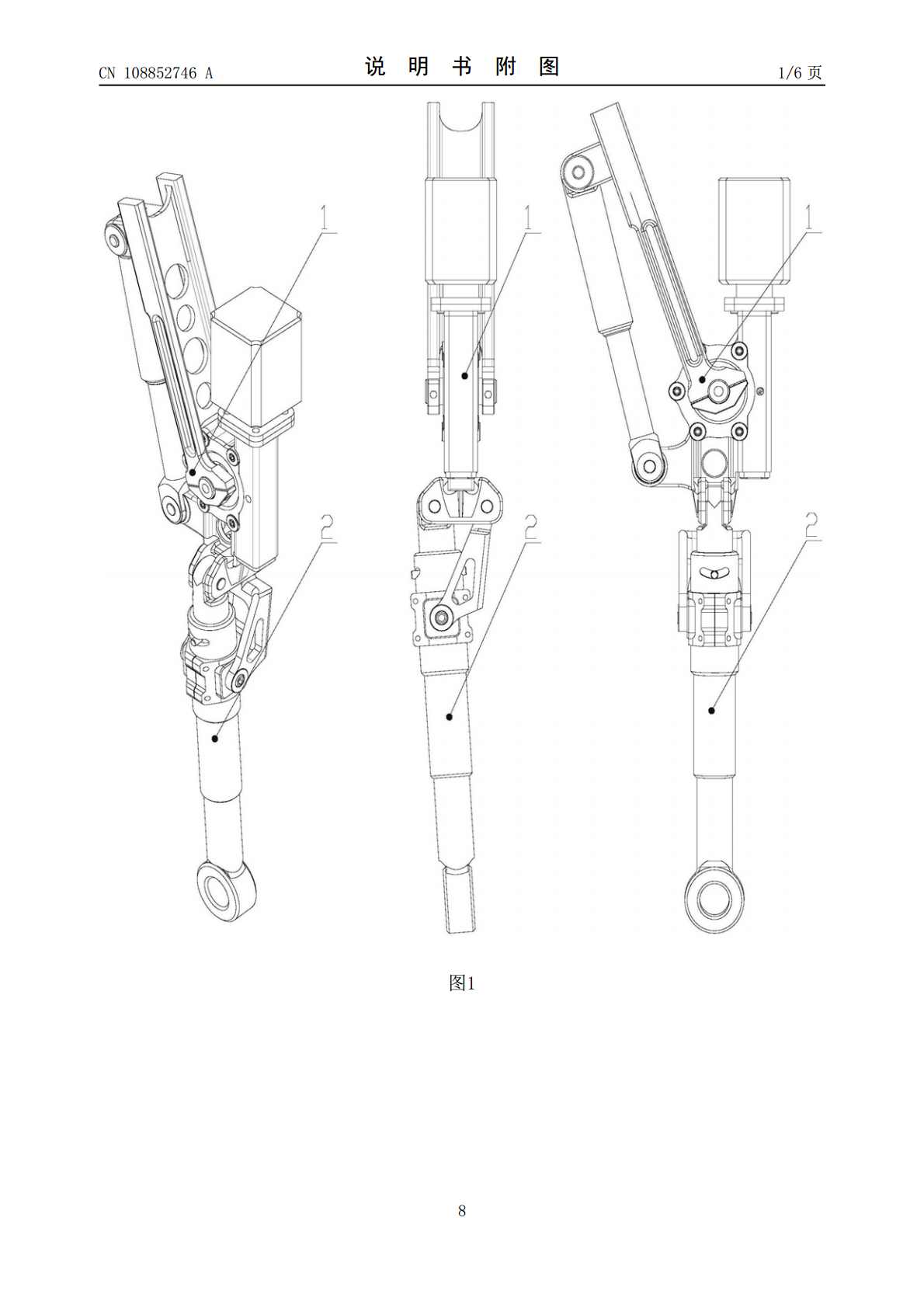
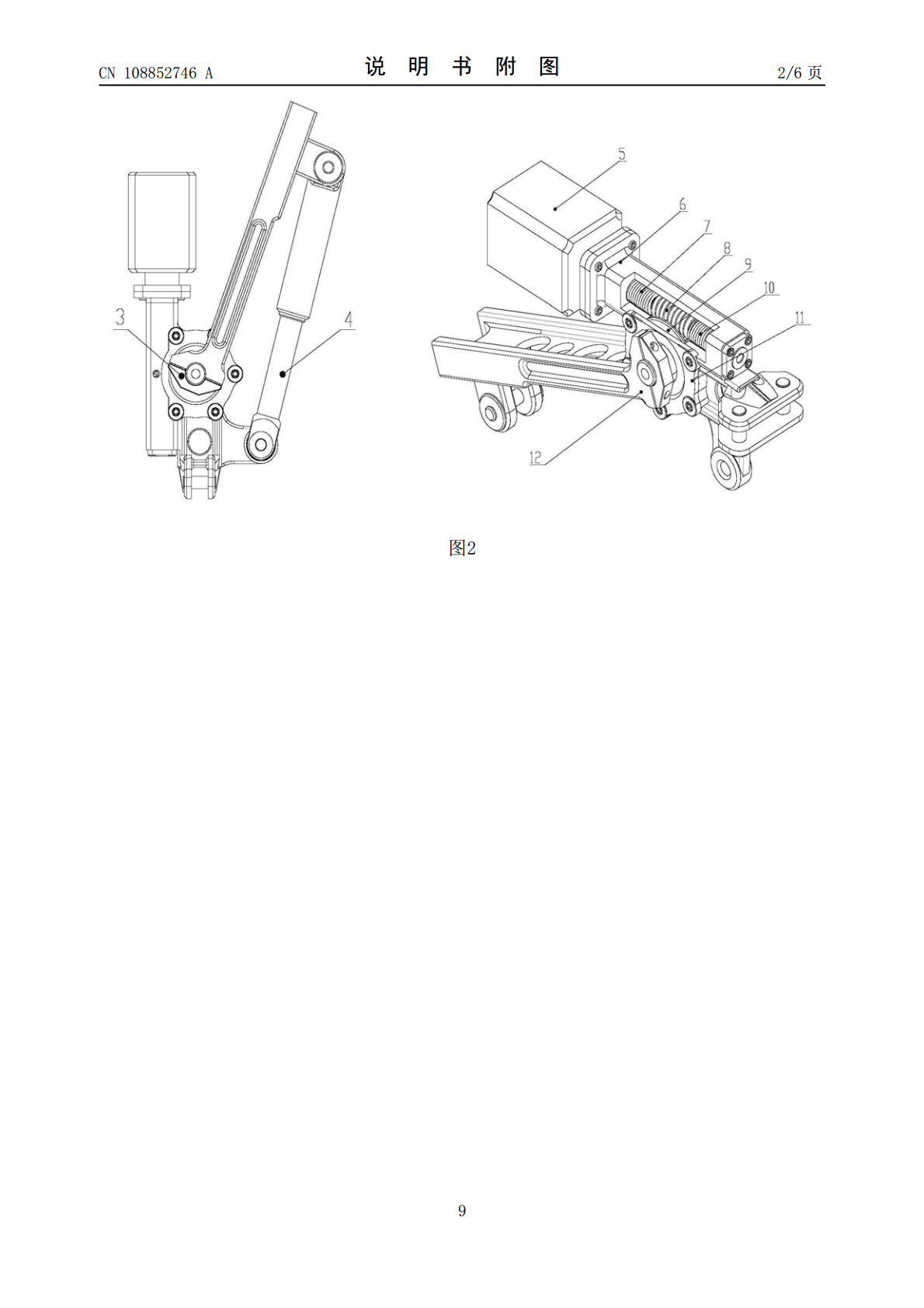
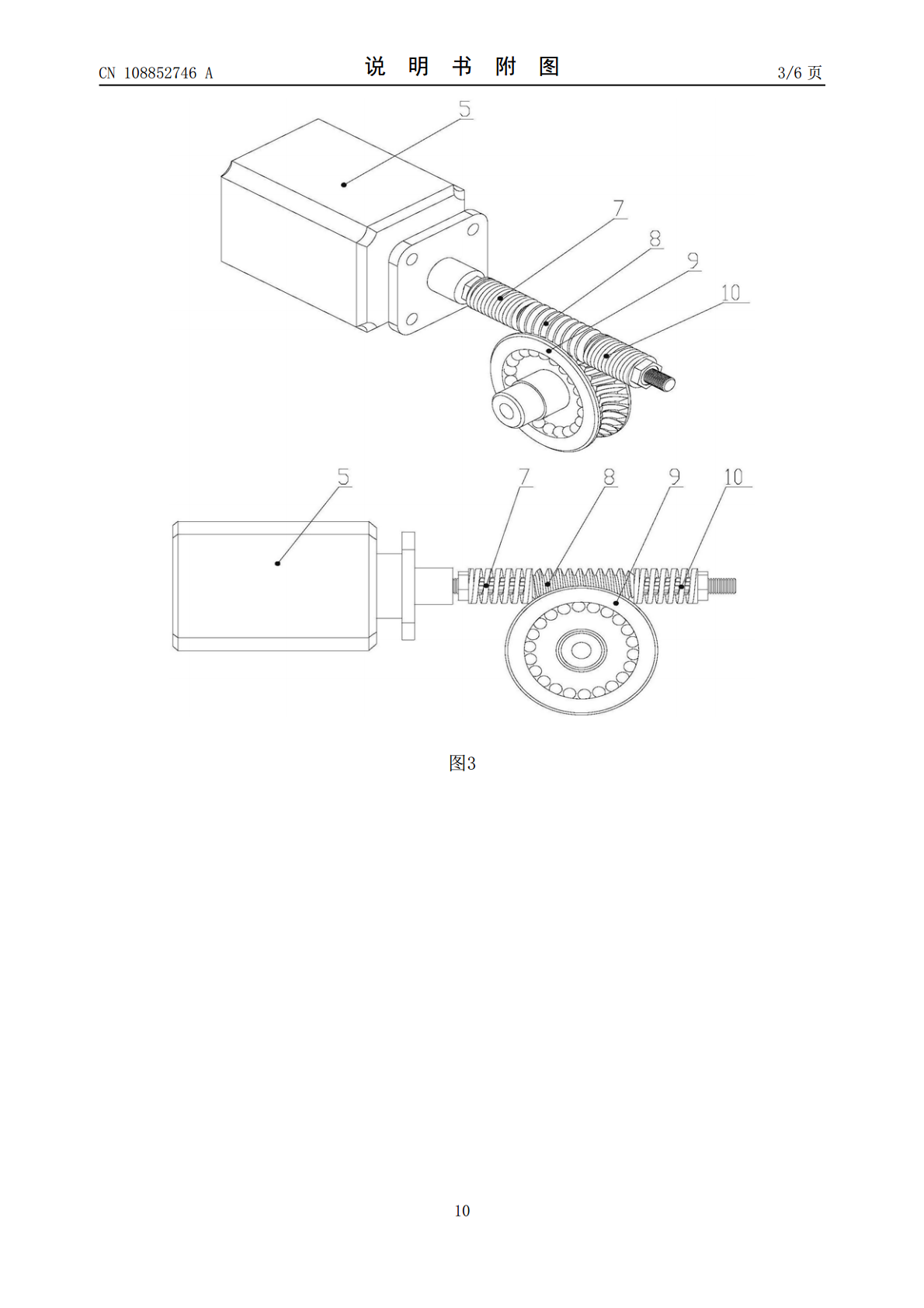
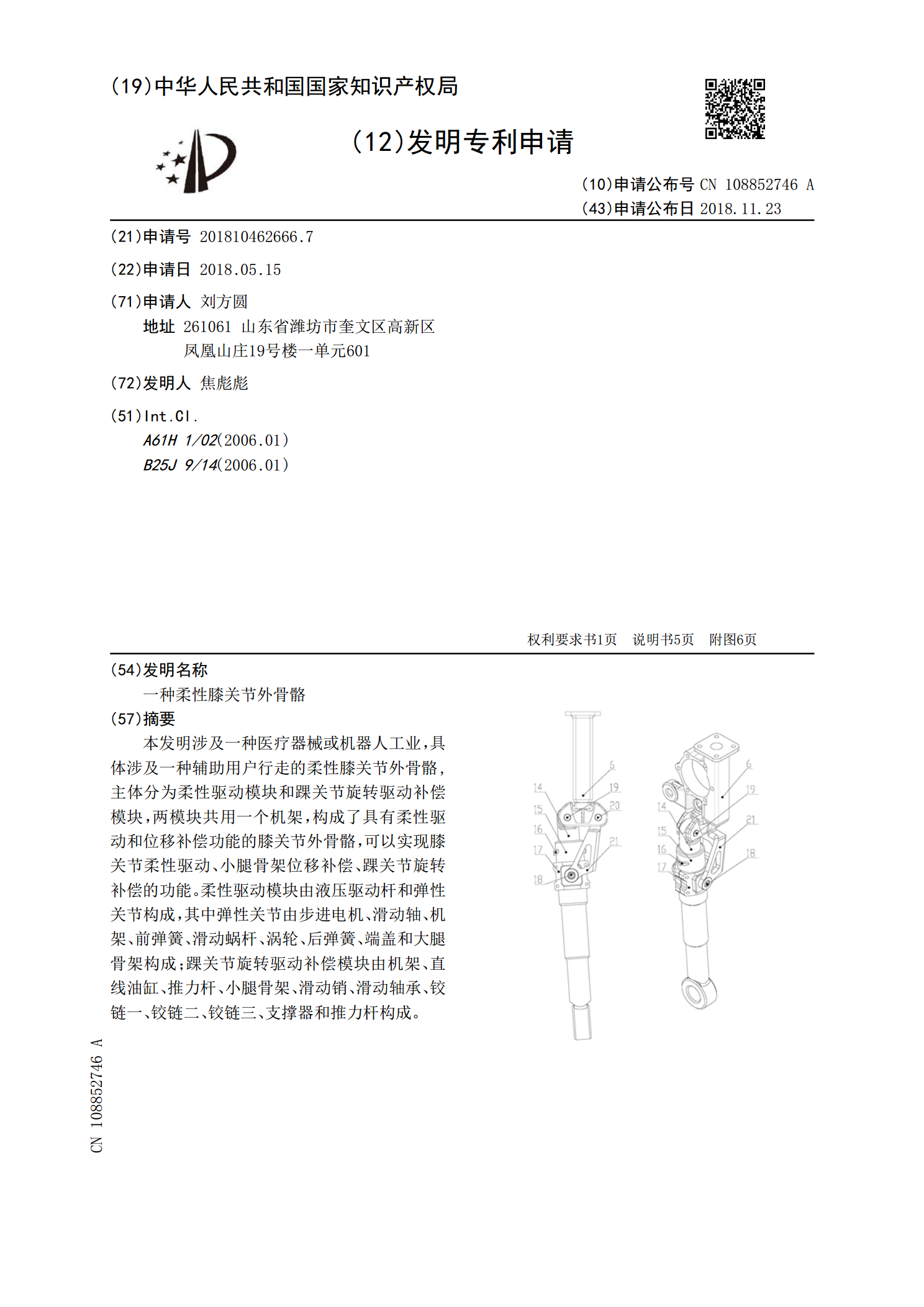
本发明涉及一种医疗器械或机器人工业,具体涉及一种辅助用户行走的柔性膝关节外骨骼,主体分为柔性驱动模块和踝关节旋转驱动补偿模块,两模块共用一个机架,构成了具有柔性驱动和位移补偿功能的膝关节外骨骼,可以实现膝关节柔性驱动、小腿骨架位移补偿、踝关节旋转补偿的功能。柔性驱动模块由液压驱动杆和弹性关节构成,其中弹性关节由步进电机、滑动轴、机架、前弹簧、滑动蜗杆、涡轮、后弹簧、端盖和大腿骨架构成;踝关节旋转驱动补偿模块由机架、直线油缸、推力杆、小腿骨架、滑动销、滑动轴承、铰链一、铰链二、铰链三、支撑器和推力杆构成。
一种气动肌肉驱动的柔性膝关节外骨骼.pdf
本申请公开了一种气动肌肉驱动的柔性膝关节外骨骼,涉及智能装备、机器人、穿戴装备领域,包括大腿固定板、小腿固定板、仿生关节、气动肌肉模块;仿生关节连接于大腿固定板和小腿固定板之间,以使大腿固定板和小腿固定板之间的瞬心轨迹与膝盖的顺心轨迹一致;气动肌肉模块包括气动肌肉、第一钢丝绳、第二钢丝绳、联动机构,气动肌肉连接于大腿固定板正对大腿正面位置,第一钢丝绳的一端连接于气动肌肉的输出端、另一端与联动机构连接,第二钢丝绳的一端与联动机构连接、另一端与小腿固定板连接,气动肌肉用于驱动第一钢丝绳运动来驱动联动机构运动、
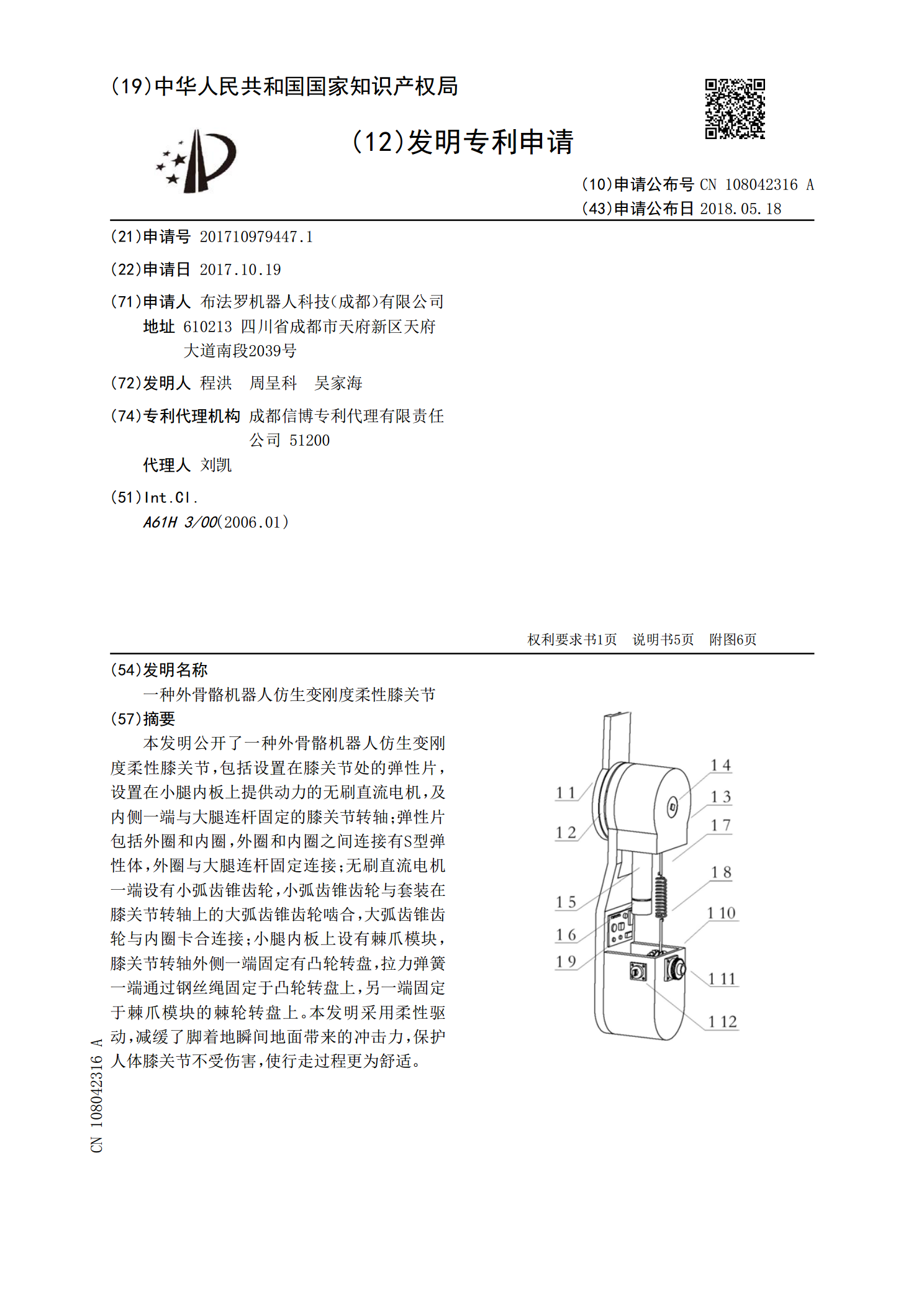
一种外骨骼机器人仿生变刚度柔性膝关节.pdf
本发明公开了一种外骨骼机器人仿生变刚度柔性膝关节,包括设置在膝关节处的弹性片,设置在小腿内板上提供动力的无刷直流电机,及内侧一端与大腿连杆固定的膝关节转轴;弹性片包括外圈和内圈,外圈和内圈之间连接有S型弹性体,外圈与大腿连杆固定连接;无刷直流电机一端设有小弧齿锥齿轮,小弧齿锥齿轮与套装在膝关节转轴上的大弧齿锥齿轮啮合,大弧齿锥齿轮与内圈卡合连接;小腿内板上设有棘爪模块,膝关节转轴外侧一端固定有凸轮转盘,拉力弹簧一端通过钢丝绳固定于凸轮转盘上,另一端固定于棘爪模块的棘轮转盘上。本发明采用柔性驱动,减缓了脚着
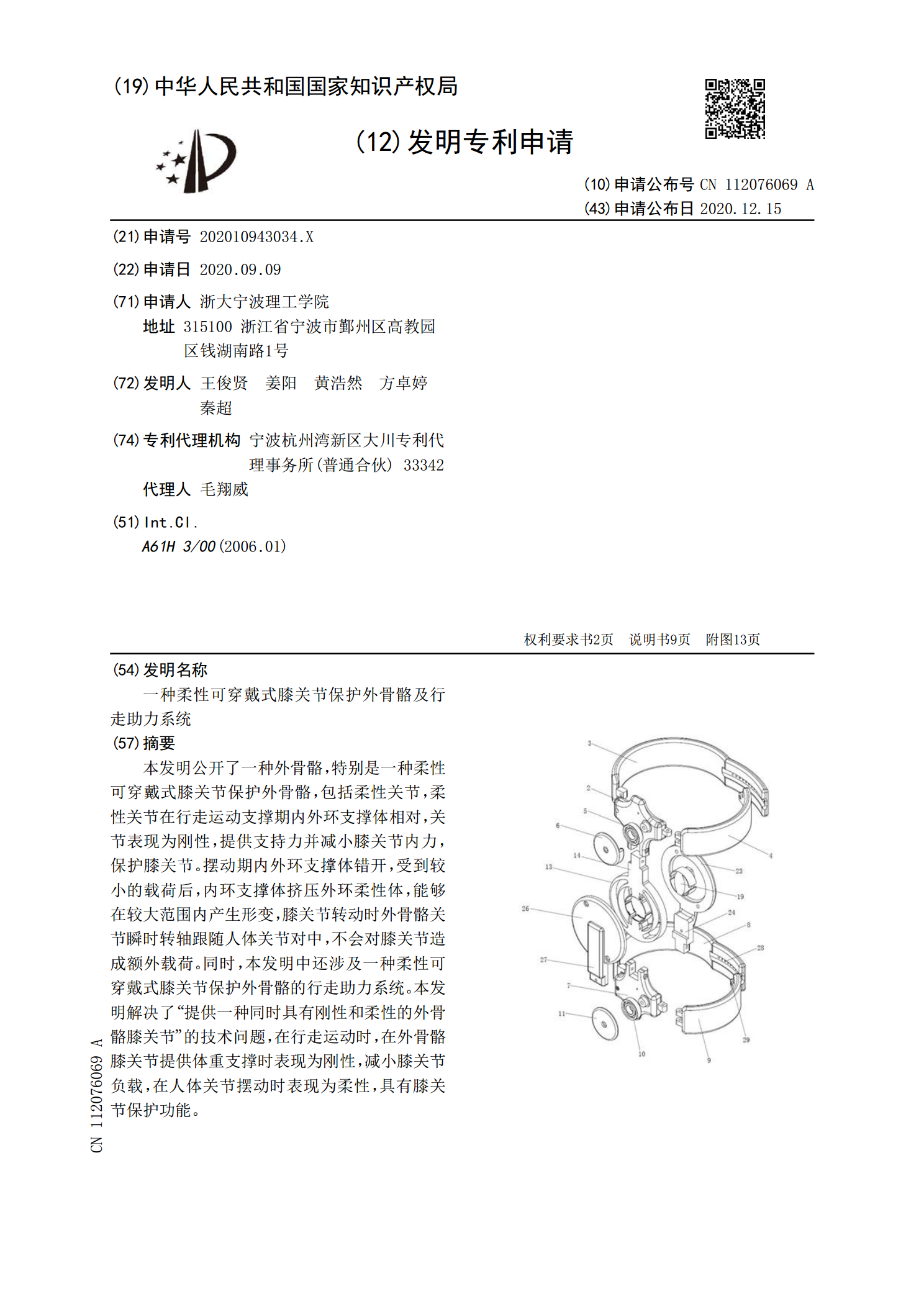
一种柔性可穿戴式膝关节保护外骨骼及行走助力系统.pdf
本发明公开了一种外骨骼,特别是一种柔性可穿戴式膝关节保护外骨骼,包括柔性关节,柔性关节在行走运动支撑期内外环支撑体相对,关节表现为刚性,提供支持力并减小膝关节内力,保护膝关节。摆动期内外环支撑体错开,受到较小的载荷后,内环支撑体挤压外环柔性体,能够在较大范围内产生形变,膝关节转动时外骨骼关节瞬时转轴跟随人体关节对中,不会对膝关节造成额外载荷。同时,本发明中还涉及一种柔性可穿戴式膝关节保护外骨骼的行走助力系统。本发明解决了“提供一种同时具有刚性和柔性的外骨骼膝关节”的技术问题,在行走运动时,在外骨骼膝关节提
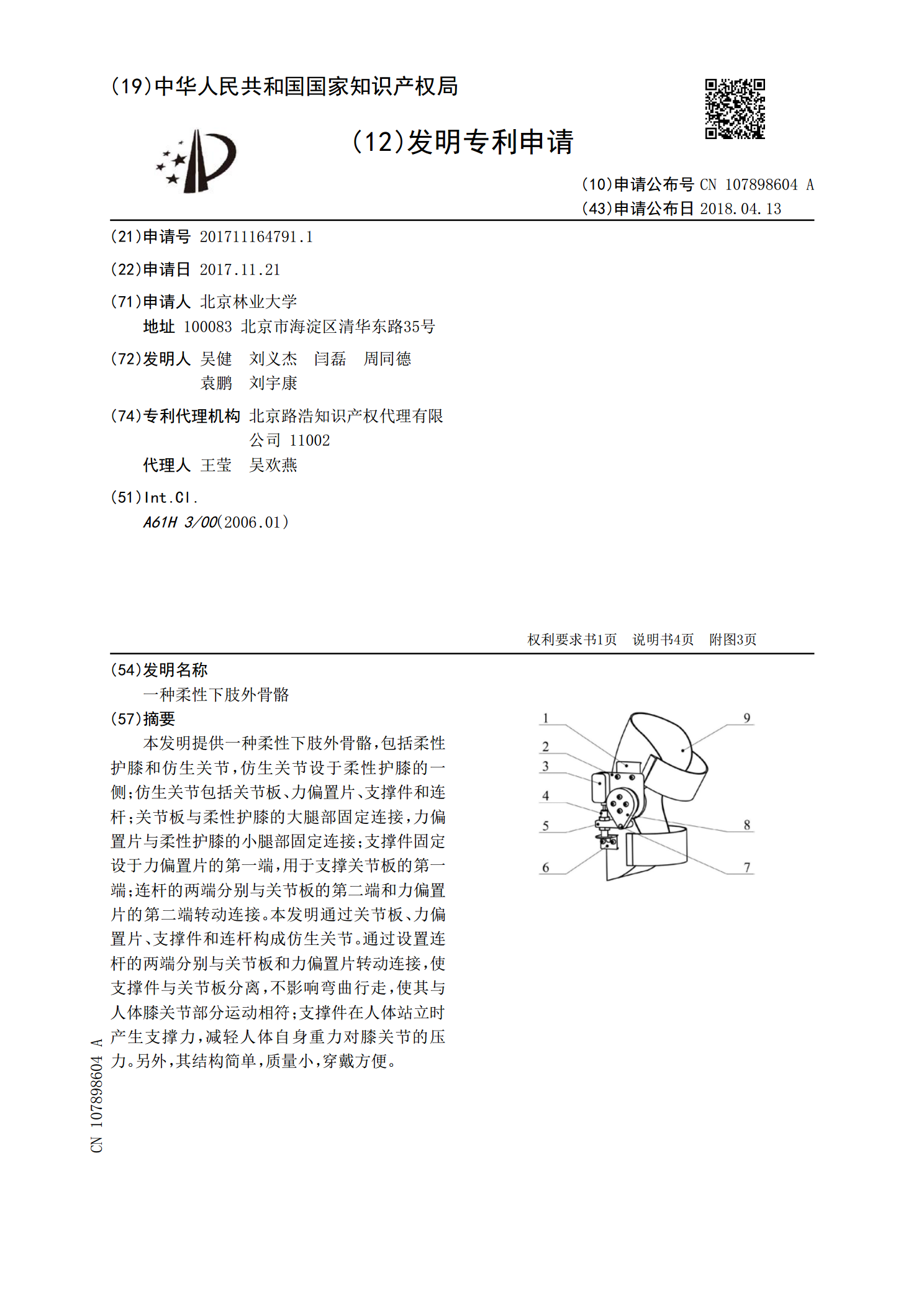
一种柔性下肢外骨骼.pdf
本发明提供一种柔性下肢外骨骼,包括柔性护膝和仿生关节,仿生关节设于柔性护膝的一侧;仿生关节包括关节板、力偏置片、支撑件和连杆;关节板与柔性护膝的大腿部固定连接,力偏置片与柔性护膝的小腿部固定连接;支撑件固定设于力偏置片的第一端,用于支撑关节板的第一端;连杆的两端分别与关节板的第二端和力偏置片的第二端转动连接。本发明通过关节板、力偏置片、支撑件和连杆构成仿生关节。通过设置连杆的两端分别与关节板和力偏置片转动连接,使支撑件与关节板分离,不影响弯曲行走,使其与人体膝关节部分运动相符;支撑件在人体站立时产生支撑力