
一种基于多无人艇的目标跟踪协同控制系统和方法.pdf

是立****92

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多无人艇的目标跟踪协同控制系统和方法.pdf
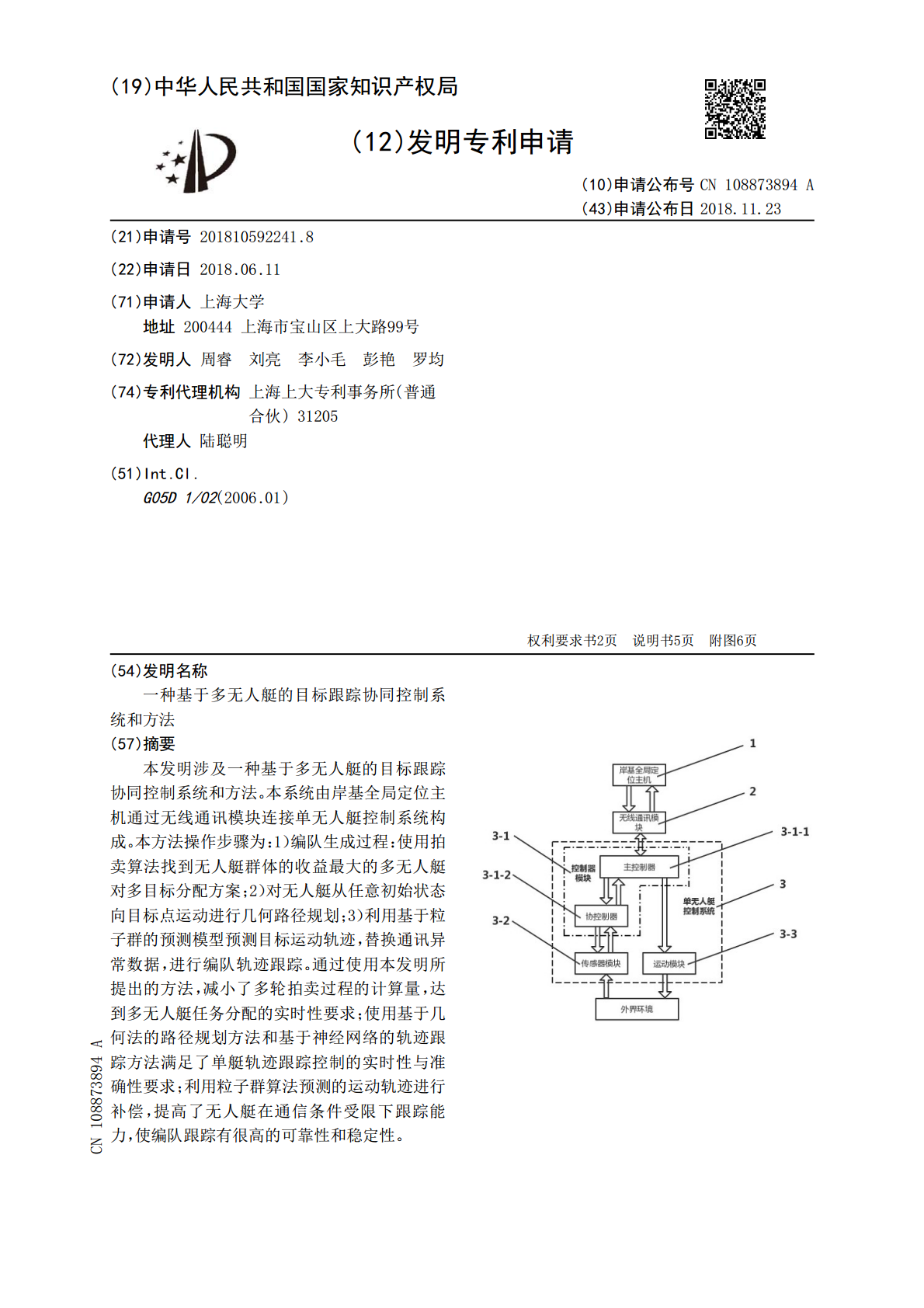
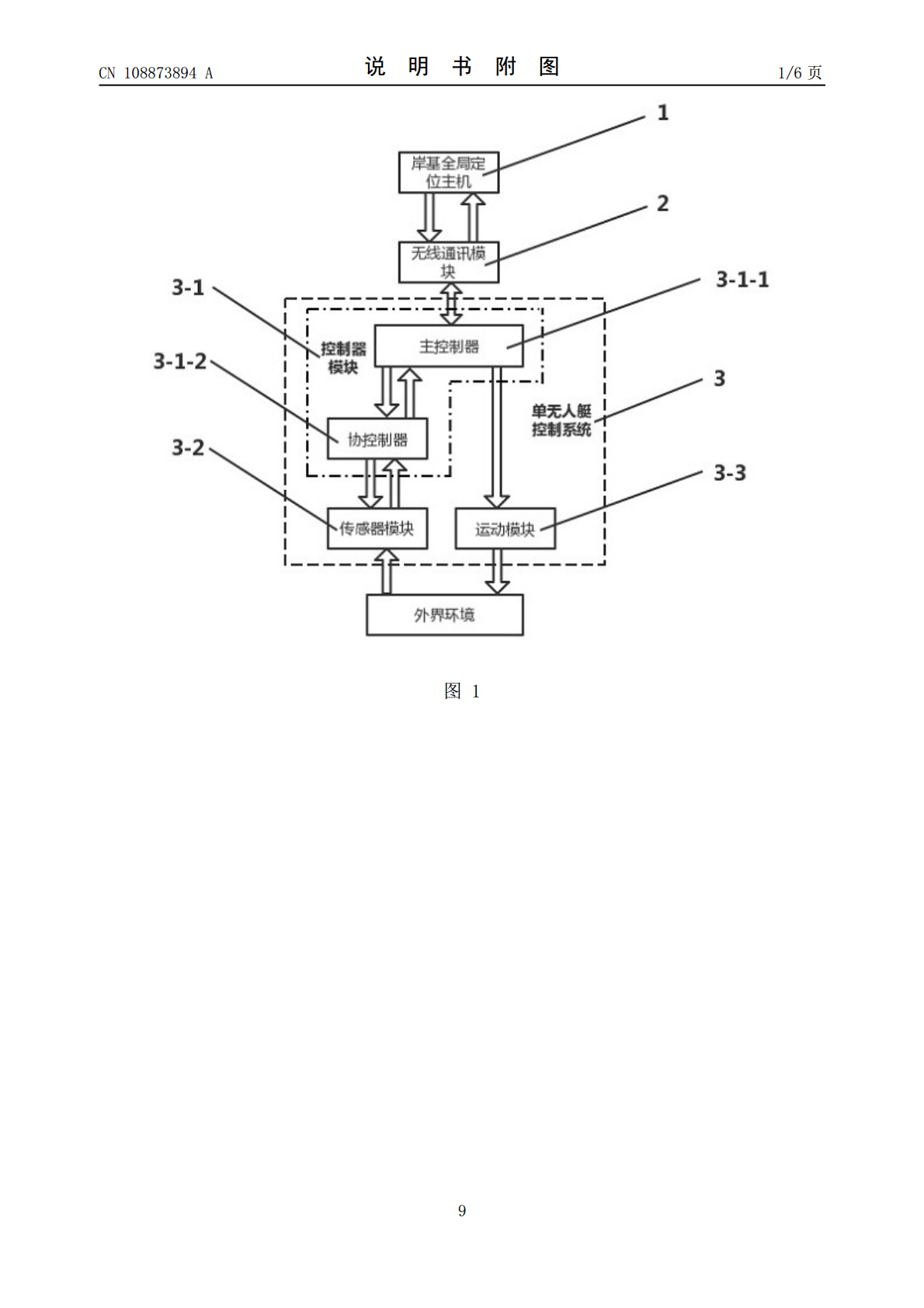
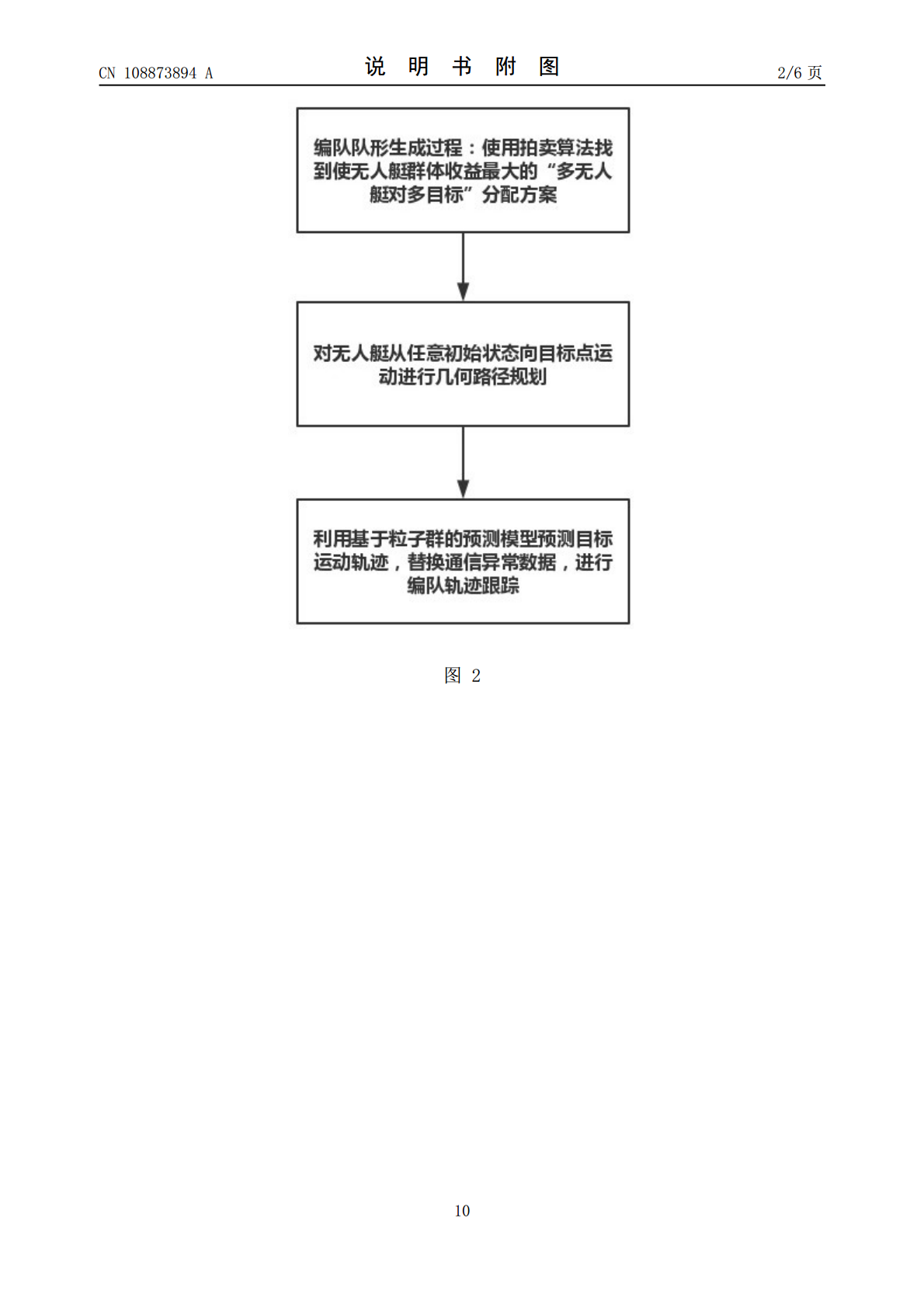
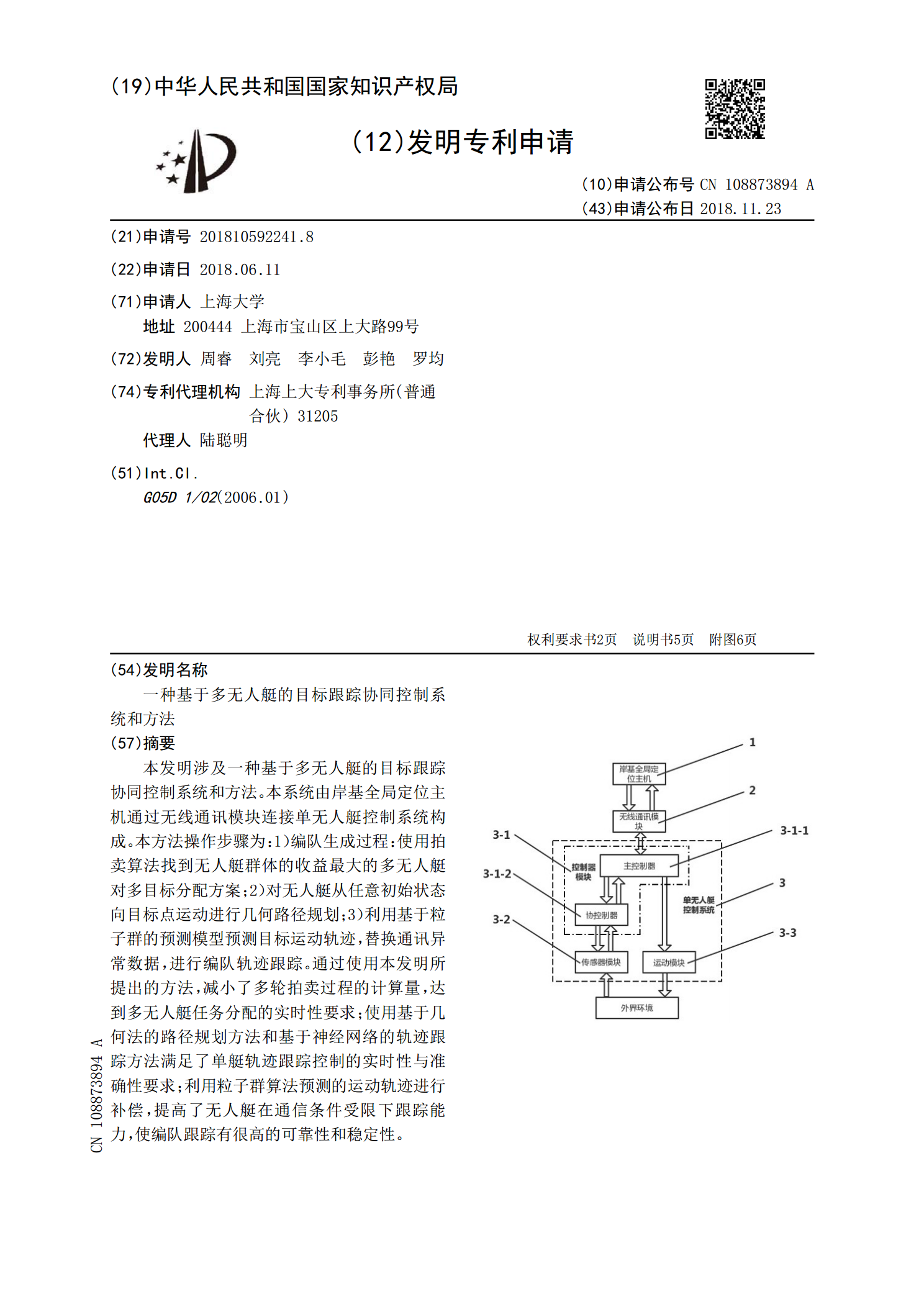
本发明涉及一种基于多无人艇的目标跟踪协同控制系统和方法。本系统由岸基全局定位主机通过无线通讯模块连接单无人艇控制系统构成。本方法操作步骤为:1)编队生成过程:使用拍卖算法找到无人艇群体的收益最大的多无人艇对多目标分配方案;2)对无人艇从任意初始状态向目标点运动进行几何路径规划;3)利用基于粒子群的预测模型预测目标运动轨迹,替换通讯异常数据,进行编队轨迹跟踪。通过使用本发明所提出的方法,减小了多轮拍卖过程的计算量,达到多无人艇任务分配的实时性要求;使用基于几何法的路径规划方法和基于神经网络的轨迹跟踪方法满足
一种基于比例导引的无人艇目标跟踪方法及系统.pdf
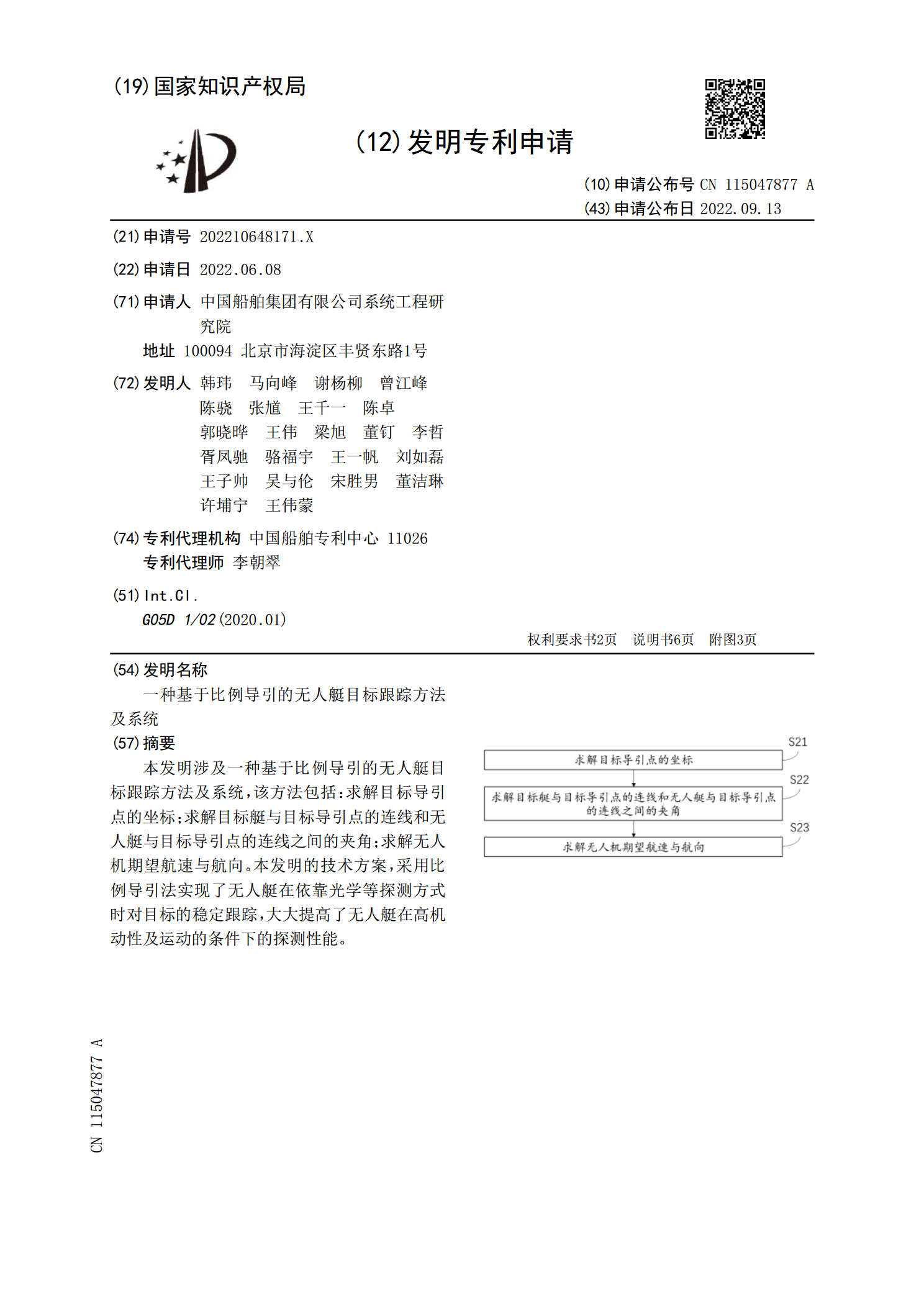
本发明涉及一种基于比例导引的无人艇目标跟踪方法及系统,该方法包括:求解目标导引点的坐标;求解目标艇与目标导引点的连线和无人艇与目标导引点的连线之间的夹角;求解无人机期望航速与航向。本发明的技术方案,采用比例导引法实现了无人艇在依靠光学等探测方式时对目标的稳定跟踪,大大提高了无人艇在高机动性及运动的条件下的探测性能。

基于积分LOS的多无人艇协同路径跟踪.docx
基于积分LOS的多无人艇协同路径跟踪标题:基于积分LOS的多无人艇协同路径跟踪摘要:无人艇技术的快速发展和广泛应用给海洋资源开发、环境监测和海洋科学研究等领域带来了巨大的潜力和效益。在实际应用中,多艘无人艇协同作业已成为一种常见的需求,但在路径跟踪问题上仍存在一定的挑战。本文基于积分LOS控制方法,研究了多无人艇协同路径跟踪的算法与实现,通过仿真实验验证了该方法在多艘无人艇协同路径跟踪问题中的有效性和稳定性。1.引言随着无人艇技术的成熟和应用需求的增加,多无人艇协同作业在海洋领域具有广阔的应用前景。而多无
一种无人艇载无人机海空协同视觉跟踪与自主回收方法.pdf
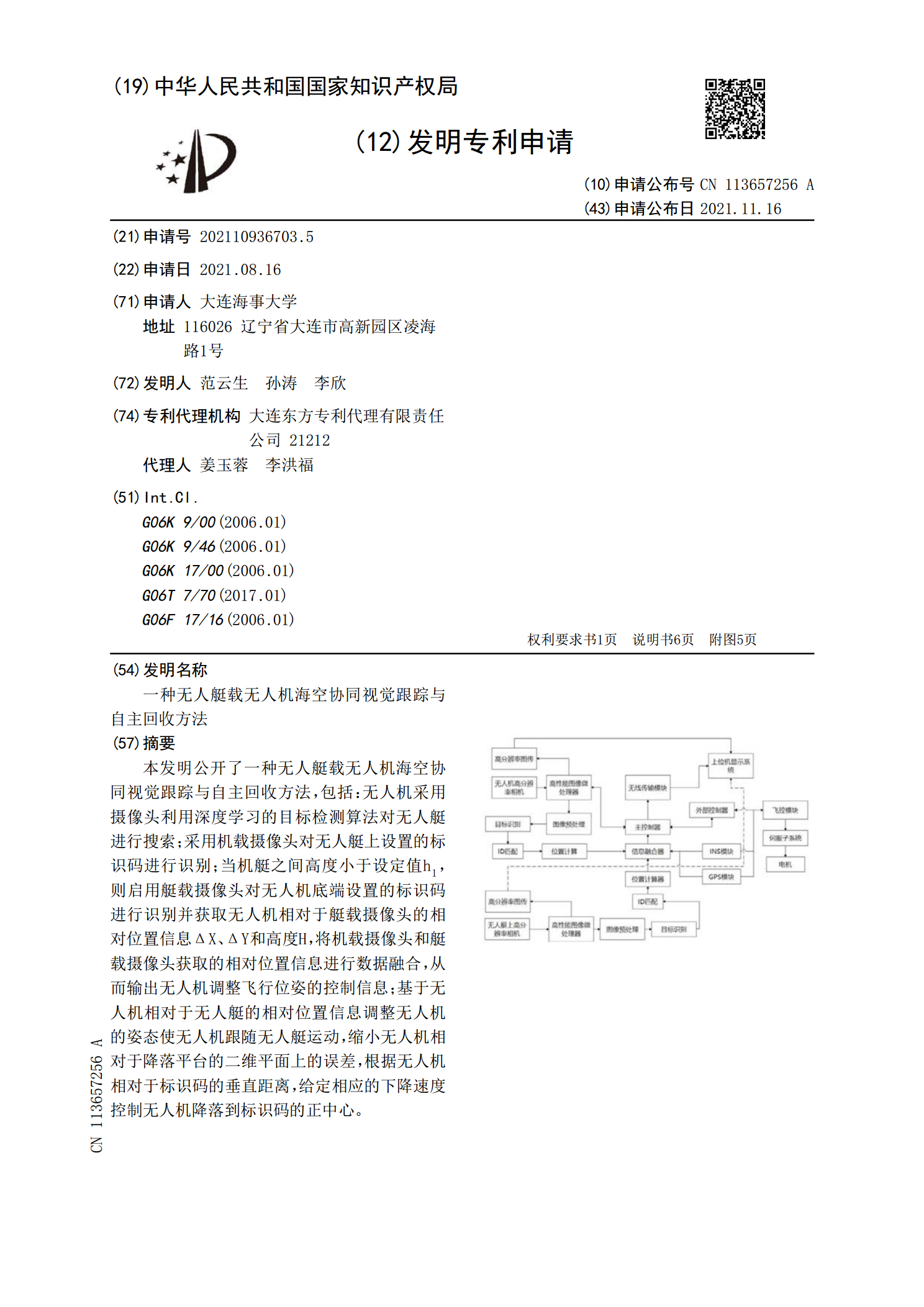
本发明公开了一种无人艇载无人机海空协同视觉跟踪与自主回收方法,包括:无人机采用摄像头利用深度学习的目标检测算法对无人艇进行搜索;采用机载摄像头对无人艇上设置的标识码进行识别;当机艇之间高度小于设定值h

水上无人艇目标跟踪控制方法研究.docx
水上无人艇目标跟踪控制方法研究水上无人艇目标跟踪控制方法研究摘要:水上无人艇作为一种重要的机器人技术应用,具有广泛的应用领域。本文主要对水上无人艇目标跟踪控制方法进行研究。首先介绍了水上无人艇的基本工作原理和目标跟踪的重要性。然后,分析了目标跟踪中的挑战和存在的问题。接着,详细介绍了几种常见的水上无人艇目标跟踪控制方法,包括基于计算机视觉的方法、基于传感器的方法和基于深度学习的方法。最后,总结了目标跟踪的研究现状和未来发展趋势。关键词:水上无人艇,目标跟踪,控制方法,计算机视觉,传感器,深度学习1.引言水