
一种无人艇载无人机海空协同视觉跟踪与自主回收方法.pdf

慧颖****23

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人艇载无人机海空协同视觉跟踪与自主回收方法.pdf
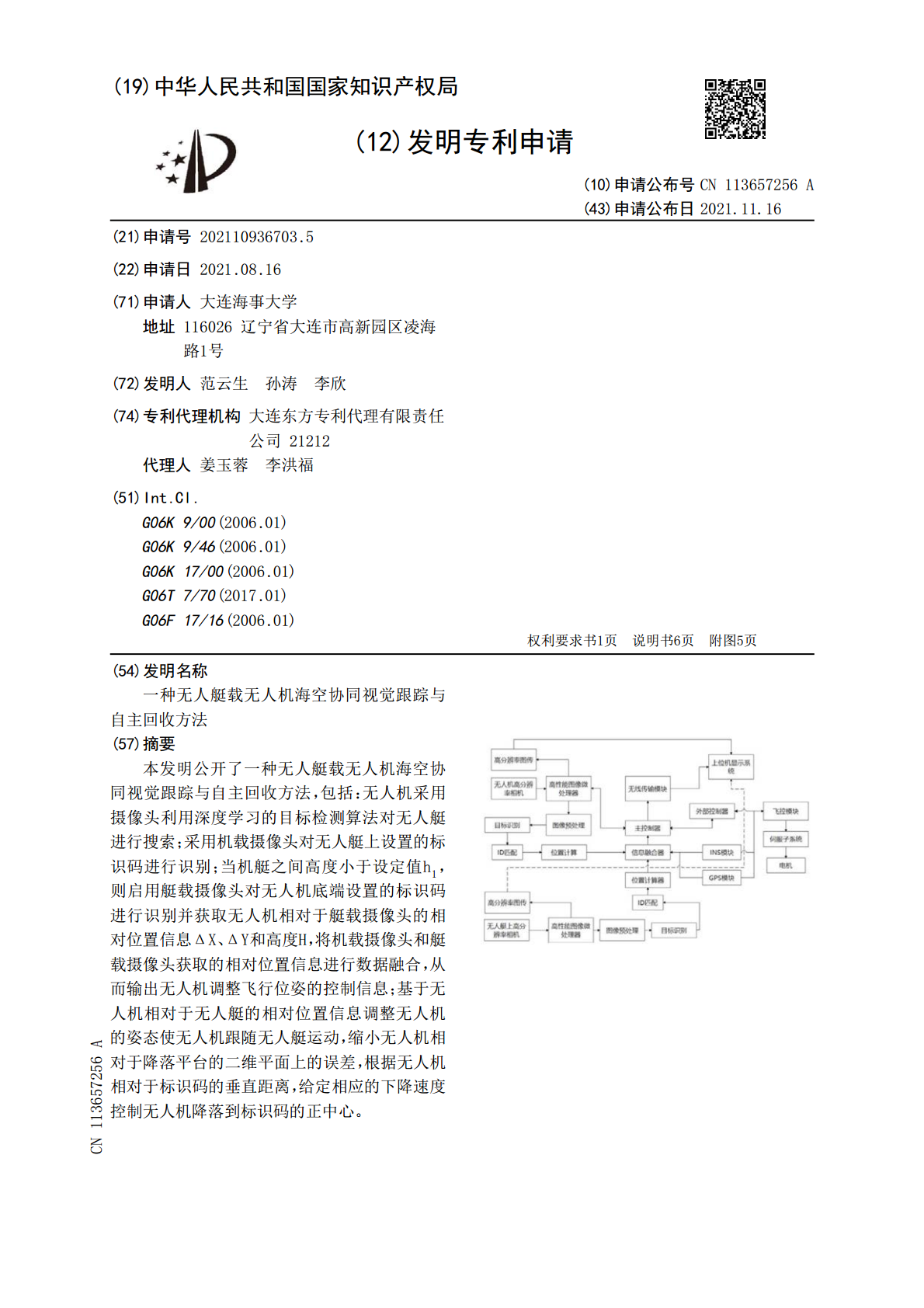
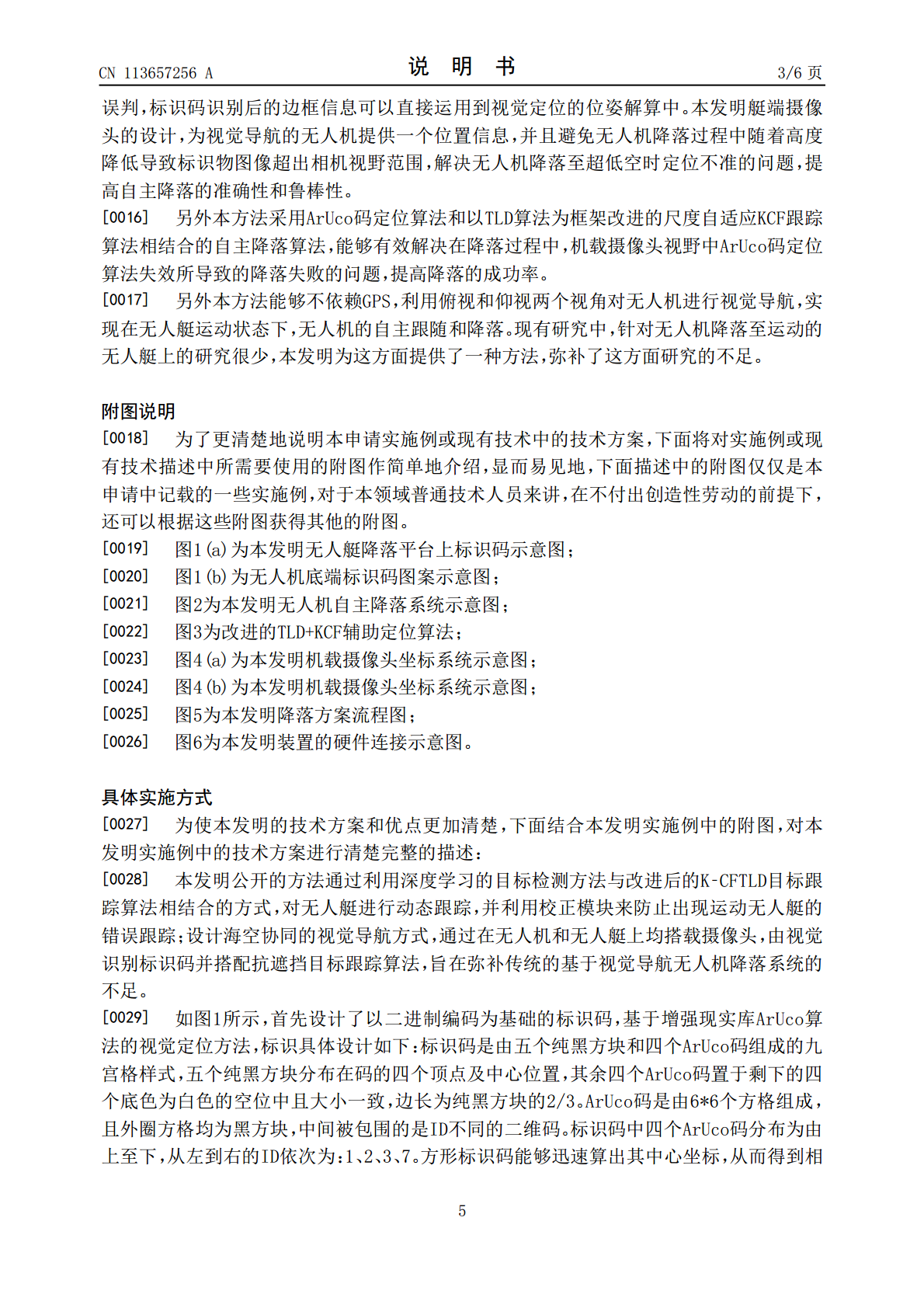
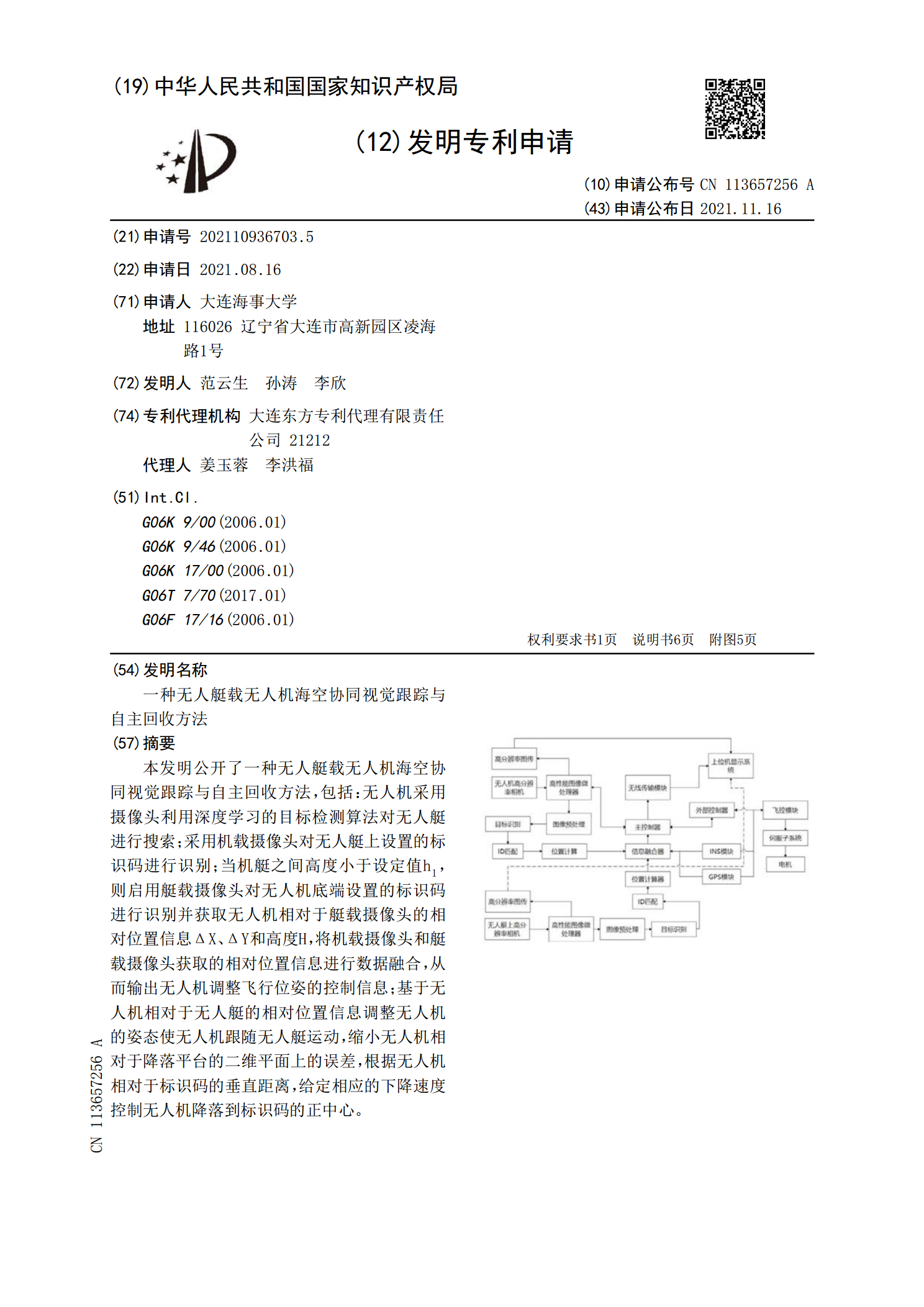
本发明公开了一种无人艇载无人机海空协同视觉跟踪与自主回收方法,包括:无人机采用摄像头利用深度学习的目标检测算法对无人艇进行搜索;采用机载摄像头对无人艇上设置的标识码进行识别;当机艇之间高度小于设定值h

艇载系留无人机回收布放装置及自主起降控制方法.pdf
本发明提供了一种艇载系留无人机回收布放装置及自主起降控制方法,包括系留无人机、起降平台以及线缆收放绞车,所述系留无人机包括起飞模式、飞行模式以及降落模式并与船载控制端通讯连接,所述起降平台安装在船体上并用于承载所述系留无人机,所述线缆收放绞车通过系留线缆与所述系留无人机连接并能够在所述船载控制端的控制下动作以响应所述系留无人机的不同模式,本发明通过系留无人机与船载控制端的通讯以及结构的设置解决了系留无人机和无人船结合应用的关键问题即艇载系留无人机的自主起降控制问题,实现了系留无人机的精准、稳定、安全降落。
一种无人机无人艇协同平台端对端自主降落控制方法.pdf
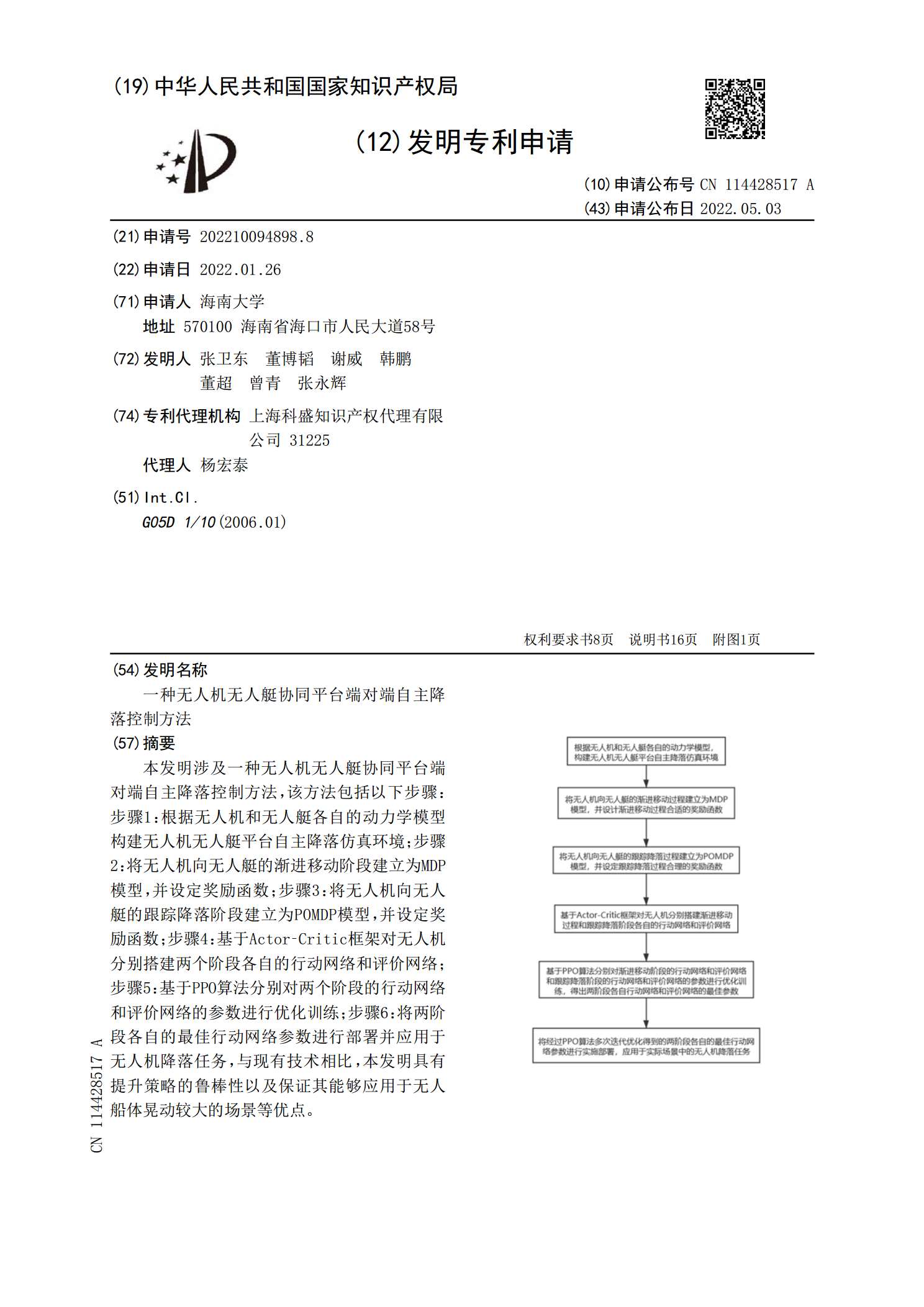
本发明涉及一种无人机无人艇协同平台端对端自主降落控制方法,该方法包括以下步骤:步骤1:根据无人机和无人艇各自的动力学模型构建无人机无人艇平台自主降落仿真环境;步骤2:将无人机向无人艇的渐进移动阶段建立为MDP模型,并设定奖励函数;步骤3:将无人机向无人艇的跟踪降落阶段建立为POMDP模型,并设定奖励函数;步骤4:基于Actor?Critic框架对无人机分别搭建两个阶段各自的行动网络和评价网络;步骤5:基于PPO算法分别对两个阶段的行动网络和评价网络的参数进行优化训练;步骤6:将两阶段各自的最佳行动网络参数
无人艇载航海雷达与视觉图像协同的海上多目标长期检测与跟踪方法.pdf
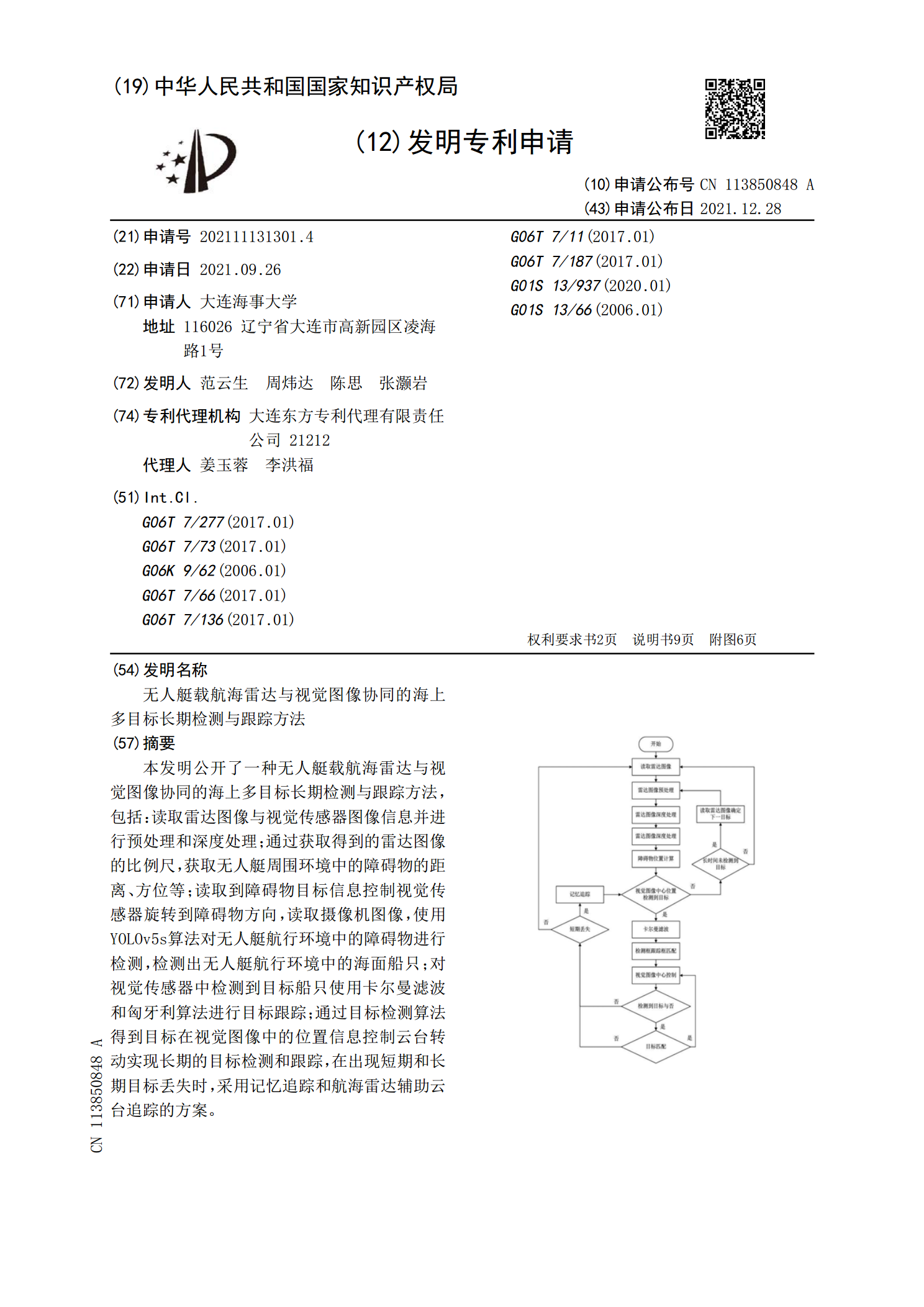
本发明公开了一种无人艇载航海雷达与视觉图像协同的海上多目标长期检测与跟踪方法,包括:读取雷达图像与视觉传感器图像信息并进行预处理和深度处理;通过获取得到的雷达图像的比例尺,获取无人艇周围环境中的障碍物的距离、方位等;读取到障碍物目标信息控制视觉传感器旋转到障碍物方向,读取摄像机图像,使用YOLOv5s算法对无人艇航行环境中的障碍物进行检测,检测出无人艇航行环境中的海面船只;对视觉传感器中检测到目标船只使用卡尔曼滤波和匈牙利算法进行目标跟踪;通过目标检测算法得到目标在视觉图像中的位置信息控制云台转动实现长期

无人机艇协同自主降落的若干关键技术.pptx
无人机艇协同自主降落的若干关键技术目录添加章节标题无人机艇协同自主降落系统概述无人机艇协同自主降落系统的定义和组成无人机艇协同自主降落系统的应用场景和优势无人机艇协同自主降落系统的关键技术无人机艇协同自主降落的关键技术无人机艇协同定位技术无人机艇协同导航技术无人机艇协同控制技术无人机艇协同感知与决策技术无人机艇协同自主降落技术的挑战与未来发展无人机艇协同自主降落技术的挑战无人机艇协同自主降落技术的未来发展方向无人机艇协同自主降落技术的实际应用前景THANKYOU