
一种基于形状上下文描述的太赫兹图像危险品识别方法.pdf

努力****向丝

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于形状上下文描述的太赫兹图像危险品识别方法.pdf
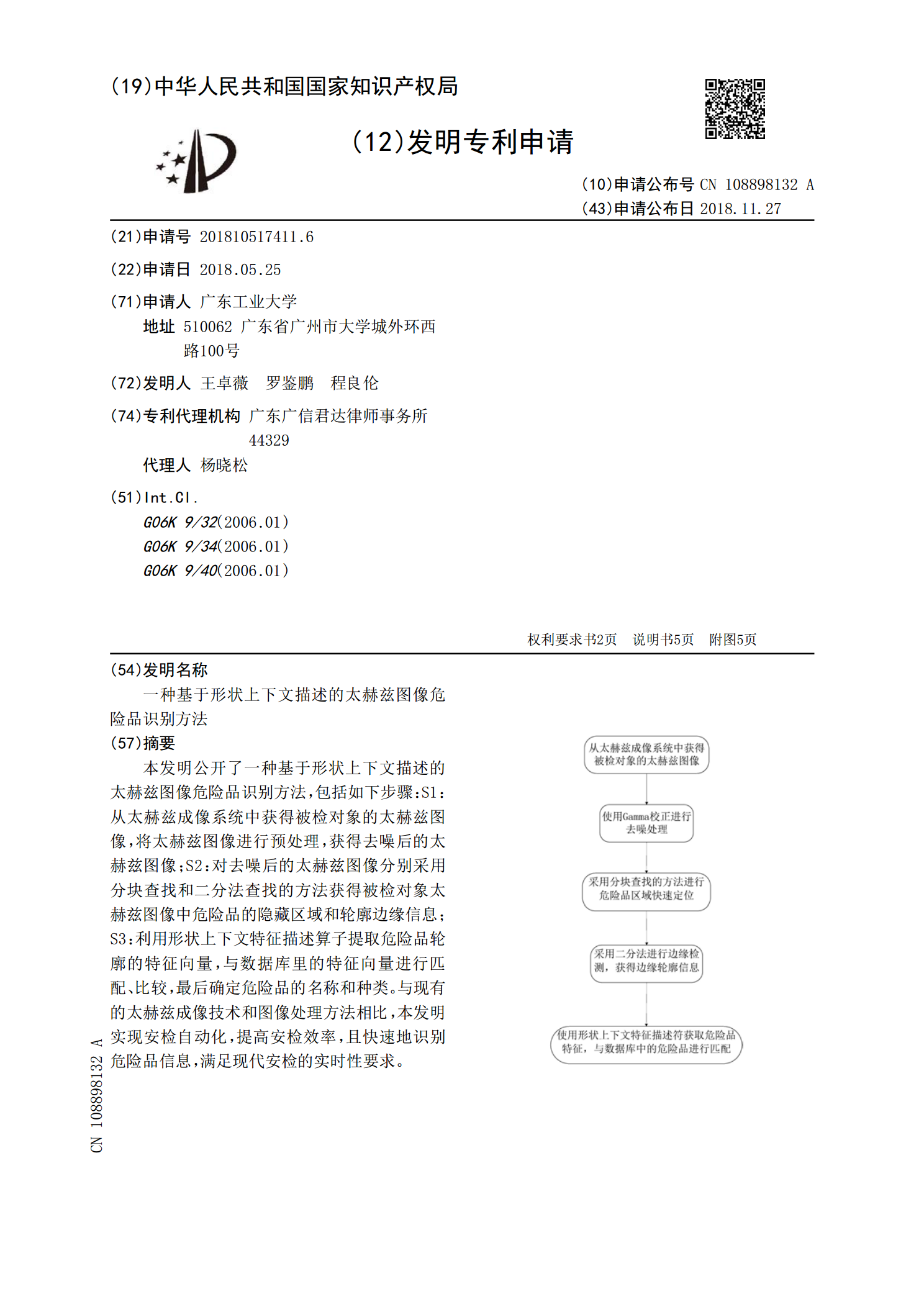
本发明公开了一种基于形状上下文描述的太赫兹图像危险品识别方法,包括如下步骤:S1:从太赫兹成像系统中获得被检对象的太赫兹图像,将太赫兹图像进行预处理,获得去噪后的太赫兹图像;S2:对去噪后的太赫兹图像分别采用分块查找和二分法查找的方法获得被检对象太赫兹图像中危险品的隐藏区域和轮廓边缘信息;S3:利用形状上下文特征描述算子提取危险品轮廓的特征向量,与数据库里的特征向量进行匹配、比较,最后确定危险品的名称和种类。与现有的太赫兹成像技术和图像处理方法相比,本发明实现安检自动化,提高安检效率,且快速地识别危险品信

一种基于深度学习的太赫兹图像识别方法及系统.pdf
本发明公开了一种基于深度学习的太赫兹图像识别方法及系统,属于太赫兹图像识别技术领域,包括以下步骤:S1:设计并训练卷积神经网络;S2:检测太赫兹原始图像中的危险目标信息;S3:对目标信息进行结构化处理;S4:将图像信息显示出来。在所述步骤S1中,在对太赫兹原始图像存在的危险目标进行检测前将所述卷积神经网络的权重文件载入检测设备。本发明实现了自动、高效的检测过程,有效地提高了安检速度和精度,可大大减少人工判图的时间,能够减少工作人员的数量;能够对大量信息进行有效过滤,保留有效信息,剔除冗余报警信息,将完整且

基于距离比上下文的形状描述与识别方法.docx
基于距离比上下文的形状描述与识别方法基于距离比上下文的形状描述与识别方法摘要:形状描述与识别是计算机视觉领域的重要研究方向,其在物体识别、图像检测等应用中具有广泛的应用前景。本论文提出了一种基于距离比上下文的形状描述与识别方法。首先,通过提取图像中的轮廓信息,获取到物体的形状特征。然后,利用距离比上下文算法对形状特征进行描述和表示。最后,通过训练分类器实现对不同形状的识别。实验结果表明,所提出的方法在形状描述与识别任务中具有较好的性能和鲁棒性。关键词:形状描述;形状识别;距离比上下文;轮廓信息;分类器1引

基于太赫兹光谱的危险品识别研究.docx
基于太赫兹光谱的危险品识别研究基于太赫兹光谱的危险品识别研究摘要:随着社会的快速发展,危险品的使用和储存也越来越普遍。由于危险品的性质具有潜在的危害,准确地识别和检测危险品非常重要。本文主要介绍了基于太赫兹光谱的危险品识别研究。太赫兹光谱是介于红外光和微波之间的电磁辐射,具有独特的频谱特征和化学结构信息。利用太赫兹光谱技术,可以对物质的成分、结构和性质进行非接触式的、实时的检测和识别。本文综述了太赫兹光谱技术在危险品识别中的应用,并对其在未来的发展方向进行了展望。关键词:太赫兹光谱、危险品、识别、检测、发
一种基于深度学习的太赫兹图像优化方法.pdf
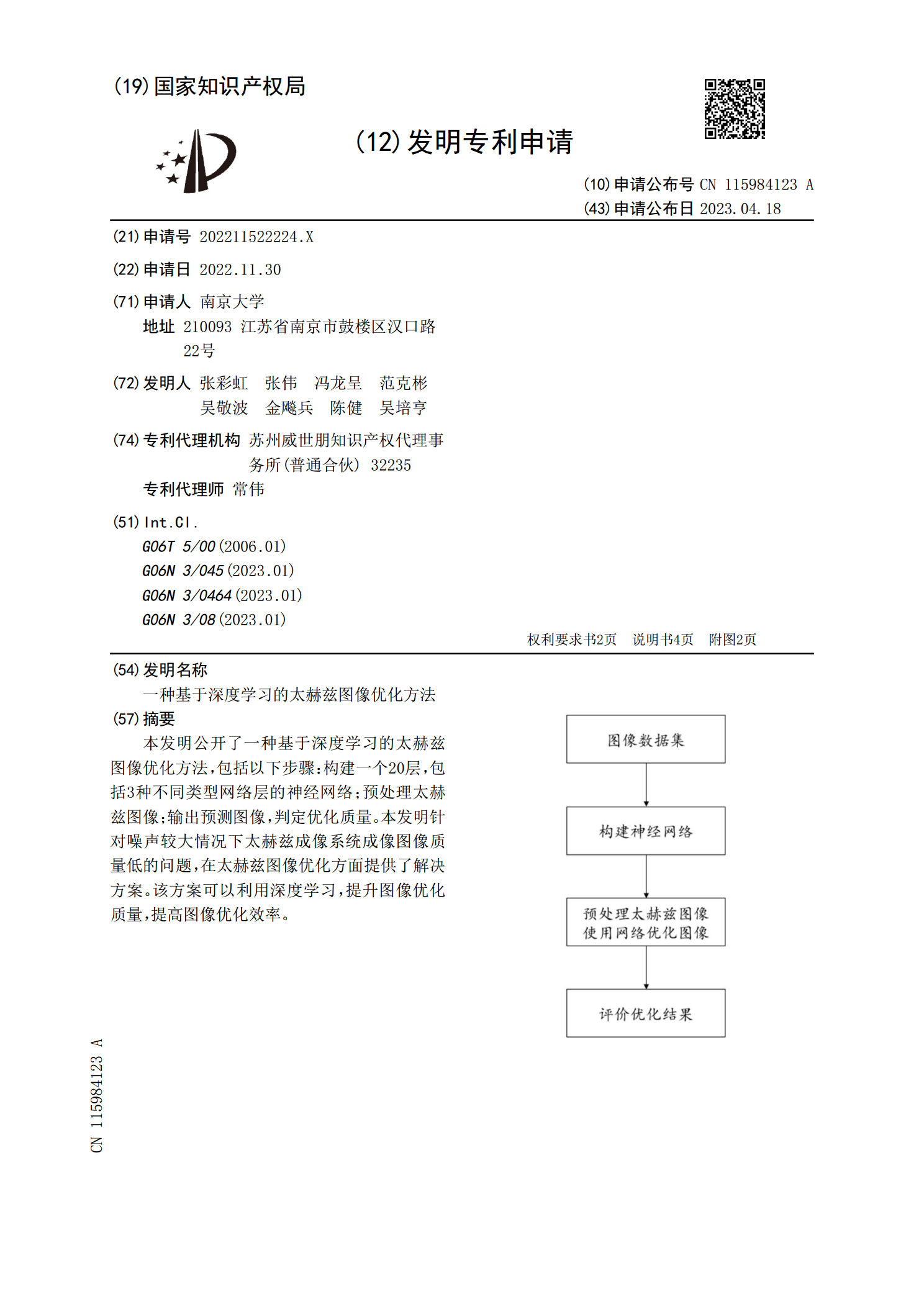
本发明公开了一种基于深度学习的太赫兹图像优化方法,包括以下步骤:构建一个20层,包括3种不同类型网络层的神经网络;预处理太赫兹图像;输出预测图像,判定优化质量。本发明针对噪声较大情况下太赫兹成像系统成像图像质量低的问题,在太赫兹图像优化方面提供了解决方案。该方案可以利用深度学习,提升图像优化质量,提高图像优化效率。