
一种可调刚度索驱动并联装置.pdf

小琛****82


1/7
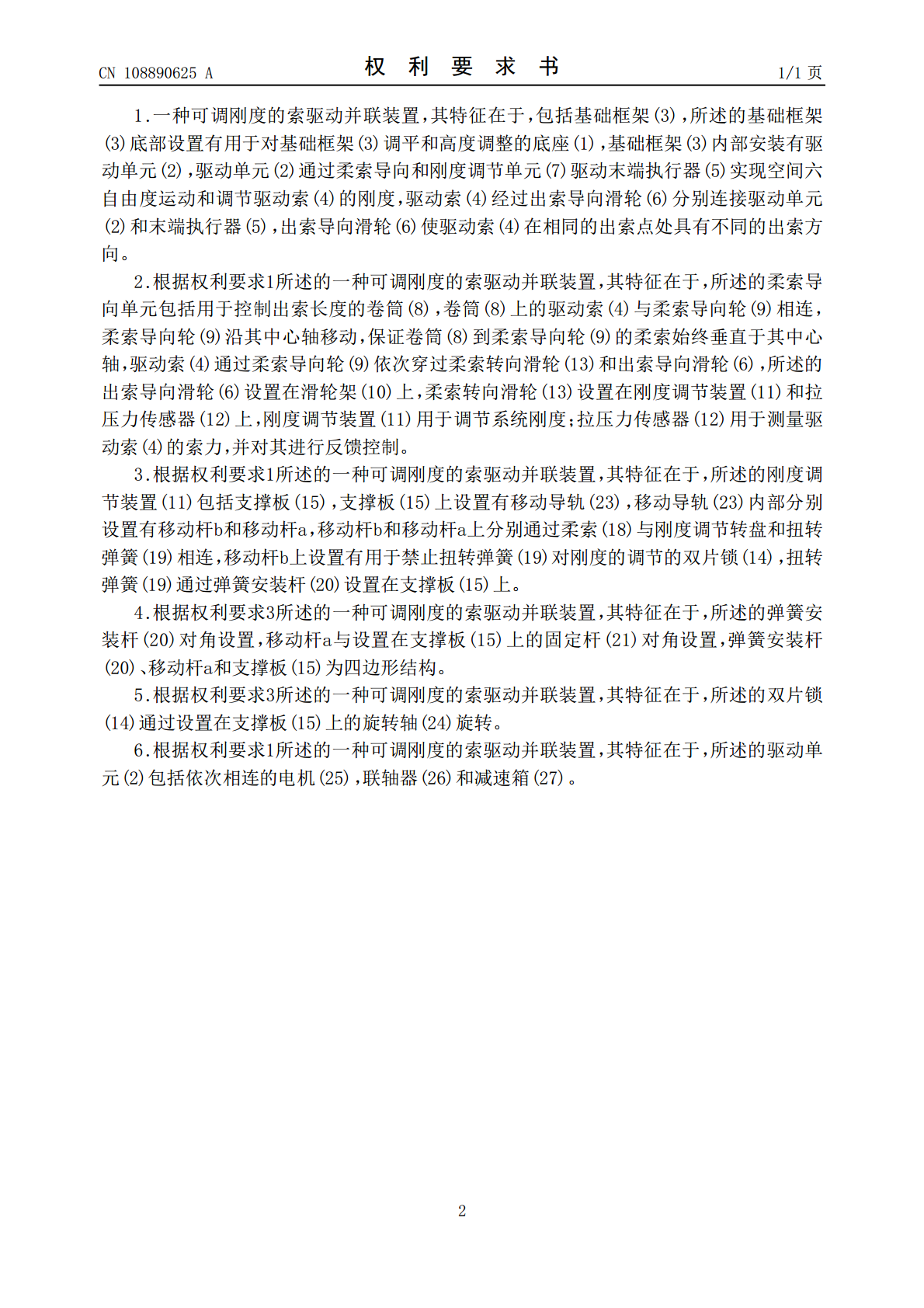
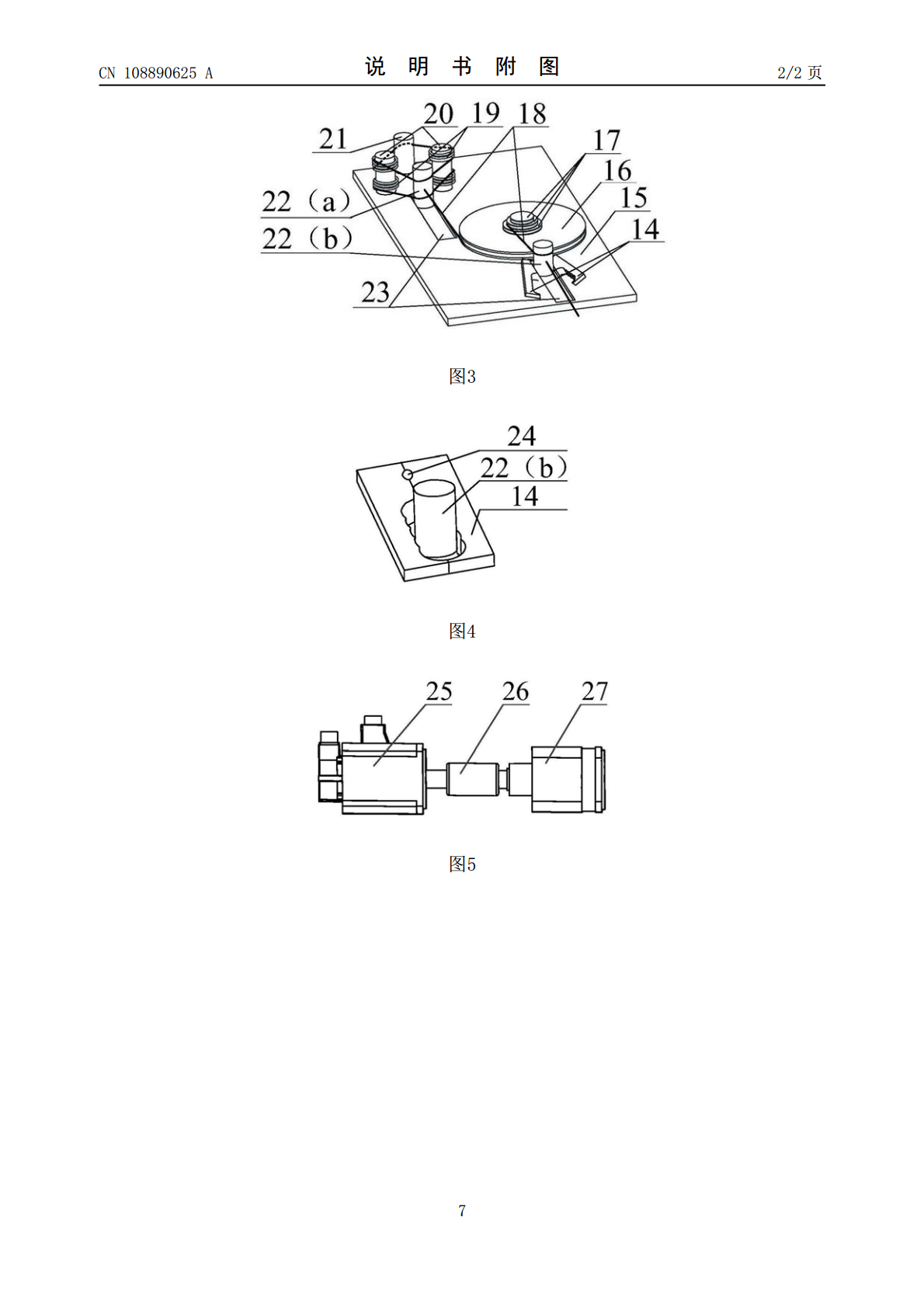
2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可调刚度索驱动并联装置.pdf
一种可调刚度的索驱动并联装置,包括基础框架,基础框架底部设置有用于对基础框架调平和高度调整的底座,基础框架内部安装有驱动单元,驱动单元通过柔索导向和刚度调节单元分别驱动末端执行器实现空间六自由度运动和调节驱动索的刚度,驱动索设置在出索导向滑轮上,出索导向滑轮使驱动索在相同的出索点处具有不同的出索方向,本发明具有较低的刚度,以吸收或缓冲碰撞产生的能量,从而降低或避免对人或产品造成的伤害;同时,在机器人作业时具有较高的刚度,以提高作业精度或负载能力。
一种完全约束柔索并联机器人变刚度装置.pdf
本发明公开了一种完全约束柔索并联机器人变刚度装置,包括主机箱,主机箱底部设有两道中空圆柱形直线导向槽,每道中空圆柱形直线导向槽中分别有压缩弹簧和圆形隔板,圆形隔板与主机箱之间分别连接压缩弹簧,主机箱内设有活动导向轮支撑轴、两二力滑杆,二力滑杆一端与圆柱形隔板及中空圆柱形直线导向槽底部接触、另一端共同转动连接至活动导向轮支撑轴,活动导向轮固定于活动导向轮支撑轴,主机箱内还转动安装有一对固定导向轮支撑轴,两固定导向轮支撑轴相对于活动导向轮支撑轴呈前后对称,固定导向轮支撑轴分别固定有固定导向轮;柔索从主机箱一侧

一种变刚度驱动装置.pdf
本发明公开了一种变刚度驱动装置,包括外壳、输出轴和变刚度单元,变刚度单元中的第一凸轮盘和第二凸轮盘分别能够进行转动,由于滑块始终与第一凸轮盘或第二凸轮盘保持接触,第一凸轮盘转动会使中心板上部的滑块沿着滑槽滑动,线性的弹簧与第一凸轮盘相配合能够实现弹簧压缩量的非线性变化,通过控制第一凸轮盘和第二凸轮盘的相对转动角度,能够改变变刚度驱动装置输出的刚度和位置,从而实现柔性输出,且装置结构简单,刚度位置调节快速灵活。

循环索驱动的索牵引并联机器人装置.pdf
本发明公开了一种循环索驱动的索牵引并联机器人装置,主要解决现有索牵引并联机器人驱动装置多,阻尼小,工作空间有限,控制难度大的问题。该装置包括:一个末端执行器(4),n个驱动装置(1)和n根柔索(2),驱动装置(1)与末端执行器(4)之间设有m组传动机构,每组传动机构包括动滑轮(31)和定滑轮(32):m组动滑轮(31)均匀布置在末端执行器(4)上,m组定滑轮(32)均匀固定在地基上;每根柔索(2)从驱动装置(1)伸出后,依次穿过动滑轮(31)和定滑轮(32),再与末端执行器(4)连接,形成循环索。本发明可

一种刚度可调的发卡式弹性支承刚度模拟装置.pdf
本申请属于航空发动机试验技术领域,具体涉及一种刚度可调的发卡式弹性支承刚度模拟装置。该装置包括轴承座(1)、球轴承(2)及螺旋密封套(3),该轴承座(1)包括内环(11)、外环(12)及多个发卡(13),内环(11)的外环面及外环(12)的内环面均在同一安装侧上分别设置有沿周向布置的多个插槽(111),各发卡(13)均包括两个平行的支臂(131),两个支臂在一端相互连接,另一端形成能够相互靠近或远离的弹性支点,每个弹性支点在相互背离的一侧设置有凸起(132),其中一个凸起安装于内环(11)的外环面上的插槽