
一种自适应行走探测机器人.pdf

一条****杉淑


1/9

2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自适应行走探测机器人.pdf
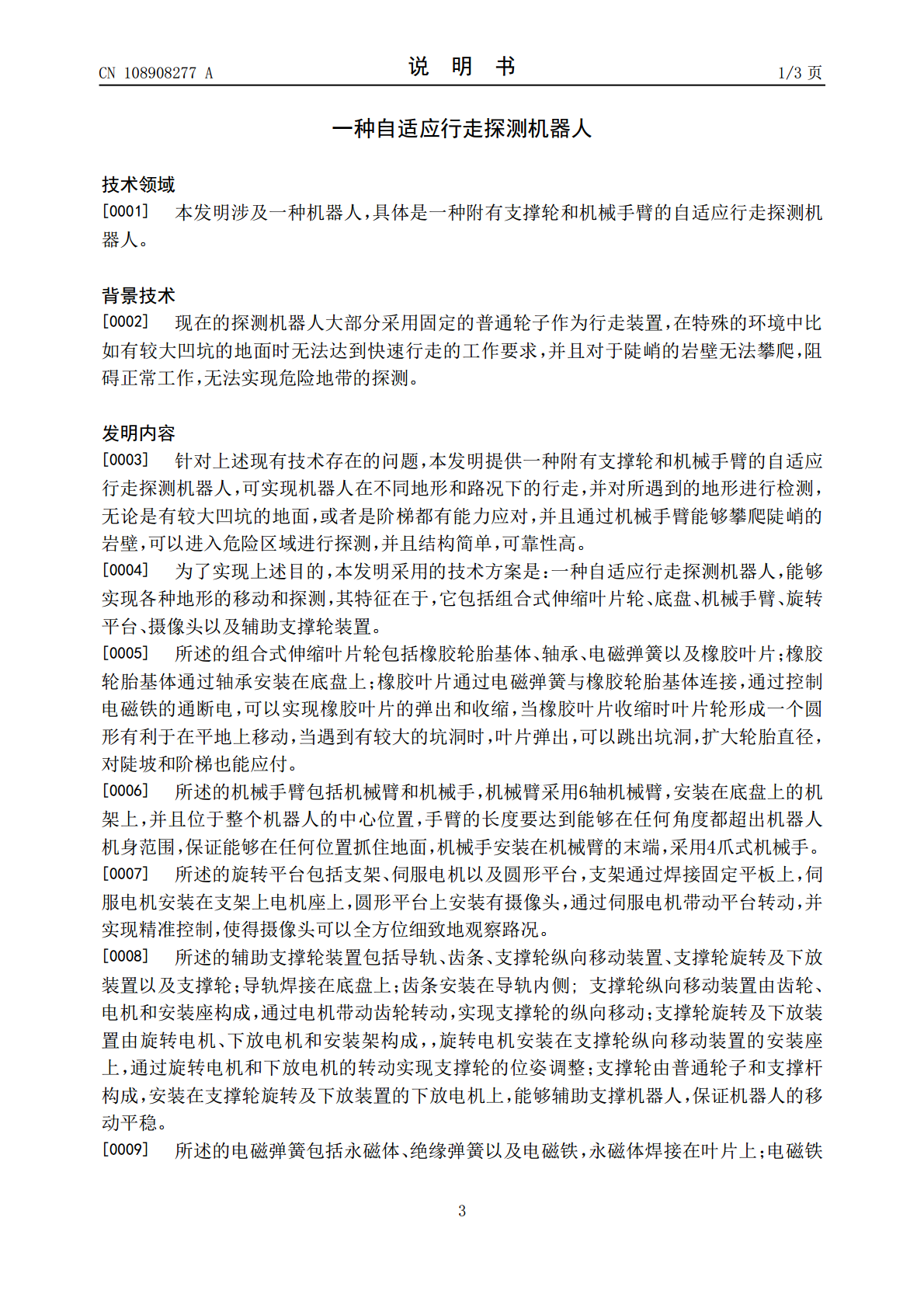
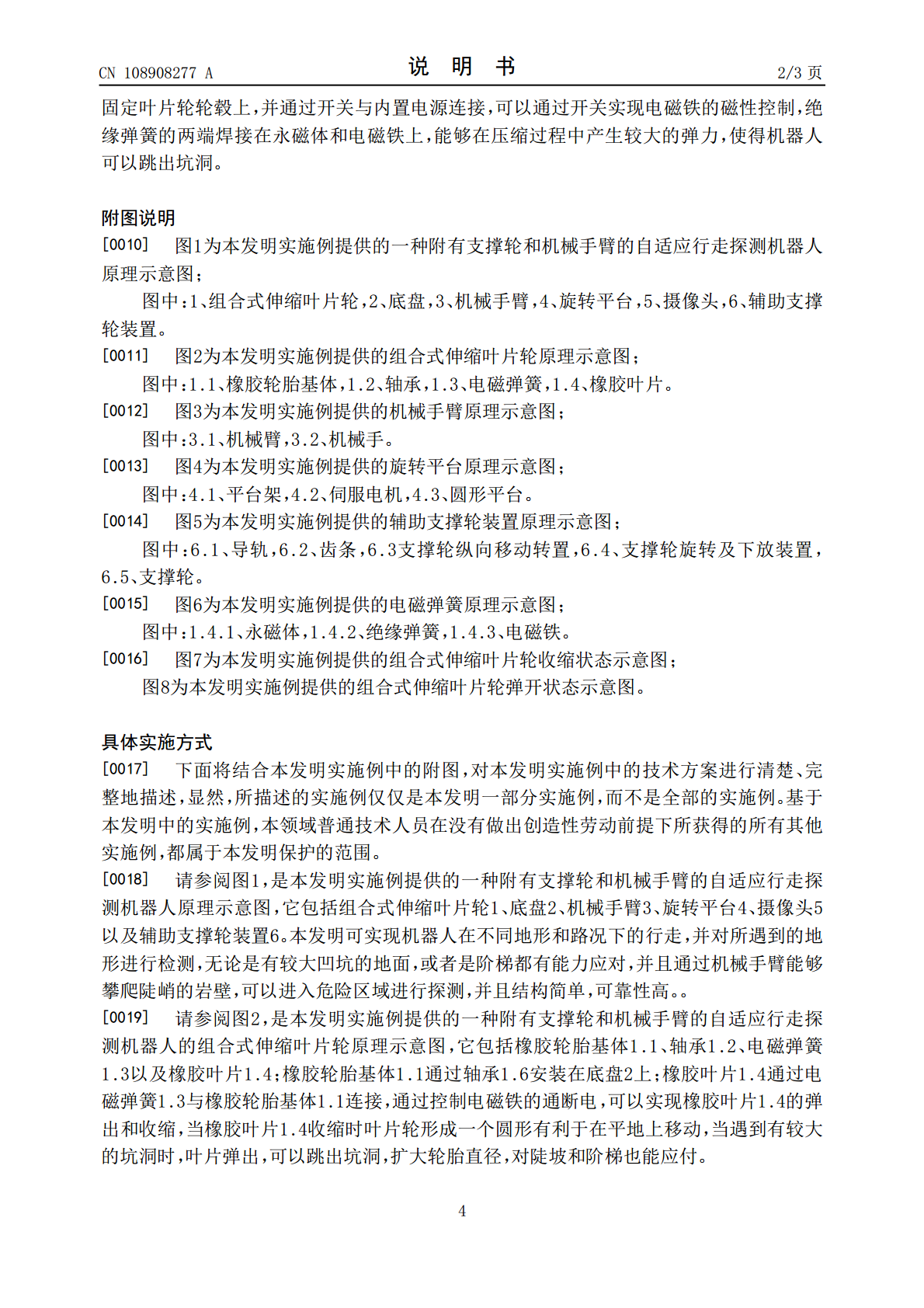
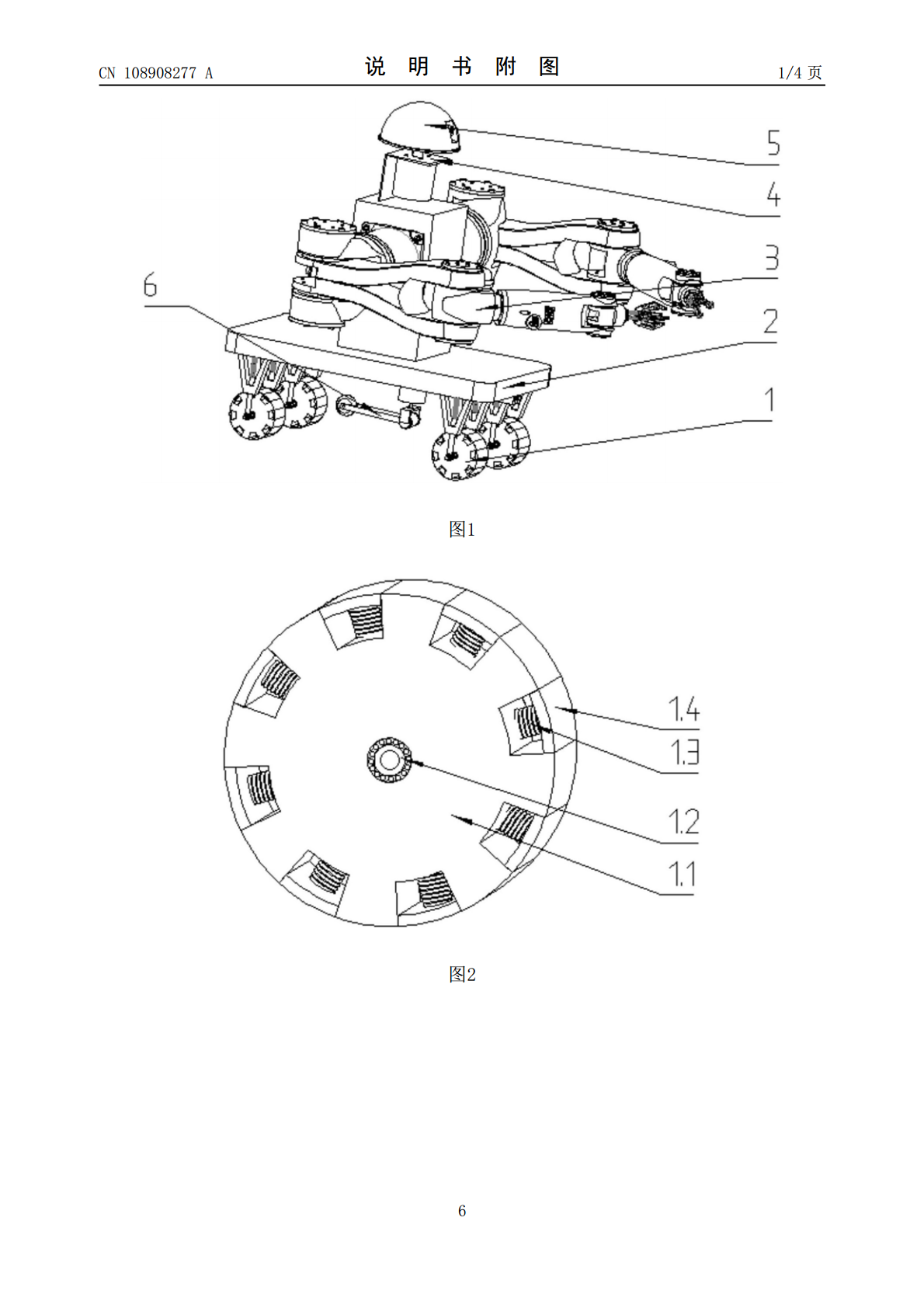
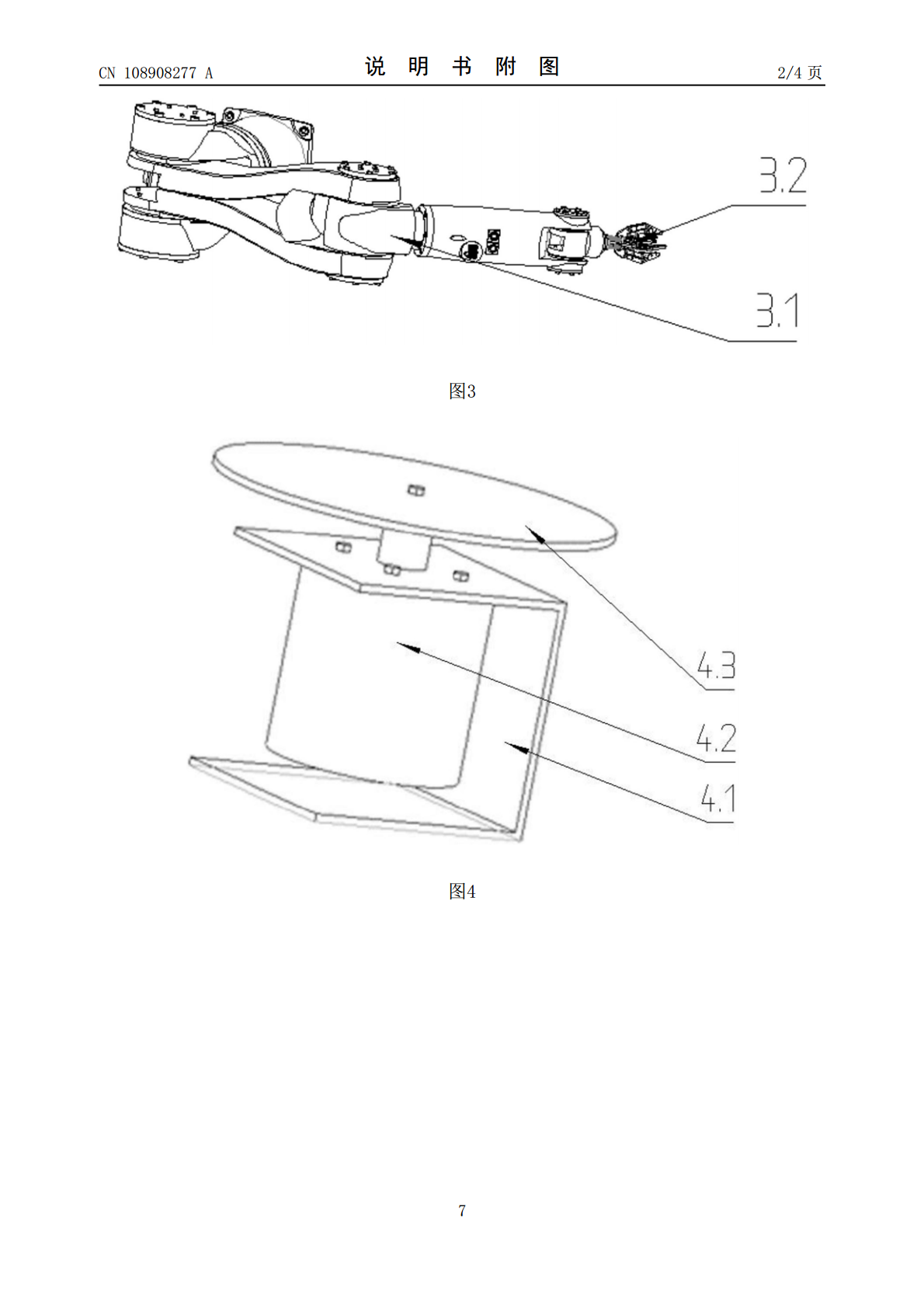
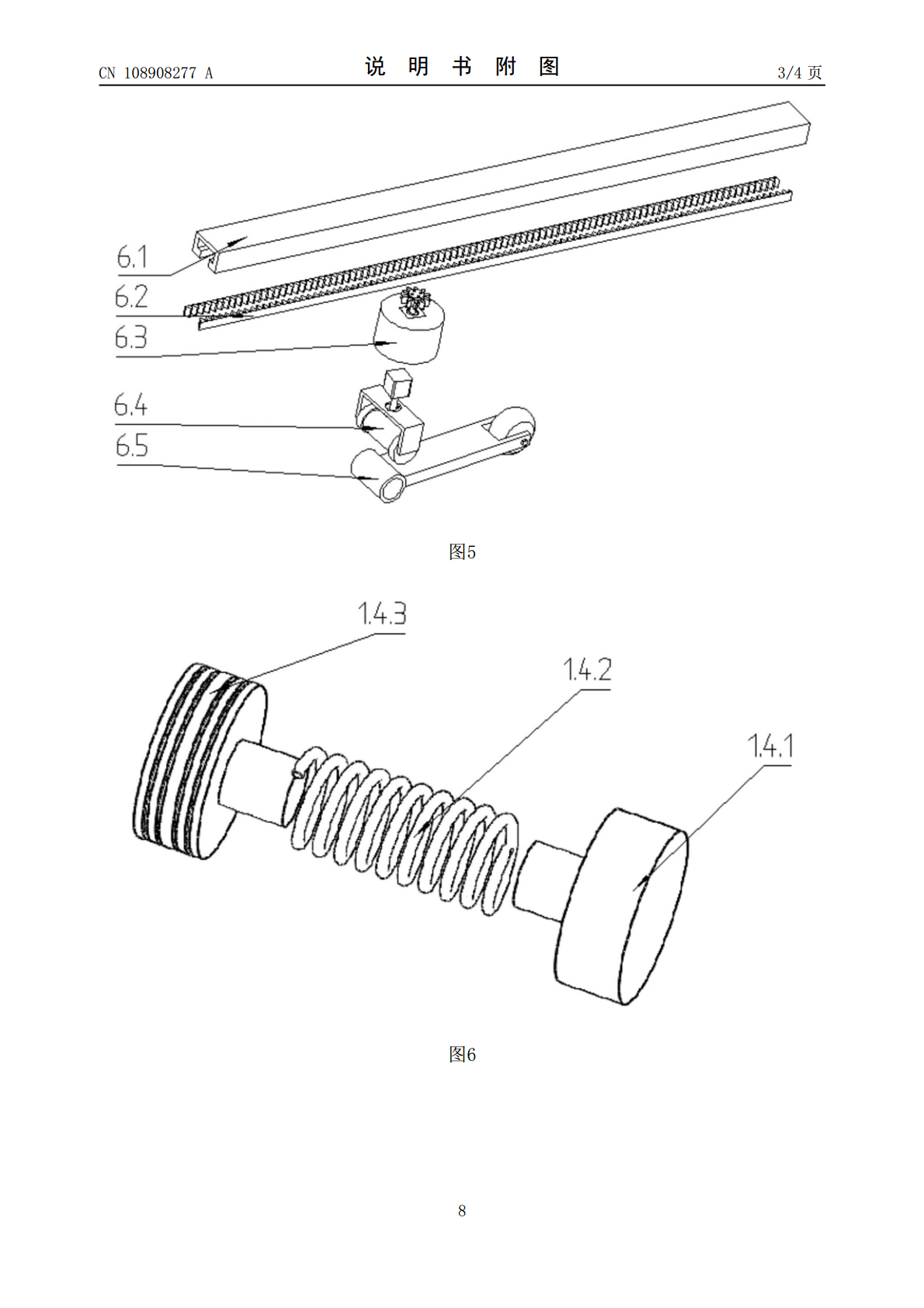
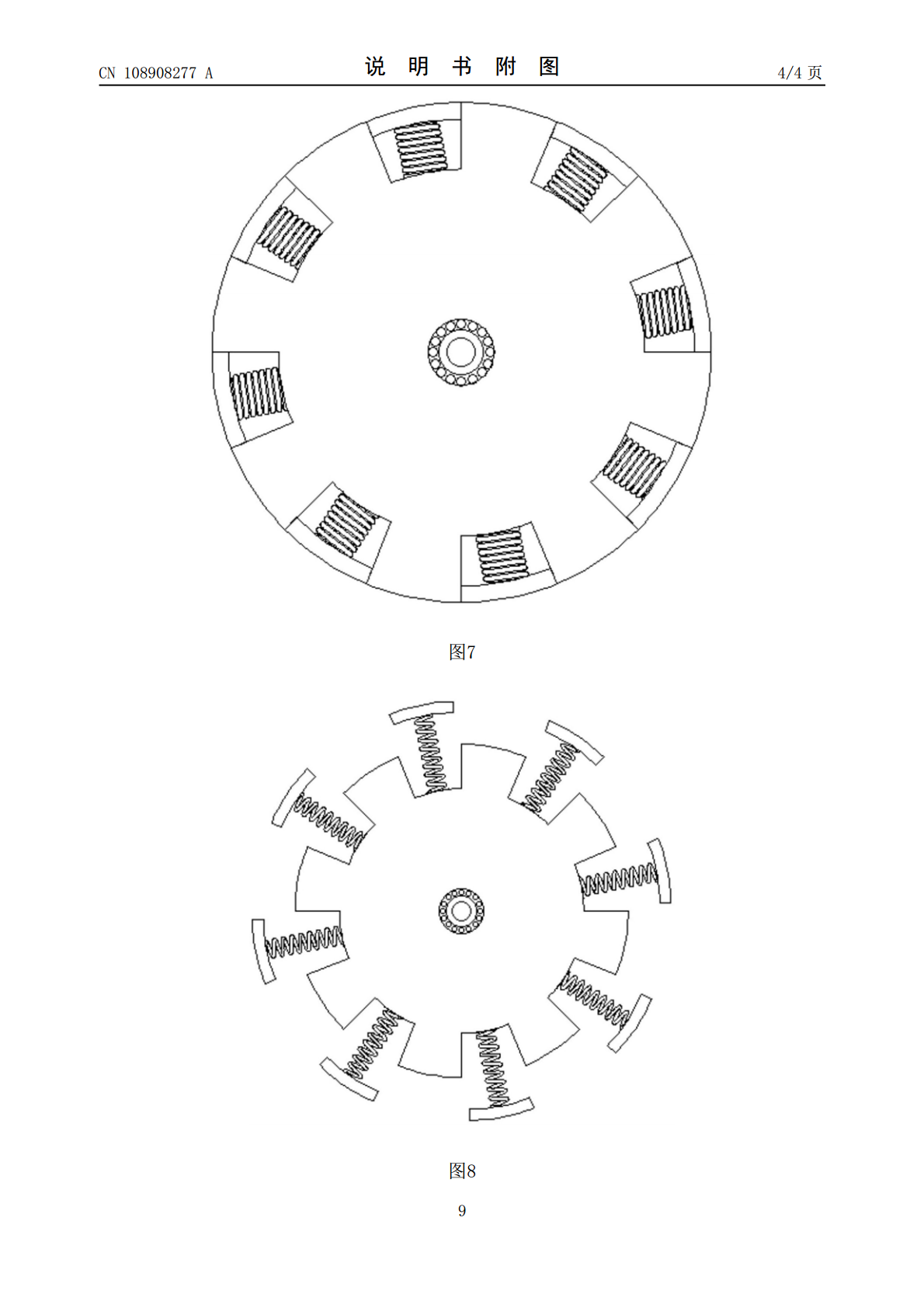
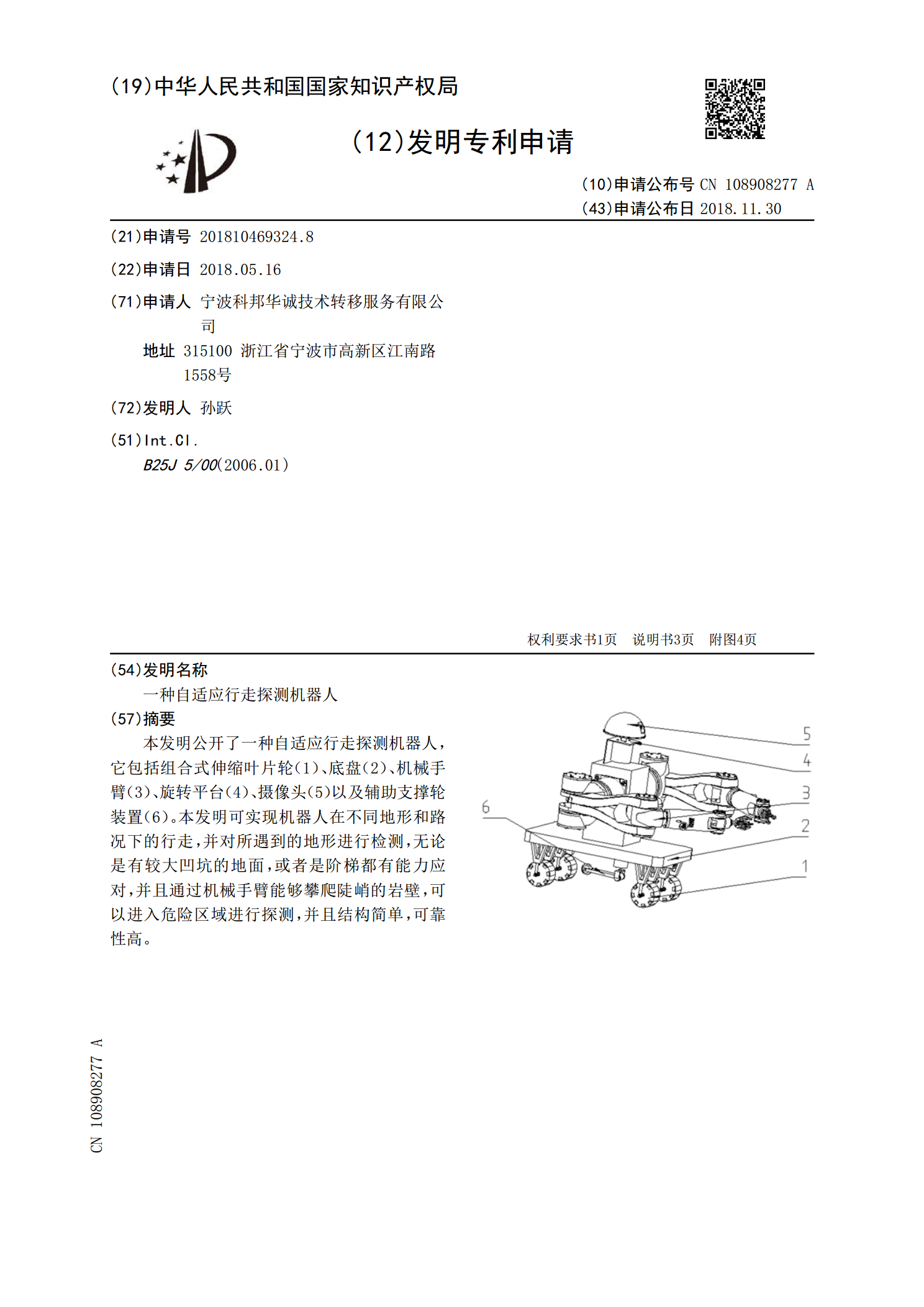
本发明公开了一种自适应行走探测机器人,它包括组合式伸缩叶片轮(1)、底盘(2)、机械手臂(3)、旋转平台(4)、摄像头(5)以及辅助支撑轮装置(6)。本发明可实现机器人在不同地形和路况下的行走,并对所遇到的地形进行检测,无论是有较大凹坑的地面,或者是阶梯都有能力应对,并且通过机械手臂能够攀爬陡峭的岩壁,可以进入危险区域进行探测,并且结构简单,可靠性高。
一种管道探测行走机器人.pdf
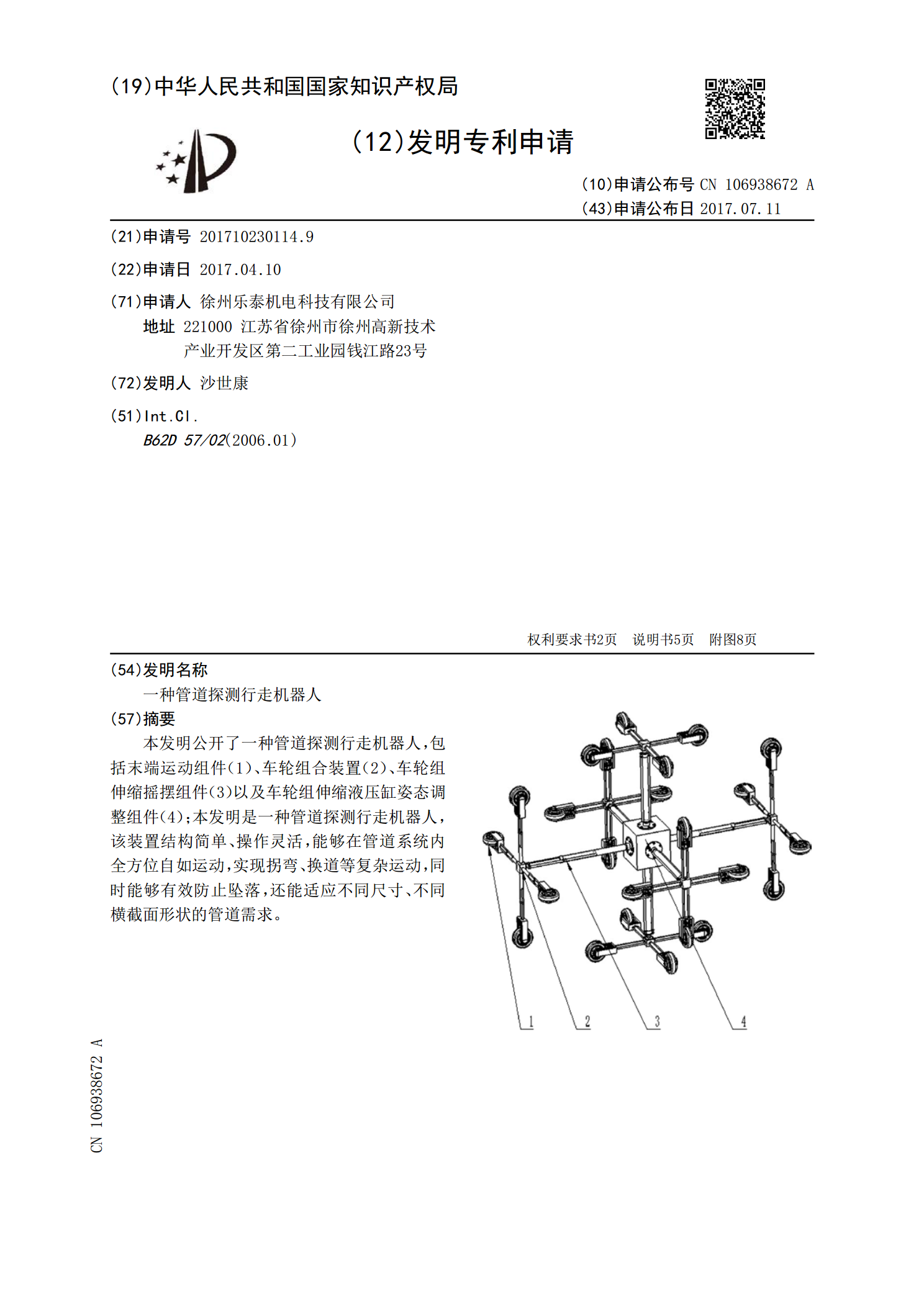
本发明公开了一种管道探测行走机器人,包括末端运动组件(1)、车轮组合装置(2)、车轮组伸缩摇摆组件(3)以及车轮组伸缩液压缸姿态调整组件(4);本发明是一种管道探测行走机器人,该装置结构简单、操作灵活,能够在管道系统内全方位自如运动,实现拐弯、换道等复杂运动,同时能够有效防止坠落,还能适应不同尺寸、不同横截面形状的管道需求。
一种自适应行走机器人.pdf
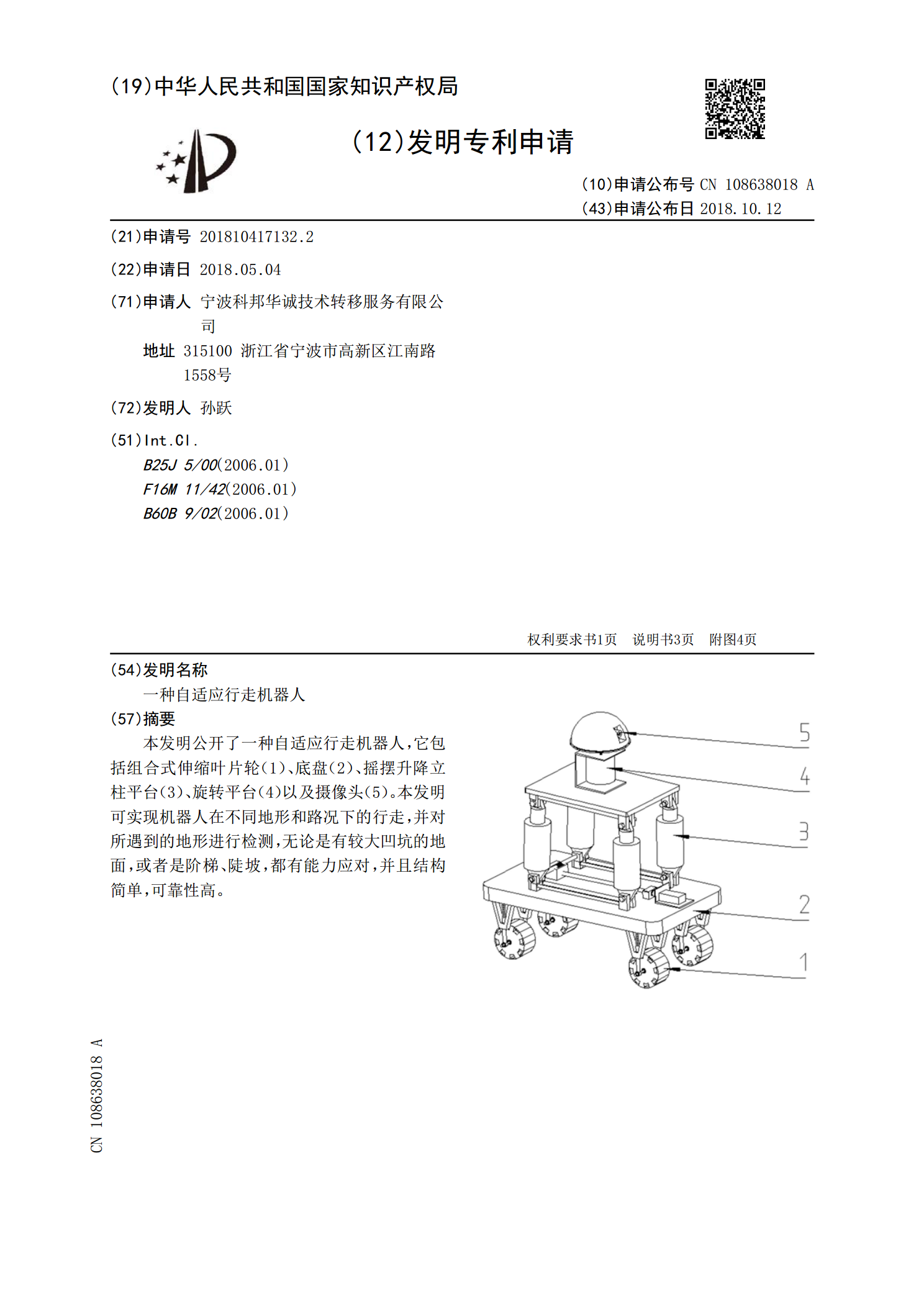
本发明公开了一种自适应行走机器人,它包括组合式伸缩叶片轮(1)、底盘(2)、摇摆升降立柱平台(3)、旋转平台(4)以及摄像头(5)。本发明可实现机器人在不同地形和路况下的行走,并对所遇到的地形进行检测,无论是有较大凹坑的地面,或者是阶梯、陡坡,都有能力应对,并且结构简单,可靠性高。
一种管道探测机器人行走装置.pdf
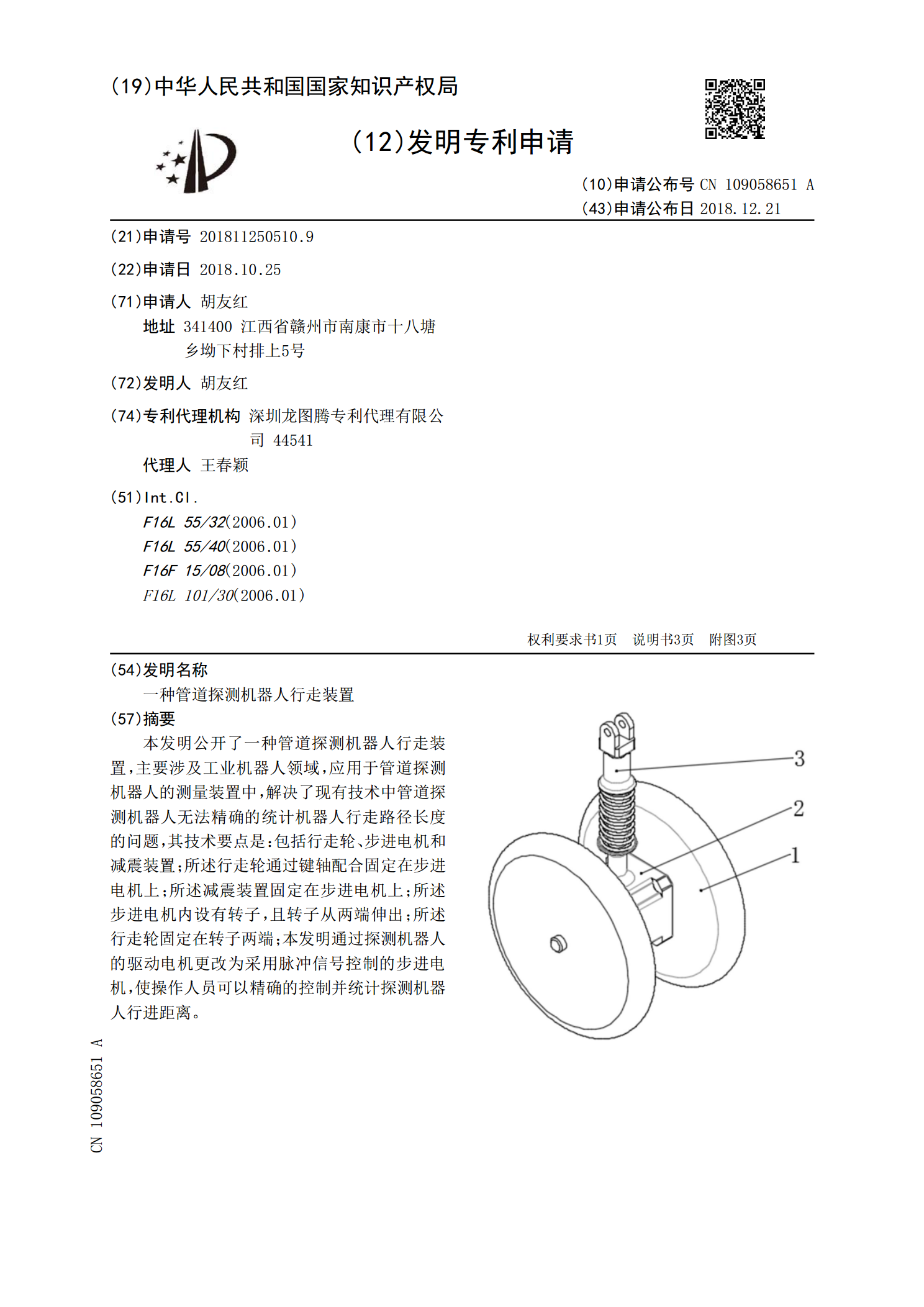
本发明公开了一种管道探测机器人行走装置,主要涉及工业机器人领域,应用于管道探测机器人的测量装置中,解决了现有技术中管道探测机器人无法精确的统计机器人行走路径长度的问题,其技术要点是:包括行走轮、步进电机和减震装置;所述行走轮通过键轴配合固定在步进电机上;所述减震装置固定在步进电机上;所述步进电机内设有转子,且转子从两端伸出;所述行走轮固定在转子两端;本发明通过探测机器人的驱动电机更改为采用脉冲信号控制的步进电机,使操作人员可以精确的控制并统计探测机器人行进距离。
一种行走式矿井探测机器人.pdf
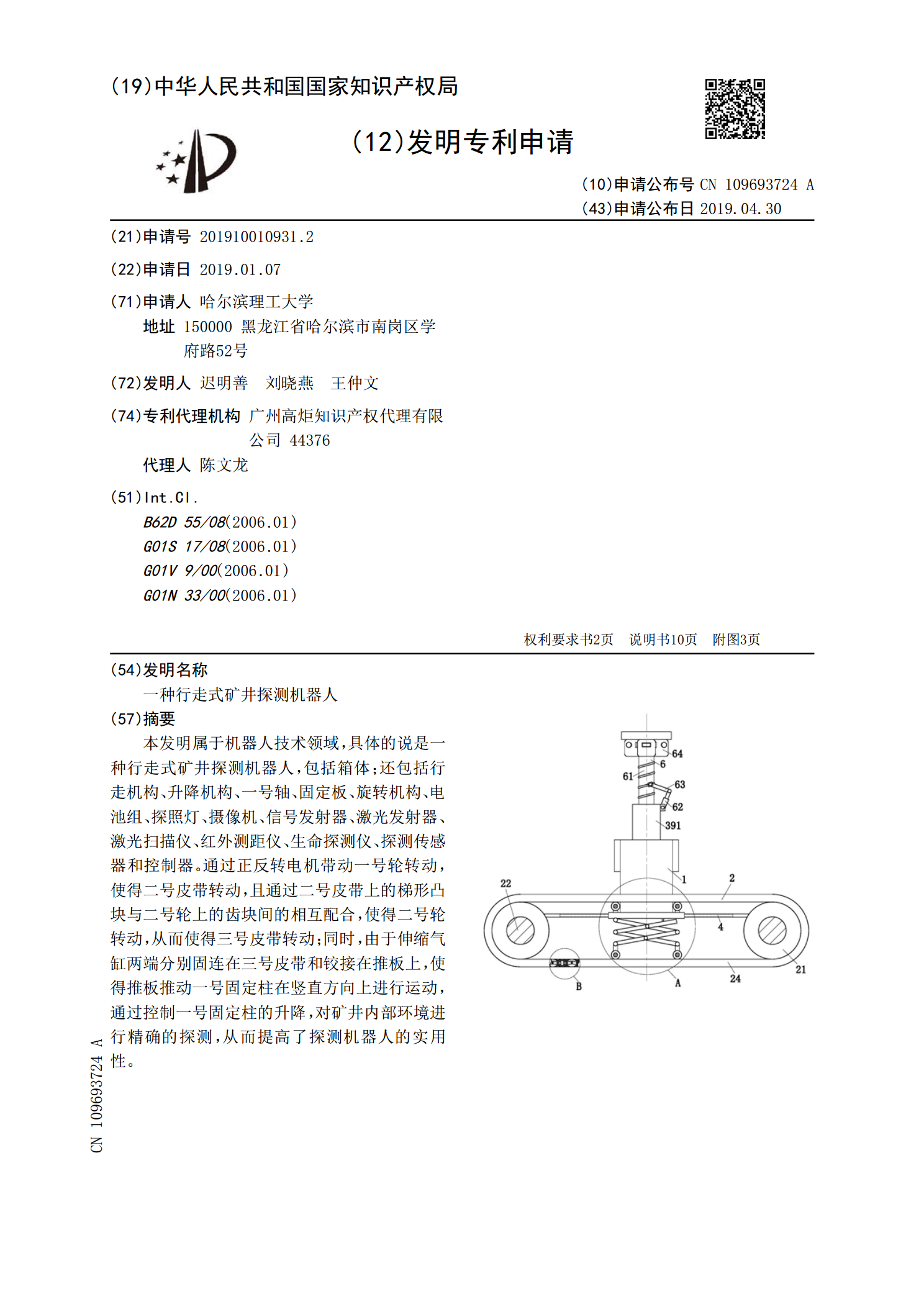
本发明属于机器人技术领域,具体的说是一种行走式矿井探测机器人,包括箱体;还包括行走机构、升降机构、一号轴、固定板、旋转机构、电池组、探照灯、摄像机、信号发射器、激光发射器、激光扫描仪、红外测距仪、生命探测仪、探测传感器和控制器。通过正反转电机带动一号轮转动,使得二号皮带转动,且通过二号皮带上的梯形凸块与二号轮上的齿块间的相互配合,使得二号轮转动,从而使得三号皮带转动;同时,由于伸缩气缸两端分别固连在三号皮带和铰接在推板上,使得推板推动一号固定柱在竖直方向上进行运动,通过控制一号固定柱的升降,对矿井内部环境