
一种MT5500电动轮自卸车电制动装置.pdf

雨巷****彦峰


1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种MT5500电动轮自卸车电制动装置.pdf
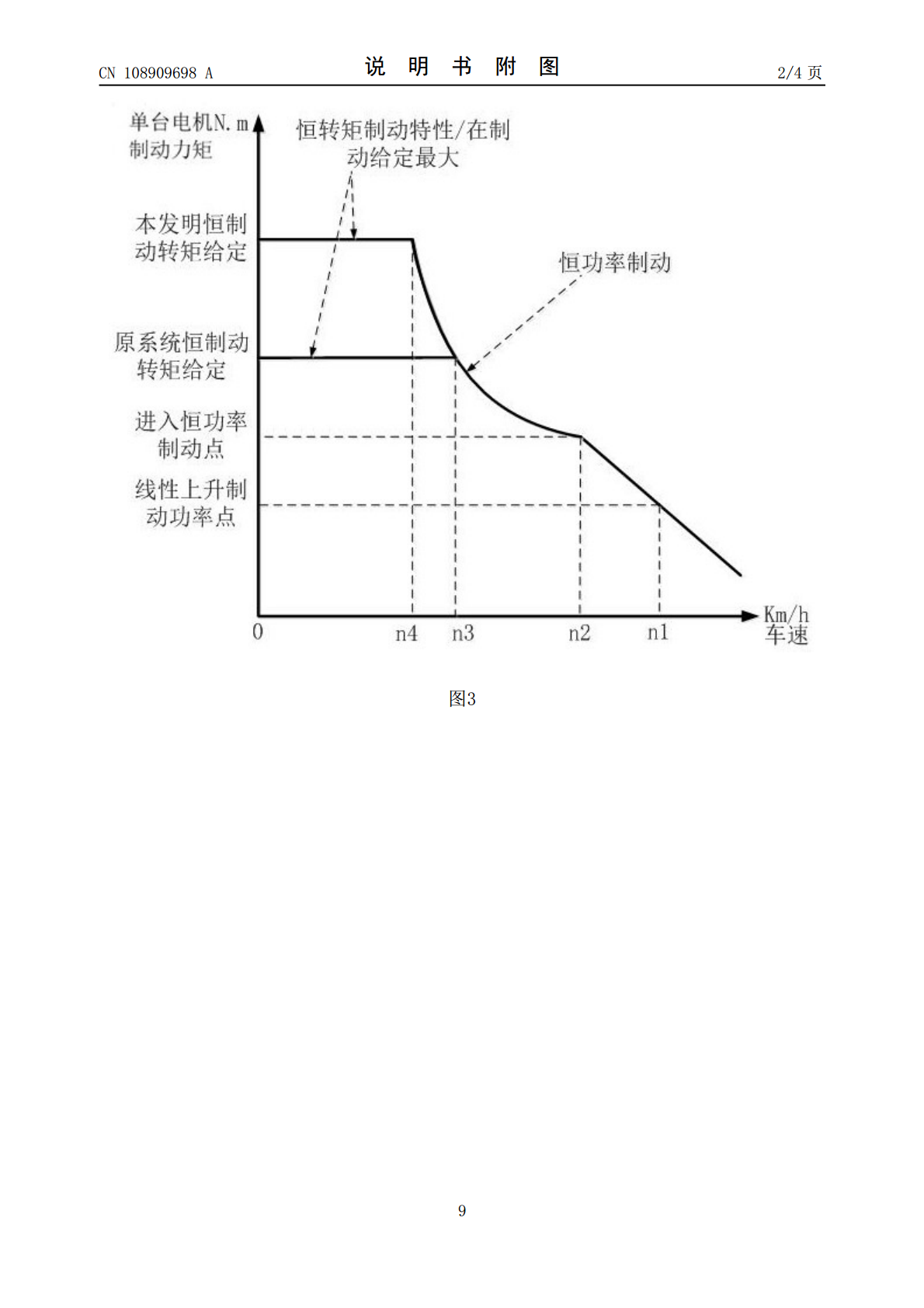
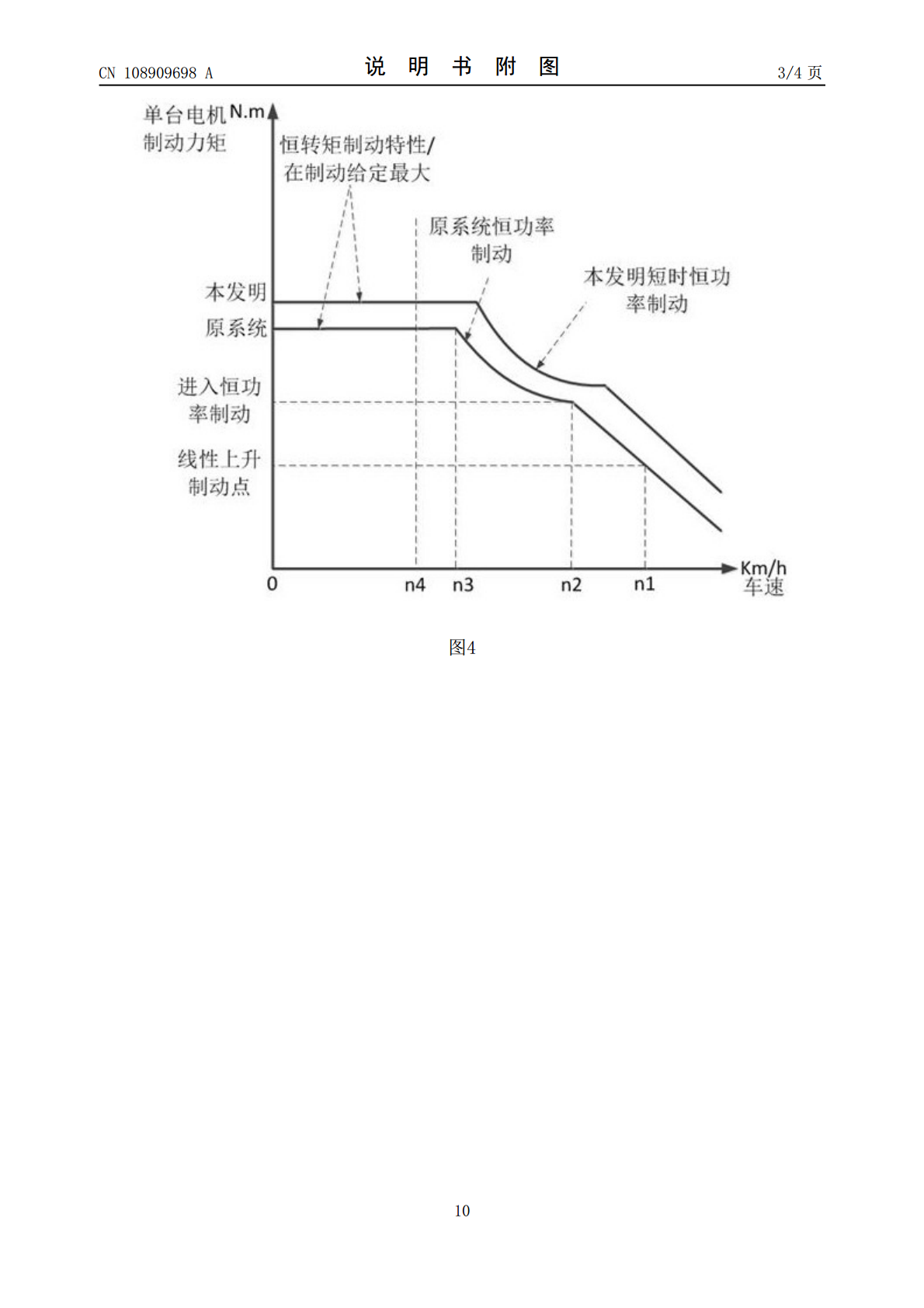
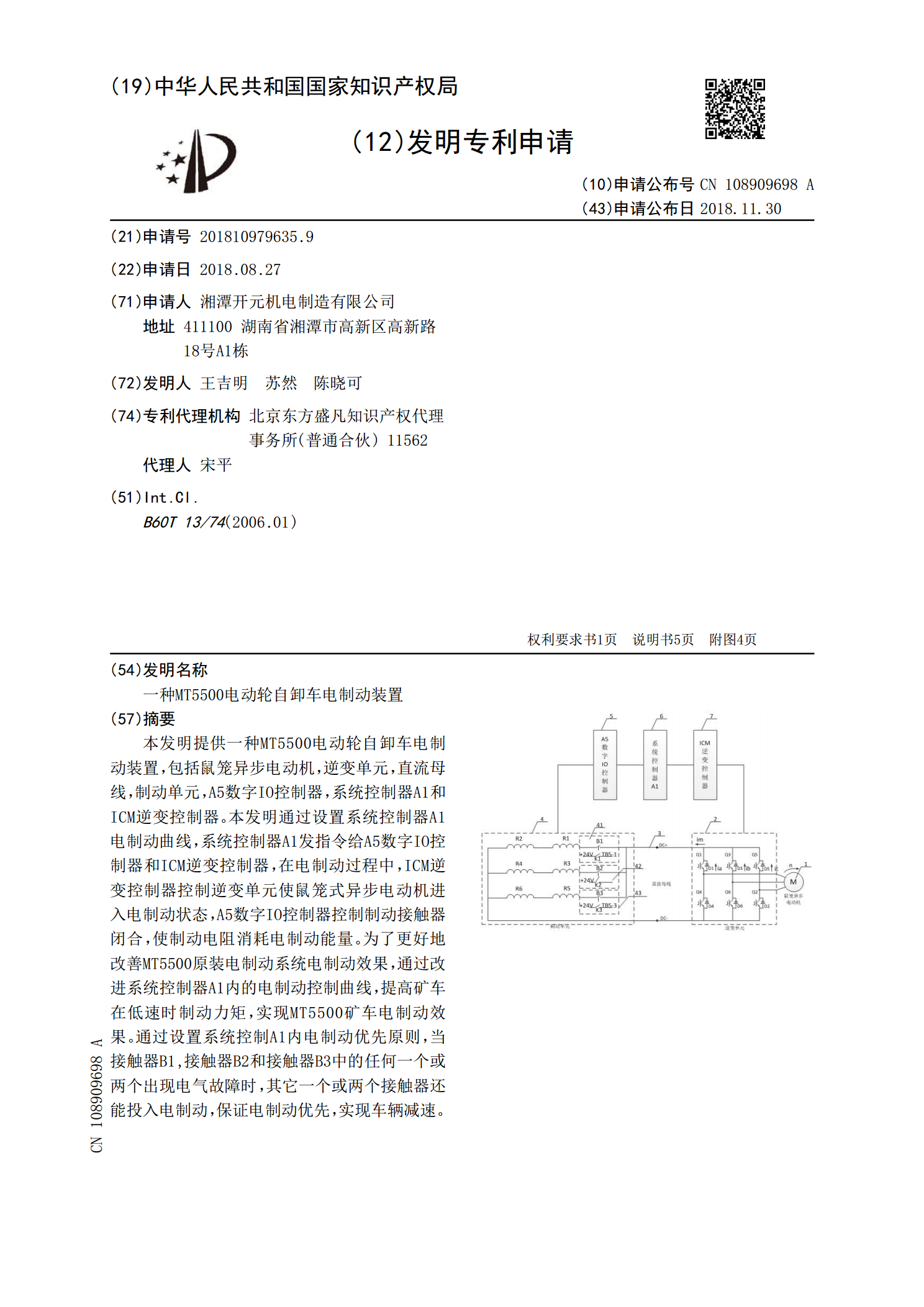
本发明提供一种MT5500电动轮自卸车电制动装置,包括鼠笼异步电动机,逆变单元,直流母线,制动单元,A5数字IO控制器,系统控制器A1和ICM逆变控制器。本发明通过设置系统控制器A1电制动曲线,系统控制器A1发指令给A5数字IO控制器和ICM逆变控制器,在电制动过程中,ICM逆变控制器控制逆变单元使鼠笼式异步电动机进入电制动状态,A5数字IO控制器控制制动接触器闭合,使制动电阻消耗电制动能量。为了更好地改善MT5500原装电制动系统电制动效果,通过改进系统控制器A1内的电制动控制曲线,提高矿车在低速时制动

交流传动电动轮自卸车电制动系统研究.pptx
交流传动电动轮自卸车电制动系统研究01添加章节标题交流传动电动轮自卸车电制动系统概述交流传动电动轮自卸车的定义电制动系统的基本原理电制动系统在自卸车中的应用交流传动电动轮自卸车电制动系统的研究背景交流传动电动轮自卸车的发展现状电制动系统在交流传动电动轮自卸车中的重要性研究目的和意义交流传动电动轮自卸车电制动系统的研究方法文献综述法实验研究法仿真分析法综合比较法交流传动电动轮自卸车电制动系统的研究内容电制动系统的组成和功能电制动系统的控制策略和控制算法电制动系统的性能测试和实验验证电制动系统的优化和改进方案

一种电动轮矿用自卸车装载制动装置.pdf
本发明公开了一种电动轮矿用自卸车装载制动装置,属于装载制动系统应用技术领域,包括装载制动阀体,装载制动阀体由电磁换向阀Ⅰ、减压阀、梭阀、电磁换向阀Ⅱ、回油接口、油源接口、压力传感器Ⅰ、压力传感器Ⅱ和油口构成;电磁换向阀Ⅰ与油源接口连接,减压阀分别与电磁换向阀Ⅰ和梭阀连接,减压阀和梭阀连接后再通过油口与压力传感器Ⅱ连接,电磁换向阀Ⅱ通过油路与压力传感器Ⅰ连接,电磁换向阀Ⅰ、Ⅱ通过油路与回油口连接,装载制动阀体均采用螺纹插装阀,集成于装载制动阀组,便于管路布置。有益效果是系统构造简单,控制实时准确,操作便捷,
电动轮矿用自卸车装载安全制动装置.pdf
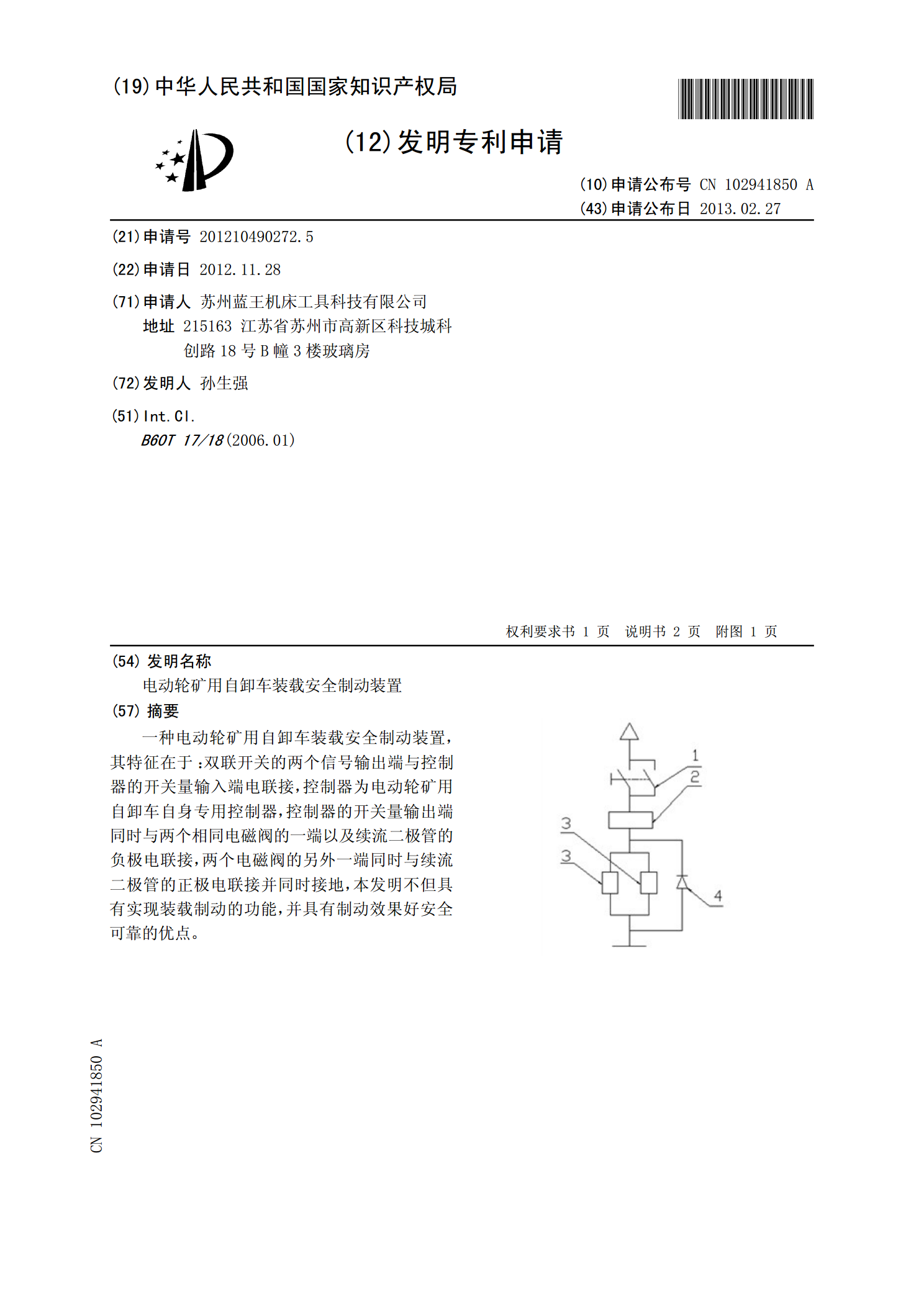
一种电动轮矿用自卸车装载安全制动装置,其特征在于:双联开关的两个信号输出端与控制器的开关量输入端电联接,控制器为电动轮矿用自卸车自身专用控制器,控制器的开关量输出端同时与两个相同电磁阀的一端以及续流二极管的负极电联接,两个电磁阀的另外一端同时与续流二极管的正极电联接并同时接地,本发明不但具有实现装载制动的功能,并具有制动效果好安全可靠的优点。

一种电制动装置、车辆制动系统及车辆.pdf
本发明涉及一种电制动装置、车辆制动系统及车辆,基体上往复地活动装配有用于与制动车轮的制动机构传动连接的制动件,制动件在其往复活动行程上具有向前以驱动制动机构进行制动操作的制动行程,基体上设有可驱动制动件往复活动的电机,基体上还设有蓄能驻车弹簧,蓄能驻车弹簧具有用于由电机驱动向后移动的制动件驱动变形储能的储能行程,还具有用于在需要驻车制动时电机驱动制动件向前缓冲以实现驻车制动的释放行程。本发明不仅可满足驻车制动要求,而且可满足不同行车制动模式的要求,另外兼有自动起、停驻车功能,起到良好的制动效果,提高了车辆